Chapter: Civil : Principles of Solid Mechanics : Stress-Strain Relationships (Rheology)
Simple Viscoelastic Behavior
Simple
Viscoelastic Behavior
All solids are to some extent 'fluid' in that they
will flow, even if only a minuscule amount, at working stress levels if enough
time passes. Thus stress-strain relationships are actually functions of time
(and temperature) and it can be dangerous, even disastrous, to neglect creep
effects in such mate-rials as concrete, plastics, wood, or soil when
dimensional tolerances must be maintained over time.* Moreover, as we might
expect, an increase in temper-ature accelerates viscous flow. All solids turn
into liquids or (gases) at their melting point, but long before that, many
materials such as metals (which appear elastic at room temperature) will loose
stiffness and become viscous** at higher temperatures. Such viscous flow, which
can occur under either iso-tropic or deviatoric stress, is easily confused with
plastic flow which, as we will see, is a purely deviatoric phenomenon. However,
in areas of plastic flow,
(*For example,
time-dependent creep distortion of the concrete in Hoover dam (where the load
is essentially constant) eventually (after forty years), necessitated
replacement of the steel pen-stock liners at great expense. Creep of concrete
and wood can reduce effective prestress signifi-cantly (or destroy shallow
arches) and the long-term deviatoric creep sometimes thought of as secondary
consolidation can, even after hundreds of years, lead to foundation failure as
wit-nessed in the Tower of Pisa.
**The melting point of iron, for example, is 1535 o C
but at only 300 o C it begins to flow under load. That is why
unprotected steel buildings have a lower fire rating (higher insurance
premiums) than concrete or even wooden ones.
)
all distortional
resistance is gone* and there is therefore no deviatoric stiffness. An increase
in temperature will reduce both the deviatoric stiffness and the yield
strength, but it is important to keep the two properties, stiffness and
strength, separate in our minds.
Elastic behavior can be
modified to include viscous effects by combining dashpots with springs to any
degree of complexity deemed necessary to cap-ture the essential stiffness
response observed in the laboratory. The simplest such 'models' for
viscoelastic behavior combine a single spring and a single dashpot either in
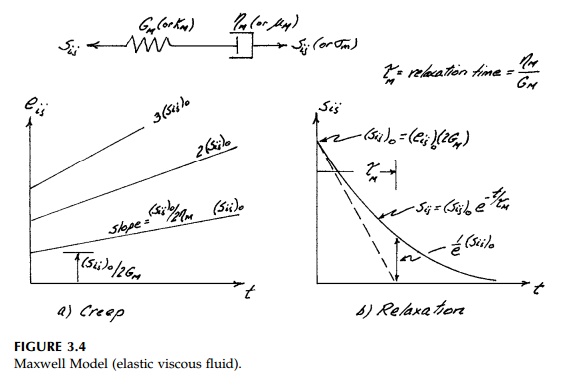
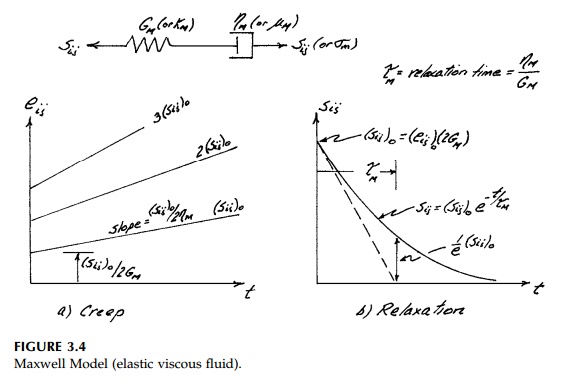
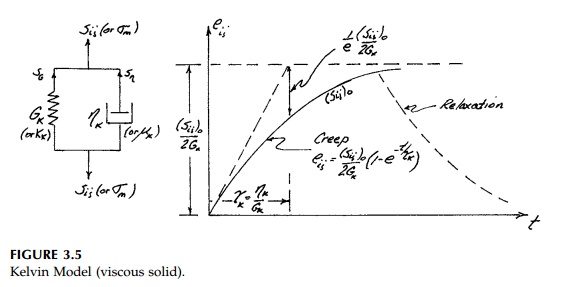
series or in parallel. The corresponding 'Maxwell Model' and 'Kelvin Model' are
shown in Figures 3.4 and 3.5. In general a separate model may be necessary to
depict the observed isotropic and deviatoric behav-ior. This is true, for
example, in saturated clays where the volumetric behavior is well represented
by a Kelvin model and the deviatoric response by the Maxwell model. The
viscoelastic deformation of most solids, however, exhibits much more flow under
shear than mean stress. Thus we will discuss the various vis-coelastic models
in terms of deviatoric stress and the corresponding distor-tional strain,
recognizing that similar models can apply to volumetric behavior
with ![]() m,
m, ![]() m,
3K, and 3
m,
3K, and 3![]() substituted in place
of Sij, eij, 2G, and 2
substituted in place
of Sij, eij, 2G, and 2![]() .
.
Since in this book we consider only static loads,
the viscoelastic creep (and relaxation) behavior of our models is of primary
importance. For many struc-tures, particularly large ones like bridges or the
foundations on which they sit, the major part of the stress field in service is
due to constant 'dead' loads
anyway. Moreover, even
when live loads from wind, temperature changes, earthquakes, or traffic are
significant and generate important stress fields, little viscous flow will
occur since dashpots cannot react to sudden loads of short duration.* Thus, it
is generally a reasonable engineering assumption for viscoelastic solids to
calculate live-load stresses from the purely elastic response of the material
and the viscous strains from the dead-load part of the stress field neglecting
the comparatively transitory effects.**
The creep curves for the Maxwell and Kelvin models
are shown in Figures 3.4 and 3.5. In each case the derivation of the
fundamental stress-strain equation from equilibrium and compatibility is
straightforward. For the Maxwell model with the spring and dashpot in series,
the stress in each component equals the total applied stress, Sij,
and the total deviatoric strain is the sum of that in each. Therefore, the
general equation for the deviatoric Maxwell model is
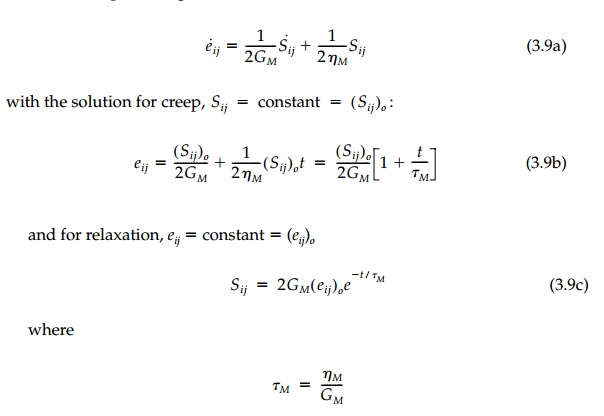
As can be seen in
Figure 3.4, the Maxwell model is essentially a fluid. Although it responds
elastically and appears to be solid, it flows indefi-nitely under sustained
stress. Silly putty is a perfect example of such a material.
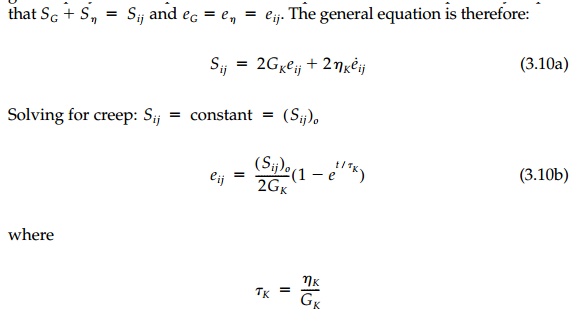
The Kelvin* model where the components are in
parallel (Figure 3.5) is, on the other hand, a solid with the dashpot only
serving to delay the elastic response. In this case the stress in each
component depends on time with the dashpot taking all the stress at t =
0 and the spring only able to accept the stress given up by the dashpot as it
strains. Equilibrium and compatibility require
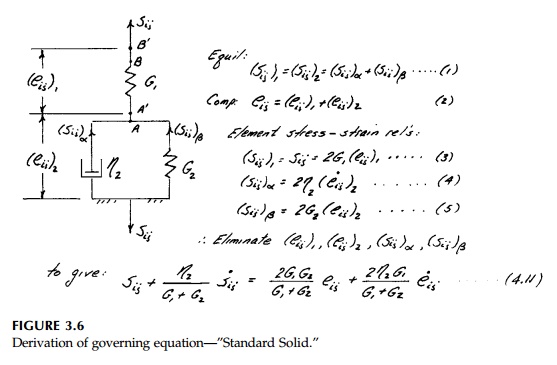
More complicated models can be developed to depict
viscoelastic behavior to any degree of sophistication. To illustrate the
procedure for determining the basic equations for such hybrid models, the
derivation for the 'standard solid' is shown as an example in Figure 3.6 while
others are left for home-work problems.
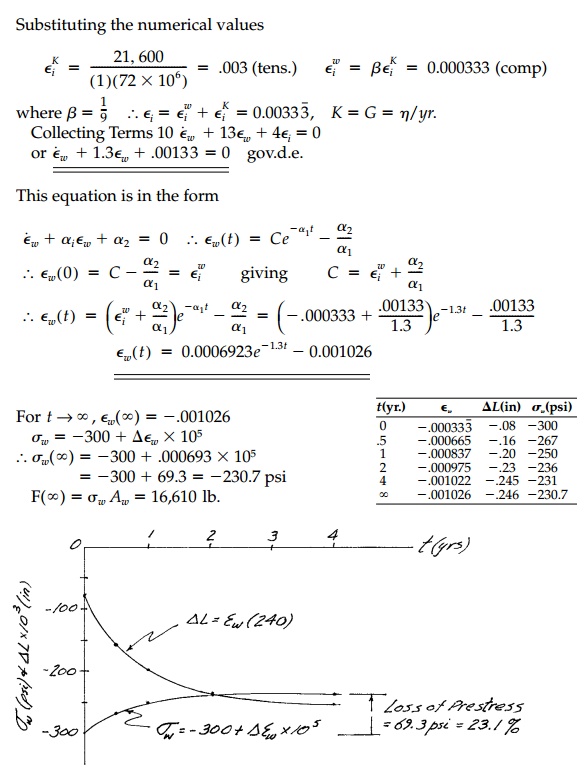
Example 3.2
A six-inch thick wooden
bridge deck is post-tensioned with 1 in.2 Kevlar tendons with a 1 ft
spacing jacked to an initial prestressing force F 21,600 lb as shown.
Kevlar can be considered elastic ( E=7.2 x
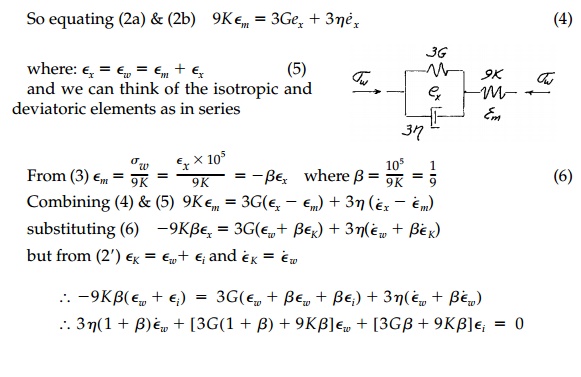
106 psi), but wood might be an elastic material in isotropic stress
and a Kelvin material in deviatoric stress with properties as shown.
Calculate and plot the stress in the wood and the
change in length ![]() L
as a function of time.
L
as a function of time.
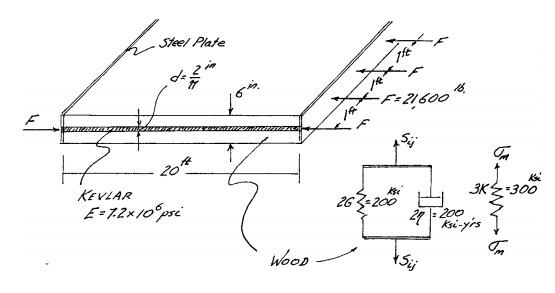
Note:
a)We
are concerned only with stress and strain in x direction.
Assume both wood and Kevlar are free to expand in y
and z directions.

Related Topics