Chapter: Civil : Principles of Solid Mechanics : Stress-Strain Relationships (Rheology)
Fitting Laboratory Data with Viscoelastic Models
Fitting
Laboratory Data with Viscoelastic Models
Properties of
viscoelastic materials are usually determined in the laboratory with a creep
test run at constant temperature. Often a tensile test is used with
mea-surements of axial and transverse deformations as a function of time to
deter-mine E(t) and v(t). It is
better (often necessary) to run separate creep tests in pure states of constant
isotropic and deviatoric stress to determine K(t) and G(t)
indi-vidually, since for some linear viscoelastic materials, the elastic
relationships between E, v, G, and K
do not translate directly when they are functions of time.
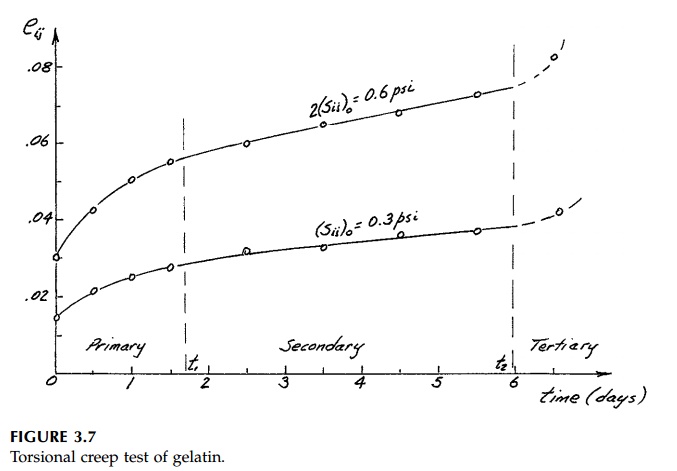
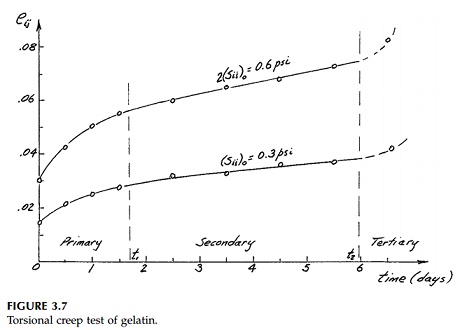
Typical results that were obtained in the laboratory
for the creep of gelatin* (in this case a mixture of 10% gelatin, 50% glycerin,
and 40% water) in pure shear at room temperature are shown in Figure 3.7. One
might decide to fit such curves with a least-squares polynomial, but it is much
better, since it is physical and leads to easier mathematics, to combine linear
springs and dashpots. As we have seen for the Maxwell, Kelvin, and standard
solid models, this leads to a differential equation for the behavior of a
particular arrange-ment of springs and dashpots of the form:
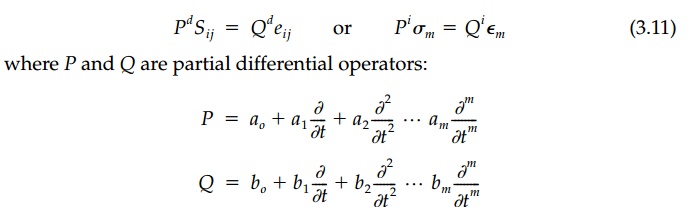
with the coefficients ai and bi,
various combinations of Gi and ![]() i
in the devia-toric case (i.e., for Pd and Qd),
or Ki and
i
in the devia-toric case (i.e., for Pd and Qd),
or Ki and ![]() i
for the isotropic case (i.e., for Pi and Qi).
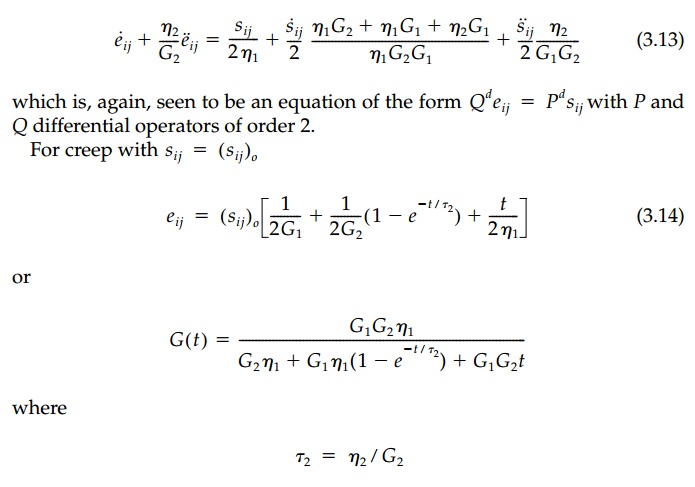
Thus we can derive time dependent moduli:
i
for the isotropic case (i.e., for Pi and Qi).
Thus we can derive time dependent moduli:

A combination of either
n Maxwell models in parallel or n Kelvin models in series with a
simple Maxwell model can represent observed linear vis-coelastic behavior to
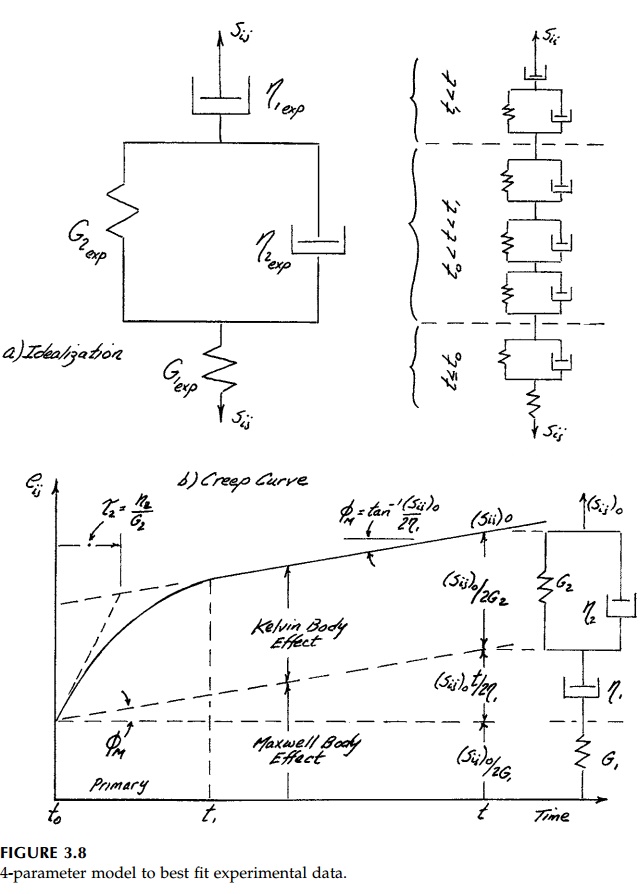
any degree of accuracy desired. However, a 4-parameter model (Burger body)
shown in Figure 3.8 will generally capture the funda-mentals of the viscoelastic
response with sufficient accuracy for most engi-neering purposes. The
deformation at the first time reading, t to , is modeled by a
spring and primary behavior, to <
t < t1, by a single Kelvin body. The
contribution of each element is shown in Figure 3.8. Time t1
is chosen to be where, by eye, the creep curve plotted from the experimental
data appears to become a straight line at the angle ![]() M.
The initial tangent to the curve at t=to is drawn and
M.
The initial tangent to the curve at t=to is drawn and ![]() 2
determined as shown.
2
determined as shown.
The basic equation for the 4-parameter model is:
From t1, ![]() 2, and
2, and ![]() M
as found from the experimental curve drawn by eye to best fit the laboratory
data, the element parameters G1, G2,
M
as found from the experimental curve drawn by eye to best fit the laboratory
data, the element parameters G1, G2, ![]() ,
, ![]() 2
can be com-puted. If, as in Figure 3.6, the experiment indicates that bonds
begin to weaken at large strains, this tertiary behavior can be represented by
plastic elements such as those discussed later.
2
can be com-puted. If, as in Figure 3.6, the experiment indicates that bonds
begin to weaken at large strains, this tertiary behavior can be represented by
plastic elements such as those discussed later.
Related Topics