Chapter: Compilers : Principles, Techniques, & Tools : Optimizing for Parallelism and Locality
Basic Concepts of Optimizing for Parallelism and Locality
Basic Concepts
1 Multiprocessors
2 Parallelism in Applications
3 Loop-Level Parallelism
4 Data Locality
5 Introduction to Affine
Transform Theory
This section introduces the basic concepts related to
parallelization and local-ity optimization. If operations can be executed in
parallel, they also can be reordered for other goals such as locality.
Conversely, if data dependences in a program dictate that instructions in a
program must execute serially, there is obviously no parallelism, nor is there
any opportunity to reorder instruc-tions to improve locality. Thus
parallelization analysis also finds the available opportunities for code motion
to improve data locality.
To minimize
communication in parallel code, we group together all related operations and
assign them to the same processor. The resulting code must therefore have data
locality. One crude approach to getting good data locality on a uniprocessor is
to have the processor execute the code assigned to each processor in succession.
In this introduction, we start by presenting an overview of
parallel computer architectures. We then show the basic concepts in
parallelization, the kind of transformations that can make a big difference, as
well as the concepts useful for parallelization. We then discuss how similar
considerations can be used to optimize locality. Finally, we introduce
informally the mathematical concepts used in this chapter.
1. Multiprocessors
The most popular parallel machine architecture is the symmetric multiproces-sor
(SMP). High-performance personal computers often have two processors, and many
server machines have four, eight, and some even tens of processors. Moreover,
as it has become feasible for several high-performance processors to fit on a
single chip, multiprocessors have become even more widely used.
Processors on a symmetric multiprocessor share the
same address space. To communicate, a processor can simply write to a memory
location, which is then read by any other processor. Symmetric multiprocessors
are so named because all processors can access all of the memory in the system
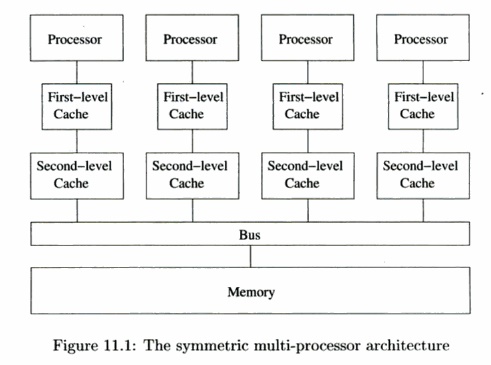
with a uniform access time. Fig. 11.1 shows the high-level architecture of a
multiprocessor. The processors may have their own first-level, second-level,
and in some cases, even a third-level cache. The highest-level caches are
connected to physical memory through typically a shared bus.
Symmetric multiprocessors use a coherent cache protocol to hide
the presence of caches from the programmer.
Under such a protocol, several processors are allowed to keep copies of
the same cache line1 at the same time, provided that they are only reading the
data. When a processor wishes to write to a cache line, copies from all other
caches are removed. When a processor requests data not found in its cache, the
request goes out on the shared bus, and the data will be fetched either from
memory or from the cache of another processor.
The time taken for one processor to communicate with another is
about twice the cost of a memory access. The data, in units of cache lines,
must first be written from the first processor's cache to memory, and then
fetched from the memory to the cache of the second processor. You may think
that interprocessor communication is relatively cheap, since it is only about
twice as slow as a memory access. However, you must remember that memory
accesses are very expensive when compared to cache hits—they can be a hundred
times slower. This analysis brings home the similarity between efficient parallelization
and locality analysis. For a processor to perform well, either on its own or in
the context of a multiprocessor, it must find most of the data it operates on
in its cache.
In the early 2000's, the design of symmetric multiprocessors no
longer scaled beyond tens of processors, because the shared bus, or any other
kind of inter-connect for that matter, could not operate at speed with the
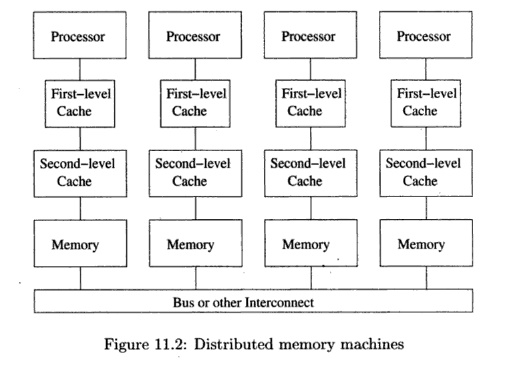
increasing number of processors. To make processor designs scalable, architects
introduced yet an-other level in the memory hierarchy. Instead of having memory
that is equally far away for each processor, they distributed the memories so
that each pro-cessor could access its local memory quickly as shown in Fig.
11.2. Remote memories thus constituted the next level of the memory hierarchy;
they are collectively bigger but also take longer to access. Analogous to the
principle in memory-hierarchy design that fast stores are necessarily small,
machines that support fast interprocessor communication necessarily have a
small number of processors.
There are two variants of a parallel machine with distributed
memories: NUM A (nonuniform memory access) machines and message-passing
machines. NUM A architectures provide a shared address space to the software,
allowing processors to communicate by reading and writing shared memory. On
message-passing machines, however, processors have disjoint address spaces, and
proces-sors communicate by sending messages to each other. Note that even
though it is simpler to write code for shared memory machines, the software
must have good locality for either type of machine to perform well.
2. Parallelism in Applications
We use two high-level metrics to estimate how well
a parallel application will perform: parallelism coverage which is the
percentage of the computation that runs in parallel, granularity of
parallelism, which is the amount of computation that each processor can
execute without synchronizing or communicating with others. One particularly
attractive target of parallelization is loops: a loop may have many iterations,
and if they are independent of each other, we have found a great source of
parallelism.
Amdahl's Law
The significance of parallelism coverage is
succinctly captured by Amdahl's Law.
Amdahl's
Law states that, if / is the
fraction of the code parallelized, and
if the parallelized version runs on a p-processor machine with no communication
or parallelization overhead, the speedup is
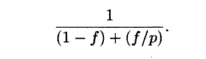
For example, if half of the computation remains sequential, the
computation can only double in speed, regardless of how many processors we use.
The speedup achievable is a factor of 1.6 if we have 4 processors. Even if the
parallelism coverage is 90%, we get at most a factor of 3 speed up on 4
processors, and a factor of 10 on an unlimited number of processors.
Granularity of Parallelism
It is ideal if the entire computation of an application can be
partitioned into many independent coarse-grain tasks because we can simply
assign the differ-ent tasks to different processors. One such example is the
SETI (Search for Extra-Terrestrial Intelligence) project, which is an
experiment that uses home computers connected over the Internet to analyze
different portions of radio telescope data in parallel. Each unit of work,
requiring only a small amount of input and generating a small amount of output,
can be performed indepen-dently of all others. As a result, such a computation
runs well on machines over the Internet, which has relatively high
communication latency (delay) and low bandwidth.
Most applications require more communication and interaction
between pro-cessors, yet still allow coarse-grained parallelism. Consider, for
example, the web server responsible for serving a large number of mostly
independent re-quests out of a common database. We can run the application on a
multi-processor, with a thread implementing the database and a number of other
threads servicing user requests. Other examples include drug design or airfoil
simulation, where the results of many different parameters can be evaluated
independently. Sometimes the evaluation of even just one set of parameters in a
simulation takes so long that it is desirable to speed it up with
paralleliza-tion. As the granularity of available parallelism in an application
decreases, better interprocessor communication support and more programming
effort are needed.
Many long-running scientific and engineering applications, with
their simple control structures and large data sets, can be more readily parallelized
at a finer grain than the applications mentioned above. Thus, this chapter is
devoted pri-marily to techniques that apply to numerical applications, and in
particular, to programs that spend most of their time manipulating data in
multidimensional arrays. We shall examine this class of programs next.
3. Loop-Level Parallelism
Loops are the main target for parallelization,
especially in applications using arrays. Long running applications tend to have
large arrays, which lead to loops that have many iterations, One for each
element in the array. It is not uncommon to find loops whose iterations are
independent of one another. We can divide the large number of iterations of
such loops among the processors. If the amount of work performed in each
iteration is roughly the same, simply dividing the iterations evenly across
processors will achieve maximum paral-lelism. Example 11.1 is an extremely
simple example showing how we can take advantage of loop-level parallelism.
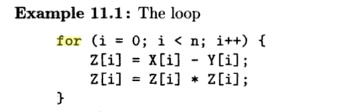
computes the square of diferences between elements
in vectors X and Y and stores it into Z. The loop is
parallelizable because each iteration accesses a different set of data. We can
execute the loop on a computer with M processors by giving each
processor an unique ID p = 0 , 1 , . . . , M - 1 and having each
processor execute the same code:
Task-Level
Parallelism
It is possible to find parallelism outside of iterations in a
loop. For example, we can assign two different function invocations, or two
independent loops, to two processors. This form of parallelism is known as task
parallelism. The task level is not as attractive a source of parallelism as
is the loop level. The reason is that the number of independent tasks is a
constant for each program and does not scale with the size of the data, as does
the number of iterations of a typical loop. Moreover, the tasks generally are
not of equal size, so it is hard to keep all the processors busy all the time.
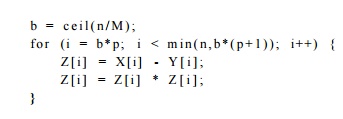
We divide the iterations in the loop evenly among the processors;
the pth processor is given the pth swath of iterations to execute. Note that
the number of iterations may not be divisible by M, so we assure that the last
processor does not execute past the bound of the original loop by introducing a
minimum operation. •
The parallel code shown in Example 11.1 is an SPMD (Single Program
Multiple Data) program. The same code is executed by all processors, but it is
parameterized by an identifier unique to each processor, so different
proces-sors can take different actions. Typically one processor, known as the master,
executes all the serial part of the computation. The master processor, upon
reaching a parallelized section of the code, wakes up all the slave processors. All the processors execute
the parallelized regions of the code. At
the end of each parallelized region of code, all the processors participate in
a barrier synchronization. Any operation executed before a processor enters a
synchro-nization barrier is guaranteed to be completed before any other
processors are allowed to leave the barrier and execute operations that come
after the barrier.
If we parallelize only little loops like those in Example 11.1,
then the re-sulting code is likely to have low parallelism coverage and
relatively fine-grain parallelism. We prefer to parallelize the outermost loops
in a program, as that yields the coarsest granularity of parallelism. Consider,
for example, the appli-cation of a two-dimensional FFT transformation that
operates on an n x n data set. Such a
program performs n FFT's on the rows of the data, then another n FFT's on the
columns. It is preferable to assign each
of the n independent FFT ' s to one processor each, rather than trying to use
several processors to collaborate on one FFT . The code is easier to write, the
parallelism coverage for the algorithm is 100%, and the code has good data
locality as it requires no communication at all while computing an F F T .
Many applications do not have large outermost loops that are
parallelizable. The execution time of these applications, however, is often
dominated by time-consuming kernels, which may have hundreds of lines of
code consisting of loops with different nesting levels. It is sometimes
possible to take the kernel, reorganize its computation and partition it into
mostly independent units by focusing on its locality.
4. Data Locality
There are two somewhat different notions of data locality that
need to be con-sidered when parallelizing programs. Temporal locality
occurs when the same data is used several times within a short time period. Spatial
locality occurs when different data elements that are located near to each
other are used within a short period of time. An important form of spatial
locality occurs when all the elements that appear on one cache line are used
together. The reason is that as soon as one element from a cache line is
needed, all the elements in the same line are brought to the cache and will
probably still be there if they are used soon. The effect of this spatial
locality is that cache misses are minimized, with a resulting important speedup
of the program.
Kernels can often be written in many semantically equivalent ways
but with widely varying data localities and performances. Example 11.2 shows an
alter-native way of expressing the computation in Example 11.1.
Example 11. 2 : Like Example 11.1 the following also finds the
squares of differences between elements in vectors X and Y.
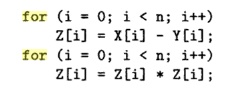
The first loop finds the differences, the second finds the
squares. Code like this appears often in real programs, because that is how we
can optimize a program for vector machines, which are supercomputers
which have instructions that perform simple arithmetic operations on vectors at
a time. We see that the bodies of the two loops here are fused as one in
Example 11.1.
Given that the two programs perform the same computation, which
performs better? The fused loop in Example 11.1 has better performance because
it has better data locality. Each difference is squared immediately, as soon as
it is produced; in fact, we can hold the difference in a register, square it,
and write the result just once into the memory location Z[i]. In
contrast, the code in Example 11.1 fetches Z[i] once, and writes it
twice. Moreover, if the size of the array is larger than the cache, Z1i1
needs to be refetched from memory the second time it is used in this example.
Thus, this code can run significantly slower.
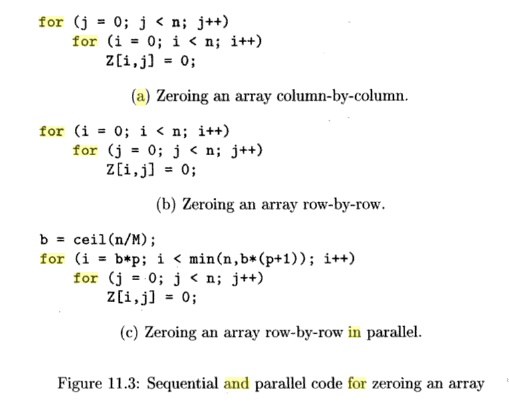
Example 11.3: Suppose we
want to set array Z, stored in row-major
order (recall Section 6.4.3), to all
zeros. Fig. 11.3(a) and
(b) sweeps through the array column-by-column and row-by-row,
respectively. We can transpose the loops in Fig. 11.3(a) to arrive at Fig.
11.3(b). In terms of spatial locality, it is preferable to zero out the array
row-by-row since all the words in a cache line are zeroed consecutively. In the
column-by-column approach, even though each cache line is reused by consecutive
iterations of the outer loop, cache lines will be thrown out before reuse if
the size of a colum is greater than the size of the cache. For best
performance, we parallelize the outer loop of Fig. 11.3(b) in a manner similar
to that used in Example 11.1. •
The two examples above illustrate several important
characteristics associ-ated with numeric applications operating on arrays:
•
Array code
often has many parallelizable loops.
•
When loops have
parallelism, their iterations can be executed in arbitrary
order; they can be
reordered to improve data locality drastically.
•
As we create
large units of parallel computation that are independent of each other,
executing these serially tends to produce good data locality.
5. Introduction to Affine Transform Theory
Writing correct and efficient sequential programs is difficult;
writing parallel programs that are correct and efficient is even harder. The
level of difficulty increases as the granularity of parallelism exploited
decreases. As we see above, programmers must pay attention to data locality to
get high performance. Fur-thermore, the task of taking an existing sequential
program and parallelizing it is extremely hard. It is hard to catch all the
dependences in the program, es-pecially if it is not a program with which we
are familiar. Debugging a parallel program is harder yet, because errors can be
nondeterministic.
Ideally, a parallelizing compiler automatically translates
ordinary sequential programs into efficient parallel programs and optimizes the
locality of these programs. Unfortunately, compilers without high-level
knowledge about the application, can only preserve the semantics of the
original algorithm, which may not be amenable to parallelization. Furthermore,
programmers may have made arbitrary choices that limit the program's
parallelism.
Successes in parallelization and locality optimizations have been
demon-strated for Fortran numeric applications that operate on arrays with
affine accesses. Without pointers and pointer arithmetic, Fortran is easier to
ana-lyze. Note that not all applications have affine accesses; most notably,
many numeric applications operate on sparse matrices whose elements are
accessed indirectly through another array. This chapter focuses on the
parallelization and optimizations of kernels, consisting of mostly tens of
lines.
As illustrated by Examples 11.2 and 11.3, parallelization and
locality op-timization require that we reason about the different instances of
a loop and their relations with each other. This situation is very different
from data-flow analysis, where we combine information associated with all
instances together.
For the problem of optimizing loops with array accesses, we use
three kinds of spaces. Each space can be thought of as points on a grid of one
or more dimensions.
1.
The iteration
space is the set of the dynamic execution instances in a computation, that
is, the set of combinations of values taken on by the loop indexes.
2.
The data
space is the set of array elements accessed.
3.
The processor
space is the set of processors in the system. Normally, these processors
are assigned integer numbers or vectors of integers to distinguish among them.
Given as input are a
sequential order in which the iterations are executed and affine array-access functions (e.g.,
X[iJ + 1])
that specify which
instances in the iteration space access
which elements in the data space.
The output of the optimization, again represented as affine
functions, defines what each processor does and when. To specify what each
processor does, we use an affine function to assign instances in the original
iteration space to processors. To specify when, we use an affine function to
map instances in the iteration space to a new ordering. The schedule is derived
by analyzing the array-access functions for data dependences and reuse
patterns.
The following example will illustrate the three spaces —
iteration, data, and processor. It will also introduce informally the important
concepts and issues that need to be addressed in using these spaces to
parallelize code. The concepts each will be covered in
detail in later sections.
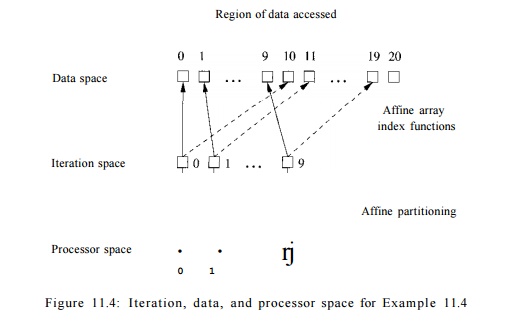
Example 11.4 :
Figure 11.4 illustrates the
different spaces and their relations used in the following program:
float Z[100] ;
for ( i = 0; i < 10; i++)
Z[i+10] = Z [ i ] ;
The three spaces and
the mappings among them are as follows:
1. Iteration Space: The
iteration space is the set of
iterations, whose ID's are given by the values held by the loop
index variables. A d-deep loop nest (i.e.,
d nested loops) has d index variables, and is thus modeled by a G?-dimensional space. The space of iterations is bounded by the lower and upper bounds of the loop indexes. The loop of this example defines a one-dimensional space of 10 iterations,
labeled by the loop index values:
i = 0 , 1 , . . . ,9 .
2. Data Space: The data
space is given directly by the array declarations. In this example, elements in the array are
indexed by a — 0 , 1 , . . . ,99. Even
though all arrays are linearized in a program's address space, we treat n-dimensional arrays as n-dimensional
spaces, and assume that the individual
indexes stay within their bounds. In
this example, the array is
one-dimensional anyway.
3.
Processor Space: We pretend that there are an unbounded number of virtual
processors in the system as our initial parallelization target. The processors
are organized in a multidimensional space, one dimension for each loop in the
nest we wish to parallelize. After parallelization, if we have fewer physical
processors than virtual processors, we divide the vir-tual processors into even
blocks, and assign a block each to a processor.
In this example, we
need only ten processors, one for each iteration of the loop. We assume in Fig.
11.4 that processors are organized in a one-dimensional space and numbered 0 ,
1 , . . . ,9, with loop iteration i assigned to processor i. If
there were, say, only five processors, we could assign it-erations 0 and 1 to
processor 0, iterations 2 and 3 to processor 1, and so on. Since iterations are
independent, it doesn't matter how we do the assignment, as long as each of the
five processors gets two iterations.
4.
Affine Array-Index Function: Each array access in the code specifies a mapping from an
iteration in the iteration space to an array element in the data space. The
access function is affine if it involves multiplying the loop index variables
by constants and adding constants. Both the array index functions i +
10, and i are affine. From the access function, we can tell the dimension
of the data accessed. In this case, since each index function has one loop
variable, the space of accessed array elements is one dimensional.
5.
Affine Partitioning: We parallelize a loop by using an affine function to assign
iterations in an iteration space to processors in the processor space. In our
example, we simply assign iteration i to processor i. We can also
specify a new execution order with affine functions. If we wish to execute the
loop above sequentially, but in reverse, we can specify the ordering function
succinctly with an affine expression 10 — i. Thus, iteration 9 is the
1st iteration to execute and so on.
6.
Region of Data Accessed: To find the best
affine partitioning, it useful to know the region of data accessed by an
iteration. We can get the region of data accessed by combining the iteration
space information with the array index function. In this case, the array access
Z[i + 10] touches the region {a | 10 < a < 20} and
the access Z[i] touches the region {a10 < a < 10}.
7. Data Dependence: To determine if the loop is parallelizable, we ask if there is a data dependence that crosses the boundary of each iteration. For this example, we first consider the dependences of the write accesses in the loop. Since the access function Z[z + 10] maps different iterations to differ-ent array locations, there are no dependences regarding the order in which the various iterations write values to the array. Is there a dependence be-tween the read and write accesses? Since only Z[10], Z[ll],... , Z[19] are written (by the access Z[i + 10]), and only Z[0], Z[l],... , Z[9] are read (by the access Z[i]), there can be no dependencies regarding the relative order of a read and a write. Therefore, this loop is parallelizable. That is, each iteration of the loop is independent of all other iterations, and we can execute the iterations in parallel, or in any order we choose. Notice, however, that if we made a small change, say by increasing the upper limit on loop index i to 10 or more, then there would be dependencies, as some elements of array Z would be written on one iteration and then read 10 iterations later. In that case, the loop could not be parallelized completely, and we would have to think carefully about how iterations were partitioned among processors and how we ordered iterations.
Formulating the problem in terms of multidimensional spaces and affine
mappings between these spaces lets us use standard mathematical techniques to
solve the parallelization and locality optimization problem generally. For
example, the region of data accessed can be found by the elimination of
variables using the Fourier-Motzkin elimination algorithm. Data dependence is
shown to be equivalent to the problem of integer linear programming. Finally,
finding the affine partitioning corresponds to solving a set of linear
constraints. Don't worry if you are not familiar with these concepts, as they
will be explained starting in Section 11.3.
Related Topics