Chapter: Compilers : Principles, Techniques, & Tools : Optimizing for Parallelism and Locality
Other Uses of Affine Transforms
Other Uses of Affine
Transforms
1 Distributed memory machines
2 Multi-Instruction-Issue Processors
3 Vector and SIMD Instructions
4 Prefetching
So far we have focused on the
architecture of shared memory machines, but the theory of affine loop
transforms has many other applications. We can ap-ply affine transforms to
other forms of parallelism including distributed memory
machines, vector instructions,
SIMD (Single Instruction Multiple Data) instruc-tions, as well as
multiple-instruction-issue machines. The reuse analysis intro-duced in this
chapter also is useful for data prefetching, which is an effective
technique for improving memory performance.
1. Distributed Memory Machines
For distributed memory machines, where processors communicate by
sending messages to each other, it is even more important that processors be
assigned large, independent units of computation, such as those generated by
the affine-partitioning algorithm. Besides computation partitioning, a number
of addi-tional compilation issues remain:
1.
Data
allocation. If processors use
different portions of an array, they each only have to allocate enough
space to hold the portion used. We can use projection to determine the section
of arrays used by each processor. The input is the system of linear
inequalities representing the loop bounds, the
array access functions, and the affine partitions that map the
iterations to processor IDs. We project away the loop indices and find for each
processor ID the set of array locations used.
2. Communication code. We need to generate explicit code to
send and receive data to and from other processors. At each synchronization
point
(a)
Determine the
data residing on one processor that is needed by other processors.
(b)
Generate the
code that finds all the data to be sent and packs it into a buffer.
(c)
Similarly,
determine the data needed by the processor, unpack re-ceived messages, and move
the data to the right memory locations.
Again, if all accesses are affine, these tasks can be performed by
the compiler, using the affine framework.
3. Optimization. It is not necessary for all the
communications to take place at the synchronization points. It is preferable
that each processor sends data as soon as it is available, and that each
processor does not start waiting for data until it is needed. Such
optimizations must be balanced by the goal of not generating too many messages,
since there is a nontrivial overhead associated with processing each message.
Techniques described
here have other applications as well. For example, a special-purpose embedded
system may use coprocessors to offload some of its computations. Or, instead of
demand fetching data into the cache, an embedded system may use a separate
controller to load and unload data into and out of the cache, or other data
buffers, while the processor operates on other data. In these cases, similar
techniques can be used to generate the code to move data around.
2. Multi-Instruction-Issue Processors
We can also use affine loop transforms to optimize the performance
of multi-instruction-issue machines. As discussed in Chapter 10.5, the
performance of a software-pipelined loop is limited by two factors: cycles in
precedence con-straints and the usage of the critical resource. By changing the
makeup of the innermost loop, we can improve these limits.
First, we may be able to use loop transforms to create innermost
paralleliz-able loops, thus eliminating precedence cycles altogether. Suppose a
program has two loops, with the outer being parallelizable and the inner not.
We can permute the two loops to make the inner loop parallelizable and so
create more opportunities for instruction-level parallelism. Notice that it is
not necessary for iterations in the innermost loop to be completely
parallelizable. It is suffi-cient that the cycle of dependences in the loop be
short enough so that all the hardware resources are fully utilized.
We can also relax the limit due to resource usage by improving the
usage balance inside a loop. Suppose one loop only uses the adder, and another
uses only the multiplier. Or, suppose one loop is memory bound and another is
compute bound. It is desirable to fuse each pair of loops in these examples
together so as to utilize all the functional units at the same time.
3.
Vector and SIMD Instructions
Besides multiple-instruction issue, there are two other important
forms of in-struction-level parallelism: vector and SIMD operations. In both
cases, the issue of just one instruction causes the same operation to be
applied to a vector of data.
As mentioned previously, many early supercomputers used vector
instruc-tions. Vector operations are performed in a pipelined manner; the
elements in the vector are fetched serially and computations on different
elements are overlapped. In advanced vector machines, vector operations can be chained:
as the elements of the vector results are produced, they are immediately
con-sumed by operations of another vector instruction without having to wait
for all the results to be ready. Moreover, in advanced machines with scatter/gather
hardware, the elements of the vectors need not be contiguous; an index vector
is used to specify where the elements are located.
SIMD instructions specify that the same operation be performed on
contigu-ous memory locations. These instructions load data from memory in
parallel, store them in wide registers, and compute on them using parallel
hardware. Many media, graphics, and digital-signal-processing applications can
benefit from these operations. Low-end media processors can achieve
instruction-level parallelism simply by issuing one SIMD instruction at a time.
Higher-end pro-cessors can combine SIMD with multiple-instruction issue to
achieve higher performance.
SIMD and vector instruction generation share many similarities
with locality optimization. As we find independent partitions that operate on
contiguous memory locations, we stripmine those iterations and interleave these
operations in innermost loops.
SIMD instruction generation poses two additional difficulties.
First, some machines require that the SIMD data fetched from memory be aligned.
For example, they might require that 25,6-byte SIMD operands be placed in
ad-dresses that are multiples of 256. If the sdurce loop operates on just one
array of data, we can generate one main loop that operates on aligned data and
ex-tra code before and after the loop to handle those elements at the boundary.
For loops operating on more than one array, however, it may not be possible to
align all the data at the same time. Second, data used by consecutive
it-erations in a loop may not be contiguous. Examples include many important
digital-signal-processing algorithms, such as Viterbi decoders and fast Fourier
transforms. Additional operations to shuffle the data around may be necessary
to take advantage of the SIMD instructions.
4.Prefetching
No data-locality optimization can eliminate all memory accesses;
for one, data used for the first time must be fetched from memory. To hide the
latency of memory operations, prefetch instructions have been adopted in
many high-performance processors. Prefetch is a machine instruction that
indicates to the processor that certain data is likely to be used soon, and
that it is desirable to load the data into the cache if it is not present
already.
The reuse analysis
described in Section 11.5 can be used to estimate when caches misses are
likely. There are two important considerations when gener-ating prefetch
instructions. If contiguous memory locations are to be accessed, we need to
issue only one prefetch instruction for each cache line. Prefetch instructions
should be issued early enough so that the data is in the cache by the time it
are used. However, we should not issue prefetch instructions too far in
advance. The prefetch instructions can displace data that may still be needed;
also the prefetched data may be flushed before it is used.
Suppose the target machine has a prefetch instruction that can
fetch two words of data at a time, and that the latency of a prefetch
instruction takes about the time to execute six iterations of the loop above.
The prefetch code for the above example is shown in Fig. 11.68.
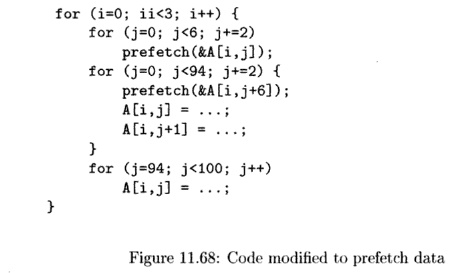
We unroll the innermost loop twice, so a prefetch can be issued for each cache line. We use the concept of software pipelining to prefetch data six iterations before it is used. The prolog fetches the data used in the first six iterations. The steady state loop prefetches six iterations ahead as it performs its computation. The epilog issues no prefetches, but simply executes the remaining iterations.
Summary of Chapter 11
• Parallelism and
Locality from Arrays. The most important opportunities
for both parallelism and locality-based optimizations come from loops that
access arrays. These loops tend to have limited dependences among accesses to
array elements and tend to access arrays in a regular pattern, allowing
efficient use of the cache for good locality.
• Affine Accesses. Almost all theory and techniques for parallelism and locality
optimization assume accesses to arrays are affine: the expressions for the
array indexes are linear functions of the loop indexes.
Reration Spaces. A loop nest with d
nested loops defines a d-dimensional iteration space. The points in the space
are the d-tuples of values that the loop indexes can assume during the
execution of the loop nest. In the affine case, the limits on each loop index
are linear functions of the outer loop indexes, so the iteration space is a
polyhedron.
• Fourier-Motzkin Elimination. A key manipulation of
iteration spaces is to reorder the loops that define the iteration space. Doing
so requires that a polyhedral iteration space be projected onto a subset of its
dimensions. The Fourier-Motzkin algorithm replaces the upper and lower limits
on a given variable by inequalities between the limits themselves.
• Data Dependences and Array Accesses. A central
problem we must solve in order to manipulate loops for parallelism and locality
optimizations is whether two array accesses have a data dependence (can touch
the same array element). When the accesses and loop bounds are affine, the
problem can be expressed as whether there are solutions to a matrix-vector
equation within the polyhedron that defines the iteration space.
• Matrix Rank and Data Reuse. The matrix that
describes an array access can tell us several important things about that
access. If the rank of the matrix is as large as possible (minimum of the
number of rows and number of columns), then the access never touches the same
element twice as the loops iterate. If the array is stored in row-
(column-)major form, then the rank of the matrix with the last (first) row deleted
tells us whether the access has good locality; i.e., elements in a single cache
line are accessed at about the same time.
• Data Dependence and Diophantine Equations. Just
because two accesses to the same array touch the same region of the array does not
mean that they actually access any element in common. The reason is that each
may skip some elements; e.g., one accesses even elements and the other accesses
odd elements. In order to be sure that there is a data dependence, we must
solve a Diophantine (integer solutions only) equation.
Solving
Diophantine Linear Equations. The key technique is to compute the greatest
common divisor (GCD) of the coefficients of the variables. Only if that GCD
divides the constant term will there be integer solutions.
• Space-Partition Constraints. To parallelize the
execution of a loop nest, we need to map the iterations of the loop to a space
of processors, which can have one or more dimensions. The space-partition
constraints say that if two accesses in two different iterations share a data
dependence (i.e., they access the same array element), then they must map to
the same processor. As long as the mapping of iterations to processors is
affine, we can formulate the problem in matrix-vector terms.
• Primitive Code Transformations.
The transformations used to parallelize programs with affine
array accesses are combinations of seven primitives: loop fusion, loop fission,
re-indexing (adding a constant to loop indexes), scaling (multiplying loop
indexes by a constant), reversal (of a loop index), permutation (of the order
of loops), and skewing (rewriting loops so the line of passage through the
iteration space is no longer along one of the axes).
• Synchronization of
Parallel Operations. Sometimes more parallelism can be
obtained if we insert synchronization operations between steps of a program.
For example, consecutive loop nests may have data depen-dences, but
synchronizations between the loops can allow the loops to be parallelized
separately.
• Pipelining. This parallelization technique allows processors to share data,
by synchronously passing certain data (typically array elements) from one
processor to an adjacent processor in the processor space. The method can
improve the locality of the data accessed by each processor.
Time-Partition
Constraints. To discover opportunities for pipelining,
we need to discover solutions to
the time-partition constraints. These
say that whenever two array accesses can
touch the same array element, then the
access in the iteration that occurs first must be assigned to a stage in the
pipeline that occurs no later than the stage to which the second access is
assigned.
Solving
Time-Partition Constraints. Farkas'
Lemma provides a powerful
technique for finding all the affine time-partition mappings that are allowed by a given loop nest with array
accesses. The technique is es- sentially
to replace the primal formulation of the linear inequalities that express the
time-partition constraints by their dual.
• Blocking. This technique breaks each of several loops in a loop nest into
two loops each. The advantage is that doing so may allow us to work on
small sections (blocks) of a multidimensional array, one block at a time. That,
in turn, improves the locality of the program, letting all the needed data
reside in the cache while working on a single block.
• Stripmining. Similar to blocking, this technique breaks only a subset of the
loops of a loop nest into two loops each. A possible advantage is that a
multidimensional array is accessed a "strip" at a time, which may
lead to the best possible cache utilization.
Related Topics