Chapter: Compilers : Principles, Techniques, & Tools : Optimizing for Parallelism and Locality
Array Data-Dependence Analysis
Array Data-Dependence Analysis
1 Definition of Data Dependence of Array Accesses
2 Integer Linear Programming
3 The GCD Test
4 Heuristics for Solving Integer Linear Programs
5 Solving General Integer Linear Programs
6 Summary
7 Exercises for Section 11.6
Parallelization or locality optimizations frequently reorder the
operations ex-ecuted in the original program. As with all optimizations,
operations can be reordered only if the reordering does not change the
program's output. Since we cannot, in general, understand deeply what a program
does, code optimization generally adopts a simpler, conservative test for when
we can be sure that the program output is not affected: we check that the
operations on any memory location are done in the same order in the original
and modified programs. In the present study, we focus on array accesses, so the
array elements are the memory locations of concern.
Two accesses, whether read or write, are clearly independent
(can be re-ordered) if they refer to two different locations. In addition, read
operations do not change the memory state and therefore are also independent.
Following Section 11.5, we say that two accesses are data dependent if
they refer to the same memory location and at least one of them is a write
operation. To be sure that the modified program does the same as the original,
the relative execu-tion ordering between every pair of data-dependent
operations in the original program must be preserved in the new program.
Recall from Section
10.2.1 that there are three flavors of data dependence:
2. Antidependence,
where a read is followed by a write to the same location.
3. Output dependence, which is two writes to the same location.
In the discussion above, data dependence is defined for dynamic
accesses. We say that a static access in a program depends on another as long
as there exists a dynamic instance of the first access that depends on some
instance of the second.5
It is easy to see how data dependence can be used in
parallelization. For example, if no data dependences are found in the accesses
of a loop, we can easily assign each iteration to a different processor.
Section 11.7 discusses how we use this information
systematically in parallelization.
1. Definition of Data Dependence of Array Accesses
Let us consider two static accesses to the same array in possibly
different loops.
The first is represented by access function and bounds T = (F,f, B
, b ) and is in a d-deep loop nest; the second is represented by T' = ( F ' , f
,B',b') and is in a rf'-deep loop nest. These accesses are data dependent if
1. At least one of them is
a write reference and
2. There exist vectors i in
Zd and i' in Zd' such that
(a)
Bi > 0,
(b)
B'i' > 0, and
(c)
Fi + f = F'i' +
f.
Since a static access normally embodies many dynamic accesses, it
is also meaningful to ask if its dynamic accesses may refer to the same memory
loca-tion. To search for dependencies between instances of the same static
access, we assume T — T' and augment the definition above with the additional
constraint that i ^ i' to rule out the trivial solution.
Example 1 1 . 2 9
: Consider the following 1-deep loop nest:
for (i = 1; i < 10;
i++) {
Z[i] =
Z[i-1];
}
This loop has two accesses: Z[i - 1] and Z[i}; the first is a read reference and the second a
write. To find all the data dependences in this program, we need to check if
the write reference shares a dependence with itself and with the read
reference:
1. Data dependence between Z[i - 1] and Z[i]. Except for the first
iteration, each iteration reads the value written in the previous iteration.
Mathe matically, we know that there is a dependence because there exist
integers i and i' such that

There are nine solutions to the above system of constraints: (i
= 2, %' — 1), (i = 3,z' = 2), and so forth.
2. Data dependence between Z[i] and itse//. It is easy to
see that different iterations in the loop write to different locations; that
is, there are no data dependencies among the instances of the write reference Z[i].
Math-ematically, we know that there does not exist a dependence because there
do not exist integers i and i' satisfying

Notice that the third condition, i = i', comes from the
requirement that Z[i] and Z[i'] are the same memory location The
contradictory fourth condition, i =!i', comes from the
requirement that the dependence be nontrivial — between different dynamic
accesses.
It is not
necessary to consider data dependences
between the read reference Z[i — 1] and
itself because any two read accesses are independent.
2. Integer Linear Programming
Data dependence requires finding whether there exist integers that
satisfy a system consisting of equalities and inequalities. The equalities are
derived from the matrices and vectors representing the accesses; the
inequalities are derived from the loop bounds. Equalities can be expressed as
inequalities: an equality x — y can be replaced by two inequalities,
x > y and y > x.
Thus, data dependence may be phrased as a search for integer
solutions that satisfy a set of linear inequalities, which is precisely the
well-known problem of integer linear programming. Integer linear
programming is an NP-complete problem. While no polynomial algorithm is known,
heuristics have been de-veloped to solve linear programs involving many
variables, and they can be quite fast in many cases. Unfortunately, such
standard heuristics are inappro-priate for data dependence analysis, where the
challenge is to solve many small and simple integer linear programs rather than
large complicated integer linear programs.
1. Apply the GCD (Greatest Common Divisor) test, which checks if
there is an integer solution to the equalities, using the theory of linear
Diophan-tine equations. If there are no integer solutions, then there are no
data dependences. Otherwise, we use the equalities to substitute for some of
the variables thereby obtaining simpler inequalities.
2. Use a set of simple
heuristics to handle the large numbers of typical in-equalities.
3. In the rare case
where the heuristics do not work, we use a linear integer programming solver
that uses a branch-and-bound approach based on Fourier-Motzkin elimination.
3. The GCD Test
The first subproblem is to check for the existence of integer
solutions to the equalities. Equations with the stipulation that solutions must
be integers are known as Diophantine equations. The following example shows how
the issue of integer solutions arises; it also demonstrates that even though
many of our examples involve a single loop nest at a time, the data dependence
formulation applies to accesses in possibly different loops.
The access Z[2*i] only touches even elements of Z, while access Z[2 * j + 1] touches only odd
elements. Clearly, these two accesses share no data depen-dence regardless of
the loop bounds. We can execute iterations in the second loop before the first,
or interleave the iterations. This example is not as con-trived as it may look.
An example where even and odd numbers are treated differently is an array of
complex numbers, where the real and imaginary com-ponents are laid out side by
side.
To prove the absence of data dependences in this example, we reason as follows. Suppose there were integers i and j such that
Z[2 * i] and Z[2 * j + 1] are the same array element. We get the Diophantine equation

There are no integers i and j that can satisfy the above equation.
The proof is that if i is an integer, then 2i is even. If j is an integer, then 2j is even, so 2j +
1 is odd. No even number is also an odd number.
Therefore, the equation has no integer solutions, and thus there is no
dependence between the read and write accesses.
To describe when there is a solution to a linear Diophantine
equation, we need the concept of the greatest common divisor (GCD) of two or more integers. The
GCD o f integers 0 1 , a 2 , . . . , a n , denoted gcd(ai, a 2 , • • • , an)y i
s the largest integer that evenly divides all these integers. GCD's can be
computed efficiently by the well-known Euclidean algorithm (see the box on the
subject).
Example 1 1 . 3 1 : gcd(24,36,54) = 6, because 24/6, 36/6, and 54/6 each have remainder
0, yet any integer larger than 6 must leave a nonzero remainder when dividing
at least one of 24, 36, and 54. For instance, 12 divides 24 and 36 evenly, but
not 54.
The importance of the GCD is in the following
theorem.
Theorem 11.32 :
The linear Diophantine equation

has an integer
solution for x1, x2,... ,xn
if and only if gcd(ai, a2,... , an)
divides c. •
Example 1 1 . 3 3 : We observed in Example 11.30 that the linear Diophantine equation
2i = 2j + 1 has no solution. We can write this equation as
2i- 2j = 1.
Now gcd(2, —2) = 2,
and 2 does not divide 1 evenly. Thus, there is no solution. For another
example, consider the equation
24x + 36y + 54z = 30.
Since gcd(24,36,54) =
6, and 30/6 = 5, there is a solution in integers for x, y, and z.
One solution is x = —1, y = 0, and z = 1, but there are an
infinity of other solutions. •
The first step to the
data dependence problem is to use a standard method such as Gaussian
elimination to solve the given equalities. Every time a linear equation is
constructed, apply Theorem 11.32 to rule out, if possible, the ex-istence of an
integer solution. If we can rule out such solutions, then answer
"no". Otherwise, we use the solution of the equations to reduce the
number of variables in the inequalities.
The Euclidean Algorithm
The Euclidean algorithm for finding gcd(a, b)
works as follows. First, as-sume that a and b are positive
integers, and a>b. Note that the GCD of negative numbers, or the GCD
of a negative and a positive number is the same as the GCD of their absolute
values, so we can assume all integers are positive.
If a = b, then gcd(a, b) = a. If a > b, let c be the remainder of a/b.
If c = 0, then b evenly divides a, so gcd(a, b)
= b. Otherwise, compute gcd(6,c); this result will also be gcd(a,
b).
To compute
gcd(ai, a 2 , . . . , an), for n
> 2, use the Euclidean algorithm to
compute gcd ( a i , a 2 ) = c. Then
recursively compute gcd ( c , a 3 , a 4 , • • •
,an).
Looking at each equality by itself, it appears
there might be a solution. For the
first equality, gcd(l, - 2 , 1 ) = 1 divides 0, and for the second
equality, gcd(3,2,1) = 1 divides
5. However, if we use the first equality to solve for z = 2y — x and substitute
for z in the second equality, we get 2x + Ay = 5.
This Diophantine equation has no solution, since
gcd(2,4) = 2 does not divide 5 evenly. •
4. Heuristics for Solving Integer Linear Programs
The data dependence problem requires many simple integer linear
programs be solved. We now discuss several techniques to handle simple
inequalities and a technique to take advantage of the similarity found in data
dependence analysis.
Independent -
Variables Test
Many of the integer
linear programs from data dependence consist of inequalities that involve only
one unknown. The programs can be solved simply by testing if there are integers
between the constant upper bounds and constant lower bounds independently.
Example 11 . 35 :
Consider the nested loop
for (i = 0; i <= 10;
i++)
for (j = 0; j <= 10; j++)
Z[i,j] = Z[j+10,i+9]
To find if there is a data dependence between Z[i,
j] and Z[j +10, i + 9], we ask if there exist integers i, j, i', and j' such
that
The GCD test, applied to the two equalities above,
will determine that there may be an integer solution. The integer
solutions to the equalities are expressed by

for any integers t1 and t2.
Substituting the variables t1 and t2 into the linear
inequalities, we get

Thus, combining the lower bounds from the last two
inequalities with the upper bounds from the first two, we deduce
Since the lower bound
on t2 is greater than its upper bound, there is no integer
solution, and hence no data dependence. This example shows that even if there
are equalities involving several variables, the GCD test may still create
linear inequalities that involve one variable at a time. •
Acyclic Test
Another simple
heuristic is to find if there exists a variable that is bounded below or above
by a constant. In certain circumstances, we can safely replace the variable by
the constant; the simplified inequalities have a solution if and only if the
original inequalities have a solution. Specifically, suppose every lower bound
on vi is of the form
where c1, cx,... , c« are all nonnegative. Then we can replace variable Vi by its smallest possible integer value. If there is no such lower bound, we simply
replace vi with — oo. Similarly, if every constraint involving V{ can be
expressed in the two forms above, but
with the directions of the inequalities reversed, then we can replace variable
V{ with the largest possible integer value, or by oo if there is no constant
upper bound. This step can be repeated
to simplify the inequalities and in some cases determine if there is a
solution.
Example 1 1 . 3 6 : Consider the following
inequalities:
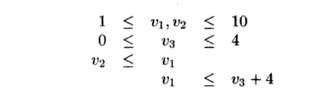
Variable v1 is bounded from below by v2 and from
above by v3. However, v2 is bounded from
below only by the constant 1, and v3 is bounded from above only by the constant
4. Thus, replacing v2 by 1 and v3 by 4 in the inequalities, we obtain
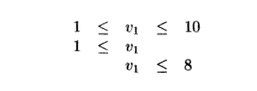
which can now be solved easily with the
independent-variables test.
The Loop -
Residue Test
Let us now consider
the case where every variable is bounded from below and above by other
variables. It is commonly the case in data dependence analysis that constraints
have the form Vi < Vj+c, which can be solved using a simplified
version of the loop-residue test due to Shostack. A set of these
constraints can be represented by a directed graph whose nodes are labeled with
variables. There is an edge from Vi to Vj labeled c
whenever there is a constraint Vi < Vj + c.
We define the weight
of a path to be the sum of the labels of all the edges along the path. Each
path in the graph represents a combination of the con-straints in the system.
That is, we can infer that v < v' + c whenever there exists a path
from v to v' with weight c. A cycle in the graph with
weight c represents the constraint v < v + c for each node v
on the cycle. If we can find a negatively weighted cycle in the graph, then we
can infer v < v, which is impossible. In this case, we can conclude
that there is no solution and thus no dependence.
We can also incorporate into the loop-residue test
constraints of the form c < v and v < c for variable v
and constant c. We introduce into the system of inequalities a new dummy
variable vo, which is added to each constant upper and lower bound. Of
course, v0 must have value 0, but since the loop-residue test
only looks for cycles, the actual values of the variables never becomes
significant. To handle constant bounds, we replace
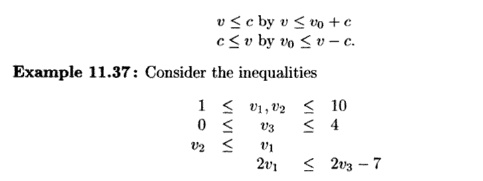
The constant upper and lower bounds on v1 become VQ
<v1 — l and v1 < i>o + 10;
the constant bounds on v2 and v3
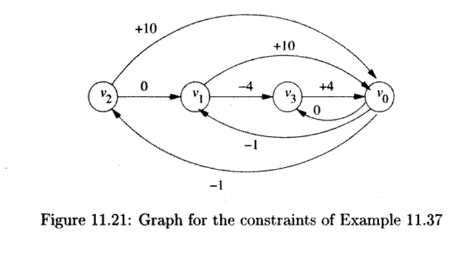
are handled similarly. Then,
converting the last constraint to v1 < v3
— 4, we can create the graph shown in Fig. 11.21. The
cycle v1,v3,Vo,v1 has weight
— 1, so there
is no solution
to this set of
inequalities.
Memoization
Often, similar data
dependence problems are solved repeatedly, because simple access patterns are
repeated throughout the program. One important technique to speed up data
dependence processing is to use memoization. Memoization tabulates the
results to the problems as they are generated. The table of stored solutions is
consulted as each problem is presented; the problem needs to be solved only if
the result to the problem cannot be found in the table.
5. Solving General Integer Linear Programs
We now describe a
general approach to solving the integer linear programming problem. The problem
is NP-complete; our algorithm uses a branch-and-bound approach that can take an
exponential amount of time in the worst case. How-ever, it is rare that the
heuristics of Section 11.6.4 cannot resolve the problem, and even if we do need
to apply the algorithm of this section, it seldom needs to perform the
branch-and-bound step.
The approach is to
first check for the existence of rational solutions to the inequalities. This
problem is the classical linear-programming problem. If there is no rational
solution to the inequalities, then the regions of data touched by the accesses
in question do not overlap, and there surely is no data dependence. If there is
a rational solution, we first try to prove that there is an integer solution,
which is commonly the case. Failing that, we then split the polyhedron bounded
by the inequalities into two smaller problems and recurse.
The elements
touched by access Z[i] are Z [ l ] , . . . ,Z[9], while the elements touched by Z[i + 10] are Z [ l l ] , . . . , Z[19]. The
ranges do not overlap and therefore there are no data dependences. More
formally, we need to show that there are no two dynamic accesses i and i', with
1 < i < 9, 1 < i' < 9, and i = %' + 10. If there were such integers
i and i', then we could substitute i' + 10
for i and get the four constraints on i': 1 < i' < 9 and 1 < i' +10 <
9. However, i' + 10 < 9 implies i'
< — 1, which contradicts 1 < i'.
Thus, no such integers i and %' exist.
Algorithm 11.39
describes how to determine if an integer solution can be found for a set of
linear inequalities based on the Fourier-Motzkin elimination algorithm.
Algorithm 11.39
: Branch-and-bound solution to integer
linear programming problems.
INPUT : A convex polyhedron Sn
over variables vi,... ,vn.
OUTPUT : "yes"
if Sn has an integer solution,
"no" otherwise.
METHOD : The
algorithm is shown in Fig. 11.22.
Lines (1) through (3)
attempt to find a rational solution to the inequalities.
If there no rational solution, there is no integer solution. If a
rational solution is found, this means that the inequalities define a nonempty
polyhedron. It is relatively rare for such a polyhedron not to include any
integer solutions — for that to happen, the polyhedron must be relatively thin
along some dimension and fit between integer points.
Thus, lines (4)
through (9) try to check quickly if there is an integer solution. Each step of
the Fourier-Motzkin elimination algorithm produces a polyhedron with one fewer
dimension than the previous one. We consider the polyhedra in reverse order. We
start with the polyhedron with one variable and assign to that variable an
integer solution roughly in the middle of the range of possible values if
possible. We then substitute the value for the variable in all other polyhedra,
decreasing their unknown variables by one. We repeat the same process until
we have processed all the polyhedra, in which case an integer
solution is found, or we have found a variable for which there is no integer
solution.
If we cannot find an integer value for even the first variable,
there is no integer solution (line 10). Otherwise, all we know is that there is
no integer solution including the combination of specific integers we have
picked so far, and the result is inconclusive. Lines (11) through (13) represent
the branch-and-bound step. If variable Vi is found to have a
rational but not integer solution, we split the polyhedron into two with the
first requiring that Vi must be an integer smaller than the
rational solution found, and the second requiring that Vi must be
an integer greater than the rational solution found. If neither has a solution,
then there is no dependence.
6. Summary
We have shown that essential pieces of information that a compiler
can glean from array references are equivalent to certain standard mathematical
concepts. Given an access function T — (F, f, B, b):
1. The dimension of the data region accessed is given by the rank
of the matrix F. The dimension of the space of accesses to the same
location is given by the nullity of F. Iterations whose differences
belong to the null space of F refer to the same array elements.
2.
Iterations that
share self-temporal reuse of an access are separated by vectors in the null
space of F. Self-spatial reuse can be computed similarly by asking when
two iterations use the same row, rather than the same
element. Two accesses Fix + fi and F i 2 + f2 share easily
exploitable locality along the d direction, if d is the
particular solution to the equation Fd = (fi - f2 ). In particular, if d is the direction
corresponding to the innermost loop, i.e., the vector [ 0 , 0 , . . . ,
0,1], then there is spatial locality if the array is stored in row-major form.
3.
The data
dependence problem — whether two references can refer to the same location — is
equivalent to integer linear programming. Two access functions share a data
dependence if there are integer-valued vectors i and i' such that
Bi > 0, B'i' > 0, and Fi + f = F'i' + f.
7. Exercises for Section 11.6
Exercise 1 1 . 6 . 1 : Find the
GCD's of the following sets of integers:
a)
{16,24,56}.
b)
{ -
45,105,240,} .
!
c) {84,105,180,315,350}.
for ( i = 0; i <
10; i++)
A[i] = AClO
- i];
indicate all the
a) True dependences (write followed by read of
the same location).
b)
Antidependences
(read followed by write to the same location).
c)
Output
dependences (write followed by another write to the same loca-tion) .
!
Exercise 11 . 6
. 3: In the box on the
Euclidean algorithm, we made a number of assertions without proof. Prove
each of the following:
a)
The Euclidean
algorithm as stated always works. In particular, gcd(6, c) = gcd(o, 6), where c
is the nonzero remainder of a/b.
b)
gcd(a,&) =
gcd(a, -b).
c)
g c d ( a i , a
2 , . . . ,o„) = gcd(gcd(oi,
a 2 ) , a 3 , a 4 , . . . ,
o n ) for n > 2.
d)
The GCD is
really a function on sets of integers; i.e., order doesn't matter. Show the commutative
law for GCD: gcd(a, b) = gcd(6, a). Then, show the more
difficult statement, the associative law for GCD: gcd(gcd(a, b),c) =
gcd(a,gcd(6, c)). Finally, show that together these laws imply that the GCD of
a set of integers is the same, regardless of the order in which the GCD's of
pairs of integers are computed.
e) If S and T are sets of
integers, then gcd(S U T) = gcd(gcd(S), gcd(T)).
! Exercise 11 . 6 . 4: Find another solution to the second Diophantine equation in Example 11.33.
Exercise 11.6.5 : Apply the independent-variables test in the following
situa-tion. The loop nest is
f o r ( i = 0 ;
i<100; i++)
f o r (j=0;
j<100; j++)
for (k=0; k<100; k++)
and inside the nest is an assignment involving array accesses.
Determine if there are any data dependences due to each of the following
statements:
a) A [ i , j , k ] = A[i+100,j+100,k+100]
.
b) A [ i , j , k ] = A[j+100,k+100,i+100]
.
c) A [ i , j , k
] =
A [ j - 5 0 , k - 5 0 , i - 5 0 ] .
d) A [ i , j , k ] = A [
i + 9 9 , k + 1 0 0 , j ] .
Exercise 11 . 6 . 6: In the two constraints
Exercise 1 1 . 6 . 9
: Apply the loop-residue test to
the following set of constraints:
0 < x < 99 y < x - 100
0<y<99 z<y + 60
0<z<99 x<z + 50
Related Topics