Chapter: Compilers : Principles, Techniques, & Tools : Optimizing for Parallelism and Locality
Iteration Spaces
Iteration Spaces
1 Constructing Iteration Spaces
from Loop Nests
2 Execution Order for Loop Nests
3 Matrix Formulation of
Inequalities
4 Incorporating Symbolic
Constants
5 Controlling the Order of
Execution
6 Changing Axes 798
7 Exercises for Section 11.3
The motivation for this study is to exploit the techniques that,
in simple settings like matrix multiplication as in Section 11.2, were
quite straightforward. In the more general setting, the same techniques apply,
but they are far less intuitive. But by applying some linear algebra, we can
make everything work in the general setting.
As discussed in Section 11.1.5, there are three kinds of
spaces in our trans-formation model: iteration space, data space, and processor
space. Here we start with the iteration space. The iteration space of a loop
nest is defined to be all the combinations of loop-index values in the nest.
Often, the iteration space is rectangular, as in the
matrix-multiplication example of Fig. 11.5. There, each of the nested
loops had a lower bound of 0 and an upper bound of n — 1.
However, in more complicated, but still quite realistic, loop nests, the upper
and/or lower bounds on one loop index can depend on the values of the indexes
of the outer loops. We shall see an example shortly.
1. Constructing Iteration Spaces from Loop Nests
To begin, let us describe the sort of loop nests that can be
handled by the techniques to be developed. Each loop has a single loop index,
which we assume is incremented by 1 at each iteration. That assumption
is without loss of generality, since if the incrementation is by integer c
> 1, we can always replace uses of the index i by
uses of ci + a for some positive or negative constant a, and then
increment i by 1 in the loop. The bounds of the loop should be
written as affine expressions of outer loop indices.
which increments i by 3 each time around the loop. The effect is to set to 0 each of the
elements Z[2], Z[5], Z [ 8 ] , . . . , Z[98]. We can get the same effect with:
That is, we substitute 3j + 2 for i. The lower limit i = 2 becomes j = 0
(just solve 3j + 2 = 2 for j ) , and the
upper limit i < 100 becomes j < 32 (simplify 3j + 2 < 100 to get j
< 32.67 and round down because j has to be an integer).
Typically, we shall use for-loops in loop nests. A while-loop or repeat-loop can be replaced
by a for-loop if there is an index and upper and lower bounds for the index, as
would be the case in something like the loop of Fig. 11.9(a).
A for-loop like f o r ( i =
0 ; i<100; i++) serves exactly the same purpose.
However, some while- or repeat-loops have no obvious limit. For
example, Fig. 11.9(b) may or may not terminate, but there is no way to tell
what condition on i in the unseen body of the loop causes the
loop to break. Figure 11.9(c) is another problem case. Variable n might be a
parameter of a function, for example. We know the loop iterates n
times, but we don't know what n is at compile time, and in fact
we may expect that different executions of the loop will execute different
numbers of times. In cases like (b) and (c), we must treat the upper limit on i
as infinity.
A <i-deep loop nest can be modeled by a dl-dimensional space.
The dimen-sions are ordered, with the kth. dimension representing
the kth nested loop, counting from the outermost loop, inward. A
point (xi,x2,... ,Xd) in this space represents values for all the loop indexes; the
outermost loop index has value xi, the second loop index has
value x2, and so on. The innermost loop index has value x&.
But not all points in this space represent combinations of indexes
that ac-tually occur during execution of the loop nest. As an affine function
of outer loop indices, each lower and upper loop bound defines an inequality
dividing the iteration space into two half spaces: those that are iterations in
the loop (the positive half space), and those that are not (the negative
half space). The conjunction (logical AND) of all the linear equalities
represents the intersection of the positive half spaces, which defines a convex
polyhedron, which we call the iteration space for the loop nest.
A convex polyhedron has the property that if

two points are in the polyhedron, all points on the line between
them are also in the polyhedron. All the iterations in the loop are represented
by the points with integer coordinates found within the polyhedron described by
the loop-bound inequalities. And conversely, all integer points within the
polyhedron represent iterations of the loop nest at some time.
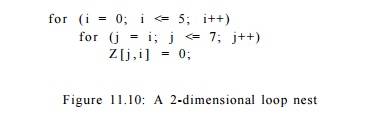
Example 1 1 . 6 : Consider
the 2-dimensional loop nest in Fig. 11.10.
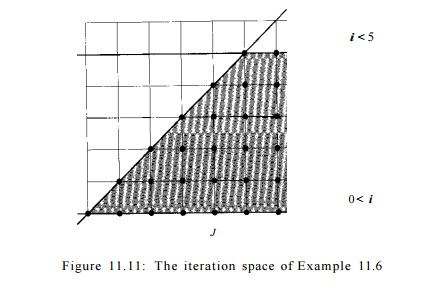
We can model this two-deep loop nest by the 2-dimensional polyhedron
shown in Fig. 11.11. The two axes represent the values of the loop indexes i
and j. Index i can take on any integral value between 0 and 5; index j can take
on any integral value such that i < j < 7.
Iteration Spaces and
Array-Accesses
In the code of Fig.
11.10, the iteration space is also the portion of the array
A that the code
accesses. That sort of access, where the array indexes are also loop
indexes in some order, is very common. However, we should not confuse the space
of iterations, whose dimensions are loop indexes, with the data space. If we
had used in Fig. 11.10 an array access like A[2*i, i+j] instead of A[i,
j], the difference would have been apparent.
2. Execution Order for Loop Nests
A sequential execution of a loop nest sweeps through iterations in
its iteration

3. Matrix Formulation of Inequalities
The iterations in a d-deep loop can be represented mathematically
as

1. Z, as is conventional in mathematics, represents the set of
integers — positive, negative, and zero,
2. B is a d x d integer matrix,
3. b is an integer vector of length d, and
4. 0 is a vector of d 0's.
Example .11.8 : We can write the inequalities of Example 11.6 as
in Fig. 11.13.
That is, the range of i is
described by i > 0 and i <
5; the range of j is described by
j >
i and j < 7. We need to put each of these inequalities
in the form ui + vj + w > 0. Then, [w, v] becomes a row of the matrix B in
the inequality (11.1), and w becomes the
corresponding component of the vector b.
For instance, i > 0 is of this form, with u = 1, v = 0, and w = 0.
This inequality is represented by the
first row of B and top element of b in Fig. 11.13.
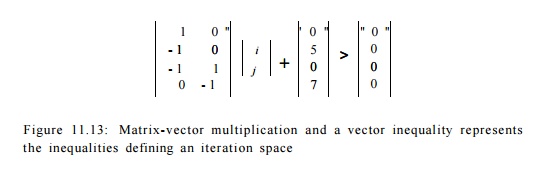
As another example, the inequality i < 5 is equivalent to (—l)i
+ (0)j+5 > 0, and is represented by the second row of B and b in Fig. 11.13.
Also, j > i becomes ( — + + 0 > 0 and is represented by the third
row. Finally, j < 7 becomes (0)i + +
7 > 0 and is the last row of the matrix and vector.
Manipulating
Inequalities
To convert inequalities, as in Example 11.8, we can perform
transforma-tions much as we do for equalities, e.g., adding or subtracting from
both sides, or multiplying both sides by a constant. The only special rule we
must remember is that when we multiply both sides by a negative number, we have
to reverse the direction of the inequality. Thus, i < 5,
multiplied by — 1, becomes —i > —5. Adding 5 to both sides,
gives — i + 5 > 0, which is essentially the second row of Fig.
11.13.
4.
Incorporating Symbolic Constants
Sometimes, we need to optimize a loop nest that involves certain
variables that are loop-invariant for all the loops in the nest. We call such
variables symbolic constants, but to describe the
boundaries of an iteration space we need to treat them as
variables and create an entry for them in the vector of loop indexes, i.e., the
vector i in the general formulation of inequalities (11.1).
Example 11.9 : Consider the
simple loop:
for (i=0; i <= n;
i++) {
}
This loop defines a one-dimensional iteration space, with index i,
bounded by i > 0 and i < n. Since
n is a symbolic constant, we need to include it as a variable, giving us a
vector of loop indexes [i,n]. In matrix-vector form, this iteration space is
defined by
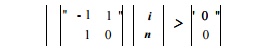
Notice
that, although the vector of array indexes has two dimensions, only the first
of these, representing i, is part of the output — the set of
points lying with the iteration space. •
5. Controlling
the Order of Execution
The
linear inequalities extracted from the lower and upper bounds of a loop body
define a set of iterations over a convex polyhedron. As such, the
represen-tation assumes no execution ordering between iterations within the
iteration space. The original program imposes one sequential order on the
iterations, which is the lexicographic order with respect to the loop index
variables ordered from the outermost to the innermost. However, the iterations
in the space can be executed in any order as long as their data dependences are
honored (i.e., the order in which writes and reads of
any array element are performed by the various assignment statements inside the
loop nest do not change).
The problem of how we choose an ordering that honors the data dependences
and optimizes for data locality and parallelism is hard and is dealt with later
starting from Section 11.7. Here we assume that a legal and desirable ordering
is given, and show how to generate code that enforce the ordering. Let us start
by showing an alternative ordering for Example 11.6.
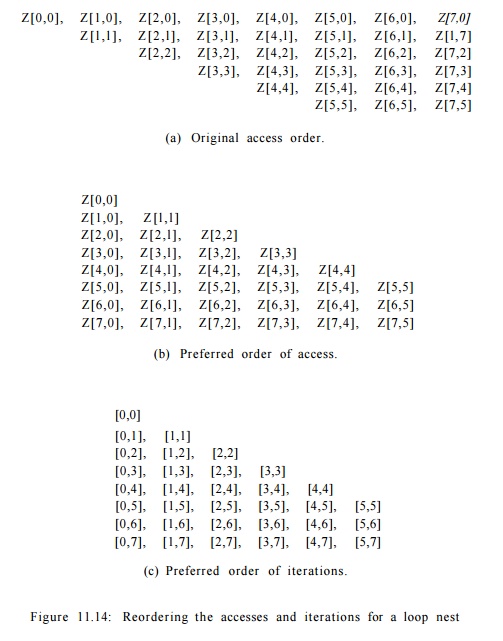
Example 11.10 : There are no dependences between iterations in the
program in Example 11.6. We can
therefore execute the iterations in arbitrary order, sequentially or
concurrently. Since iteration accesses
element Z[j, i] in the code, the
original program visits the array in the order of Fig. 11.14(a). To improve
spatial locality, we prefer to visit contiguous words in the array
consecutively, as in Fig. 11.14(b).
This access pattern is obtained if we execute the iterations in
the order shown in Fig. 11.14(c). That is, instead of sweeping the iteration
space in Fig. 11.11 horizontally, we sweep the iteration space vertically, so j
becomes the index of the outer loop. The code that executes the iterations in
the above order is
Given a convex polyhedron and an ordering of the index variables,
how do we generate the loop bounds that sweep through the space in
lexicographic order of the variables? In the example above, the constraint i
< j shows up as a lower bound for index j in the inner loop in
the original program, but as an upper bound for index «, again in the inner
loop, in the transformed program.
The bounds of the outermost loop, expressed as linear combinations
of sym-bolic constants and constants, define the range of all the possible
values it can take on. The bounds for inner loop variables are expressed as
linear combi-nations of outer loop index variables, symbolic constants and
constants. They define the range the variable can take on for each combination
of values in outer loop variables.
Projection
Geometrically speaking, we can find the loop bounds of the outer
loop index in a two-deep loop nest by projecting the convex polyhedron
representing the iteration space onto the outer dimension of the space. The
projection of a polyhedron on a lower-dimensional space is intuitively the
shadow cast by the object onto that space. The projection of the
two-dimensional iteration space in Fig. 11.11 opto the i axis is the
vertical line from 0 to 5; and the projection onto
the j axis is the horizontal line from 0 to 7. When we
project a 3-dimensional object along the z axis onto a 2-dimensional x
and y plane, we eliminate variable z, losing the height of the
individual points and simply record the 2-dimensional footprint of the
object in the x-y plane.
Loop bound generation is only one of the many uses of
projection. Projection can be defined formally as follows. Let S be an
n-dimensional polyhedron.
The projection of S onto
the first m of its dimensions is the set
of points (xi,x2,... ,xm) such
that for some x m +
1 , x m +
2 , ••• ,xn, vector [xi,x2,... ,xn] is
in S. We can compute projection using
Fourier-Motzkin elimination, as follows:
Algorithm 11.11 : Fourier-Motzkin elimination.
INPUT : A polyhedron S with variables linear constraints involving
the variables X{. to be the variable to be eliminated.
That is, 5 is a set of One given variable xm is specified
OUTPUT : A polyhedron 5" with variables x1,... ,xm-1,xm+i,...
,xn (i.e., all the variables of S except for xm) that is the projection of S
onto dimensions other than the mth .
METHOD : Let C be all the constraints in S involving xm. Do the following:
1. For every pair of a lower bound and an upper bound on xm in C, such as
Note that c1 and c2 are
integers, but L and U may be expressions with
variables other
than xm.
2.
If integers c1
and c2 have a common factor, divide both sides by that
factor.
3. If the new constraint is not satisfiable, then there is no
solution to S; i.e., the polyhedra 5 and
S' are both empty spaces.
4. S' is the set of
constraints S - C, plus all the
constraints generated in step 2.
Note, incidentally, that if xm has u lower
bounds and v upper bounds, elimi-nating xm produces up to
uv inequalities, but no more. •
The constraints added in step (1) of Algorithm 11.11 correspond to
the im-plications of constraints C on the remaining variables in the
system. Therefore, there is a solution in S' if and only if there exists
at least one corresponding solution in S.
Given a solution in S' the range of the
corresponding xm can be found
by replacing all variables but xm in the constraints C by their actual values.
Example 11.12 : Consider the
inequalities defining the iteration space in Fig. 11.11. Suppose we wish
to use Fourier-Motzkin elimination to project the two-dimensional space away
from the i dimension and onto the j dimension. There is one lower
bound on i: 0 < i and two upper bounds: i < j and i
< 5. This generates two constraints: 0 < j and 0 < 5. The
latter is trivially true and can be ignored. The former gives the lower bound
on j, and the original upper bound j < 7 gives the upper
bound. •
Loop - Bounds Generation
Now that we have defined Fourier-Motzkin elimination, the
algorithm to gen-erate the loop bounds to iterate over a convex polyhedron
(Algorithm 11.13) is straightforward. We compute the loop bounds in order, from
the innermost to the outer loops. All the inequalities involving the innermost
loop index vari-ables are written as the variable's lower or upper bounds. We
then project away the dimension representing the innermost loop and obtain a
polyhedron with one fewer dimension. We repeat until the bounds for all the
loop index variables are found.
Algorithm 11.13 : Computing bounds for a given order of variables.
INPUT : A convex
polyhedron S over variables v1,... ,vn.
OUTPUT : A set of lower bounds L{ and upper bounds Ui for each vi,
expressed only in terms of the fj's, for j < i.
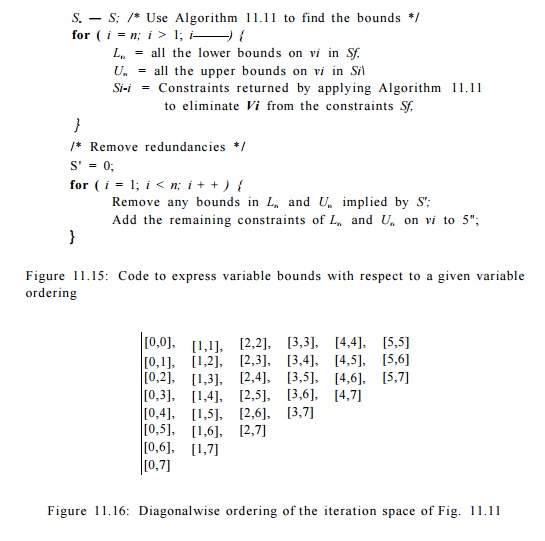
METHOD : The algorithm is described in Fig. 11.15.
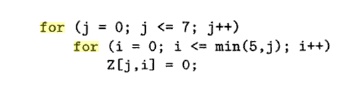
Example 1 1 . 1 4 : We
apply Algorithm 11.13 to generate the loop bounds that sweep the the iteration
space of Fig. 11.11 vertically. The variables are ordered j, i. The algorithm
generates these bounds:
We need
to satisfy all the constraints, thus the bound on i is min(5, j).
There are no redundancies in this example.
6. Changing
Axes
Note
that sweeping the iteration space horizontally and vertically, as discussed
above, are just two of the most common ways of visiting the iteration space.
There are many other possibilities; for example, we can sweep the iteration
space in Example 11.6 diagonal by diagonal, as discussed below in Example
11.15.
Example
1 1 . 1 5 : We can sweep the iteration space shown in Fig. 11.11 diag-onally
using the order shown in Fig. 11.16. The difference between the coordi-nates j
and i in each diagonal is a constant, starting with 0 and ending with 7.
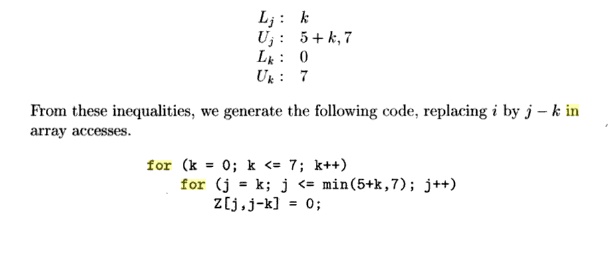
Thus, we define a new variable k = j — i and sweep through the iteration
space in lexicographic order with respect to k and j.
Substituting i = j — k in the inequalities we get:
To create the loop bounds for the order described above, we can
apply Algo-rithm 11.13 to the above set of inequalities with variable ordering k,
j.
In general, we can change the axes of a polyhedron by creating new
loop index variables that represent affine combinations of the original
variables, and defining an ordering on those variables. The hard problem lies
in choosing the right axes to satisfy the data dependences while achieving the
parallelism and locality objectives. We discuss this problem starting with
Section 11.7. What we have established here is that once the axes are chosen,
it is straightforward to generate the desired code, as shown in Example 11.15.
There are many other iteration-traversal orders not handled by
this tech-nique. For example, we may wish to visit all the odd rows in an
iteration space before we visit the even rows. Or, we may want to start with
the iterations in the middle of the iteration space and progress to the
fringes. For applications that have affine access functions, however, the
techniques described here cover most of the desirable iteration orderings.
7. Exercises for Section 11.3
Exercise 11. 3. 1 : Convert each of the following loops to a form
where the loop indexes are each incremented by 1:
a ) f o r (i=10; i<50; i
= i + 7 ) X [ i , i + 1 ] = 0 ; .
b) f o r (i= - 3 ;
i<=10; i=i+2) X[i] = x [ i + l ] ; .
c) f o r (i=50; i>=10; i — ) X[i] = 0; .
Exercise 11. 3 . 2 : Draw or describe the iteration spaces for
each of the follow-ing loop nests:
a) The loop nest of Fig. 11.17(a).
b) The loop nest of Fig. 11.17(b).
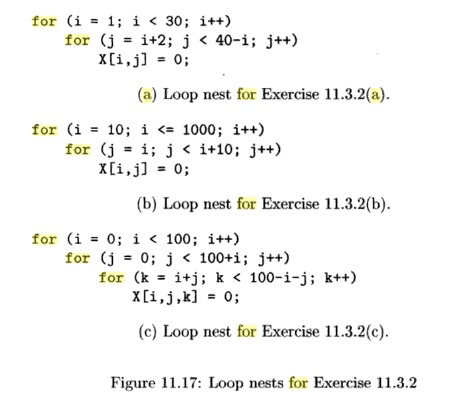
c) The loop nest of Fig. 11.17(c).
Exercise 11 . 3 . 3: Write the constraints implied by each of the loop nests of Fig.
11.17 in the form of (11.1). That is, give the values of the vectors i
and b and the matrix B.
Exercise 1 1 . 3 . 4 : Reverse
each of the loop-nesting orders for the nests of Fig.
11.17.
Exercise 11.3.5 : Use the Fourier-Motzkin elimination algorithm to eliminate i
from each of the sets of constraints obtained in Exercise 11.3.3.
Exercise 11 . 3 . 6: Use the Fourier-Motzkin elimination algorithm to eliminate j
from each of the sets of constraints obtained in Exercise 11.3.3.
Exercise 1 1 . 3 . 7 : For each of the loop nests in Fig. 11.17, rewrite the code
so the axis i is replaced by the major diagonal, i.e., the
direction of the axis is characterized by i = j. The new axis should
correspond to the outermost loop.
Exercise 11 . 3 .
8: Repeat Exercise 11.3.7 for the following changes of axes:
a) Replace i by i + j; i.e., the direction of the
axis is the lines for which i+j is a constant. The new axis corresponds
to the outermost loop.
b) Replace j by i
— 2j. The new axis corresponds to
the outermost loop.
Exercise 11 . 3 . 9: Let A, B, and C be integer constants in the
following loop, with C > 1 and B > A:
f o r ( i = A;
i <= B;
i = i
+ C)
Z [ i ] = 0;
Rewrite the loop so the incrementation of the loop variable is 1
and the initial-ization is to 0, that is, to be of the form
f o r (j = 0; j <=
D; j++)
Z[E*j + F] = 0 ;
for integers D, E, and F.
Express D, E, and F in terms of A, B, and C.
Exercise 11 . 3 . 10: For a generic two-loop nest
f o r ( i = 0; i
<= A; i++)
f o r ( j = B*i+C; j
<= D*i+E;
with A through E integer constants, write the constraints that
define the loop nest's iteration space in matrix-vector form, i.e., in the form
Bi + b = 0.
Exercise 1 1 . 3 . 1 1 : Repeat Exercise 11.3.10 for a generic
two-loop nest with symbolic integer constants rn and n as in
f o r ( i = 0; i <= m; i++)
f o r ( j = A*i+B; j <= O i + n ; j++)
As before, A, B: and C stand for specific integer constants. Only i, j, m, and n should be mentioned in
the vector of unknowns. Also, remember that only i and j are output variables
for the expression.
Related Topics