Chapter: Compilers : Principles, Techniques, & Tools : Optimizing for Parallelism and Locality
Matrix Multiply: An In-Depth Example
Matrix Multiply: An In-Depth Example
1 The Matrix-Multiplication
Algorithm
2 Optimizations
3 Cache Interference
4 Exercises for Section 11.2
We shall introduce many of the techniques used by parallel
compilers in an ex-tended example. In this section, we explore the familiar
matrix-multiplication algorithm to show that it is nontrivial to optimize even
a simple and easily parallelizable program. We shall see how rewriting the code
can improve data locality; that is, processors are able to do their work with
far less communica-tion (with global memory or with other processors, depending
on the architec-ture) than if the straightforward program is chosen. We shall
also discuss how cognizance of the existence of cache lines that hold several
consecutive data ele-ments can improve the running time of programs such as
matrix multiplication.
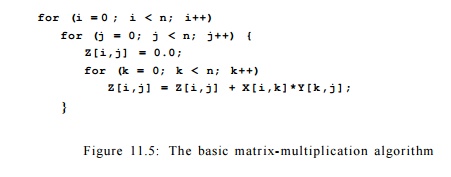
1. The Matrix-Multiplication Algorithm
In Fig. 11.5 we see a
typical matrix-multiplication program.2 It takes two nxn
matrices, X and F, and produces their product in a third n x n matrix Z.
Recall that % — the element of matrix Z in row i and column j
— must become YJl=i ^-ihXkj-
The code of Fig. 11.5
generates n2 results, each of which is an inner product between one
row and one column of the two matrix operands. Clearly, the 2 In
pseudocode programs in this chapter, we shall generally use C syntax, but to
make multidimensional array accesses — the central issue for most of the
chapter — easier to read, we shall use Fortran-style array references, that is,
Z[i,j] instead of
calculations of each of
the elements of Z are independent and can be executed in parallel.
The larger n is, the
more times the algorithm touches each element. That is, there are 3 n 2
locations among the three matrices, but the algorithm performs n3 operations,
each of which multiplies an element of X by an element of Y and adds the
product to an element of Z. Thus, the algorithm is computation-intensive and
memory accesses should not, in principle, constitute a bottleneck.
Serial Execution of the Matrix
Multiplication
Let us first consider
how this program behaves when run sequentially on a uniprocessor. The innermost
loop reads and writes the same element of Z, and uses a row of X
and a column of Y. Z[i,j] can easily be stored in a register and
requires no memory accesses. Assume, without loss of generality, that the
matrix is laid out in row-major order, and that c is the number of array
elements in a cache line.
Figure 11.6 suggests
the access pattern as we execute one iteration of the outer loop of Fig. 11.5.
In particular, the picture shows the first iteration, with i = 0. Each
time we move from one element of the first row of X to the next, we
visit each element in a single column of Y. We see in Fig. 11.6 the
assumed organization of the matrices into cache lines. That is, each small
rectangle represents a cache line holding four array elements (i.e., c = 4 and n
= 12 in the picture).
Accessing X
puts little burden on the cache. One row of X is spread among only n/c
cache lines. Assuming these all fit in the cache, only n/c cache misses
occur for a fixed value of index i, and the total number of misses for
all of X is n2/c, the minimum possible (we assume n
is divisible by c, for convenience).
However, while using
one row of X, the matrix-multiplication algorithm accesses all the elements of
Y, column by column. That is, when j = 0, the inner loop brings to the cache
the entire first column of Y. Notice that the elements of that column are
stored among n different cache lines. If the cache is big enough (or n small
enough) to hold n cache lines, and no other uses of the cache force some of
these cache lines to be expelled, then the column for j = 0 will still be in
the cache when we need the second column of Y. In that case, there will not be
another n cache misses reading Y, until j = c, at which time we need to bring
into the cache an entirely different set of cache lines for Y. Thus, to
complete the first iteration of the outer loop (with i = 0) requires between n
2 / c and n2 cache misses, depending on whether columns of cache lines can
survive from one iteration of the second loop to the next.
Moreover, as we
complete the outer loop, for i = 1,2, and so on, we may have many additional cache
misses as we read Y, or none at all. If the cache is big enough that all n 2 /
c cache lines holding Y can reside together in the cache, then we need no more
cache misses. The total number of cache misses is thus 2 n 2 / c , half for X
and half for Y. However, if the cache can hold one column of Y but not all of
Y, then we need to bring all of Y into cache again, each time we perform an
iteration of the outer loop. That is, the number of cache misses is n 2 / c + n
3 / c ; the first term is for X and the second is for Y. Worst, if we cannot
even hold one column of Y in the cache, then we have n2 cache misses per
iteration of the outer loop and a total of n 2 / c + n3 cache misses.
Row - by - Row
Parallelization
Now, let us consider
how we could use some number of processors, say p proces-sors, to speed
up the execution of Fig. 11.5. An obvious approach to parallelizing matrix
multiplication is to assign different rows of Z to different processors.
A processor is responsible for n/p consecutive rows (we assume n
is divisible by p, for convenience). With this division of labor, each
processor needs to access n/p rows of matrices X and Z, but
the entire Y matrix. One processor will compute n2
jp elements of Z, performing n3/p multiply-and-add
operations to do so.
While the computation
time thus decreases in proportion to p, the communication cost actually rises in proportion to p. That is,
each of p processors has to read n2/p elements of X, but all n2
elements of Y. The total number
of cache lines that must be delivered to the caches of the p processors is at
last n 2 / c + p n 2 / c ; the two terms are for delivering X and copies of Y,
respectively.
As p approaches n, the
computation time becomes 0 ( n 2 ) while the communi-cation cost is 0 ( n 3 ) .
That is, the bus on which data is moved between memory and the processors'
caches becomes the bottleneck. Thus, with the proposed data layout, using a
large number of processors to share the computation can actually slow down the
computation, rather than speed it up.
2. Optimizations
The
matrix-multiplication algorithm of Fig.
11.5 shows that even though an algorithm may reuse the same data, it may
have poor data locality. A reuse of data
results in a cache hit only if the reuse happens soon enough, before the data is displaced from the cache. In this case, n2
multiply-add operations separate the reuse of the same data element in matrix Y,
so locality is poor. In fact, n operations separate the reuse of the same cache
line in Y. In addi-tion, on a multiprocessor, reuse may result in a
cache hit only if the data is reused by the same processor. When we considered
a parallel implementation in Section 11.2.1, we saw that elements of Y
had to be used by every processor. Thus, the reuse of Y is not turned into
locality.
Changing D a t a
Layout
One way to improve
the locality of a program is to change the layout of its data structures. For
example, storing Y in column-major order would have improved the reuse
of cache lines for matrix Y. The applicability of this approach is
limited, because the same matrix normally is used in different operations. If Y
played the role of X in another matrix multiplication, then it would
suffer from being stored in column-major order, since the first matrix in a
multiplication is better stored in row-major order.
Blocking
It is sometimes
possible to change the execution order of the instructions to improve data
locality. The technique of interchanging loops, however, does not improve the
matrix-multiplication routine. Suppose the routine were written to generate a
column of matrix Z at a time, instead of a row at a time. That is, make
the j - loop the outer loop and the z-loop the second loop. Assuming matrices
are still stored in row-major order, matrix Y enjoys better spatial and
temporal locality, but only at the expense of matrix X.
Blocking is another way of reordering iterations in a loop that can greatly
improve the locality of a program. Instead of computing the result a row or
a column at a time, we divide the matrix up into submatrices, or blocks,
as suggested by Fig. 11.7, and we order operations so an entire block is used
over a short period of time. Typically, the blocks are squares with a side of
length B. If B evenly divides n, then
all the blocks are square. If B does not evenly divide n, then the
blocks on the lower and right edges will have one or both sides of length less
than B.
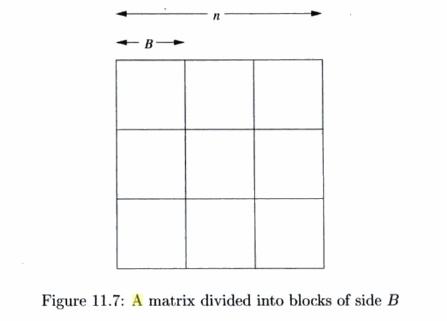
Figure 11.8 shows a
version of the basic matrix-multiplication algorithm where all three matrices
have been blocked into squares of side B. As in Fig. 11.5, Z is assumed to have
been initialized to all O's. We assume that B divides n; if not, then we need
to modify line (4) so the upper limit is min(u + B,n), and similarly for lines
(5) and (6).
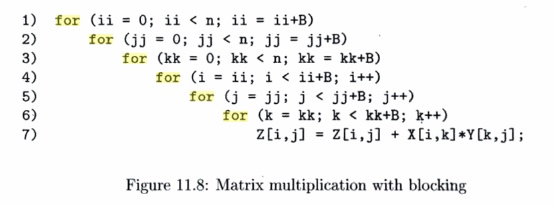
The outer three
loops, lines (1) through (3), use indexes ii, jj,
and kk, which are always incremented by B,
and therefore always mark the left or upper edge of some blocks. With fixed
values of ii, jj, and kk, lines (4) through (7) enable the blocks
with upper-left corners X[ii,kk] and Y[kk,jj] to make all
possible contributions to the block with upper-left corner Z[ii,jj).
If we pick B
properly, we can significantly decrease the number of cache misses, compared
with the basic algorithm, when all of X, Y, or Z cannot fit in
the cache. Choose B such that it is possible to fit one block from each
of the matrices in the cache. Because of the order of the loops, we actually
need each block of Z in cache only once, so (as in the analysis of the
basic algorithm in Section 11.2.1) we shall not count the cache misses due to Z.
Another View of
Block-Based Matrix Multiplication
We can imagine that
the matrices X,Y, and Z of Fig. 11.8 are
not n x n matrices of floating-point numbers,
but rather (n/B) x
(n/B) matrices whose elements are themselves B x B matrices of
floating-point numbers. Lines (1)
through (3) of Fig. 11.8 are then like the three loops of the basic algorithm
in Fig. 11.5, but with n/B as the size of the matrices, rather than n.
We can then think of lines (4) through (7) of Fig. 11.8 as implementing a
single multiply-and-add operation of Fig. 11.5. Notice that in this operation,
the single multiply step is a matrix-multiply step, and it uses the basic
algorithm of Fig. 11.5 on the floating-point numbers that are elements of the
two matrices involved. The matrix addition is element-wise addition of
floating-point numbers.
To bring a block of X
or Y to the cache takes B2/c cache misses; recall c is
the number of elements in a cache line. However, with fixed blocks from X
and Y, we perform B3 multiply-and-add operations in
lines (4) through (7) of Fig. 11.8. Since the entire matrix-multiplication
requires n3 multiply-and-add operations, the number of times we need
to bring a pair of blocks to the cache
is n 3 / B 3 . As we require 2B2/c cache
misses each time we do, the total number of cache misses
is 2n3/Bc.
It is interesting to
compare this figure 2n3/Be with the estimates given in Section 11.2.1. There,
we said that if entire matrices can fit in the cache, then 0 ( n 2 / c ) cache
misses suffice. However, in that case,
we can pick B = n, i.e., make each matrix be a single block. We again get 0 ( n 2 / c ) as our estimate of
cache misses. On the other hand, we
observed that if entire matrices will not fit in cache, we require 0 ( n 3 / c
) cache misses, or even 0 ( n 3 ) cache misses. In that case, assuming that we
can still pick a significantly large B
(e.g., B could be 200, and we could still fit three blocks of 8-byte
numbers in a one-megabyte cache), there is a great advantage to using blocking
in matrix multiplication.
The blocking
technique can be reapplied for each level of the memory hi-erarchy. For
example, we may wish to optimize register usage by holding the operands of a 2
x 2 matrix multiplication in registers. We choose successively bigger block
sizes for the different levels of caches and physical memory.
Similarly, we can
distribute blocks between processors to minimize data traf-fic. Experiments
showed that such optimizations can improve the performance of a uniprocessor by
a factor of 3, and the speed up on a multiprocessor is close to linear with
respect to the number of processors used.
3. Cache Interference
Unfortunately, there is somewhat more to the story of cache
utilization. Most caches are not fully
associative (see Section 7.4.2). In a
direct-mapped cache, if n is a multiple of the cache size, then all the
elements in the same row of an n x n array will be competing for the same cache
location. In that case, bringing in the second element of a column will throw
away the cache line of the first, even though the cache has the capacity to
keep both of these lines at the same time.
This situation is referred to as
cache interference.
There are various solutions to this problem. The first is to
rearrange the data once and for all so that the data accessed is laid out in
consecutive data locations. The second is to embed the n x n array in a
larger mxn array where m is chosen to minimize the interference
problem. Third, in some cases we can choose a block size that is
guaranteed to avoid interference.
4. Exercises for Section 11.2
Exercise 1 1 . 2 . 1 : The
block-based matrix-multiplication algorithm
of Fig. 11.8 does not have the initialization of the matrix Z to
zero, as the code of Fig. 11.5 does. Add
the steps that initialize Z to all zeros in Fig. 11.8.
Related Topics