Chapter: Civil : Principles of Solid Mechanics : Stress-Strain Relationships (Rheology)
Elastic Viscoelastic Analogy
Elastic-Viscoelastic
Analogy
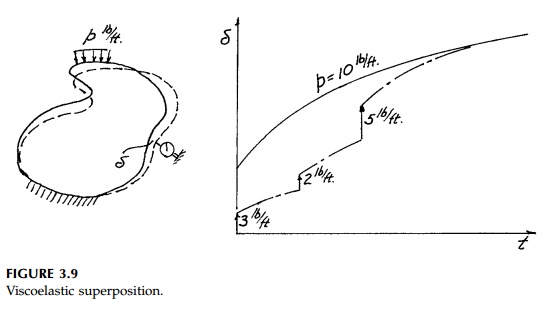
One of the most important characteristics of linear
viscoelastic 'mechanical' models used to represent time-dependent material
behavior is that such models obey Boltzmann's superposition principle
illustrated in Figure 3.9.
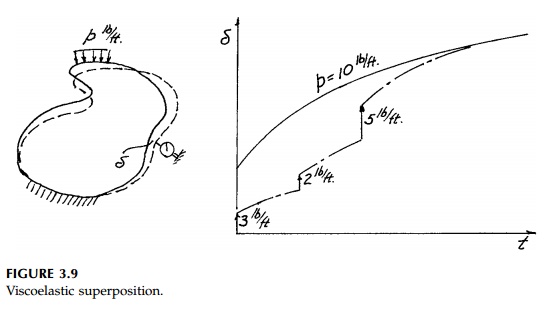
The long-term creep
deformation due to a loading, p, equals the sum of the deformations due
to increments of p applied sequentially.
Superposition (with
linearity), in turn, allows direct correspondence to elastic theory. If a
solution to an elastic boundary value problem can be obtained, it can be
transposed to a solution for a viscoelastic material imme-diately or by using
Laplace transforms.
There
are three general situations in linear elasticity:
1.The stress field is a function of only the
boundary conditions, geometric shape, and loading, which are constant, i.e.,

2. The
stress field is a function of material properties (volumetric and deviatoric
stiffnesses) as well, i.e.,

3. The loads are time dependent, i.e.,

If the elastic solution
is of the first type (as it is in the two-dimensional, homogeneous, isotropic
situation) then there really is no problem; viscoelas-tic stresses will be the
same as elastic stresses and time-dependent strains and displacements are
obtained directly using G(t) and K(t) in the
stress-strain relationships. In addition, Laplace transforms can sometimes be
avoided in the second case for special fields, but in general it is more
satisfactory to apply transform methods.* In the third situation when the
loading is dynamic, Laplace transforms must be used. This may be straightforward
theoretically,** but very difficult in practice since the solution in the
transformed domain, where time is eliminated as a variable in both the load and
the moduli, must be referred back to the real world. The inverse mapping
function to do this is seldom found in standard tables, except in the simplest
cases, and may be very difficult to determine from complex variables.
The main point in all
this, however, is that there is a general elastic-viscoelastic analogy.
Thus the simple elastic idealization is all important. When we talk about 'elastic'
field theory, requirements for uniqueness and/or existence, strategy and
tactics of elastic analysis, and procedures for closed-form and numerical
solution for elastic problems, we are talking about far more than is implied by
the word, 'elastic.' The introduction of time as a variable through linear
viscos-ity (and/or loads that change with time) makes the mathematics much more
involved, but the formulation directly corresponds to elasticity. Thus there is
no real need to differentiate linearly viscoelastic materials from linear
elastic mate-rials in a fundamental way, or consider the two separately
hereafter.
Moreover, simple
elastic analysis is the basic ingredient for nonlinear anal-ysis by numerical
methods. Nonlinear or temperature-dependent material properties (and geometric
nonlinearity due to large finite strains***) intro-duce difficulties so severe
that a closed-form solution becomes intractable.
Field equations incorporating each or all of these
nonlinear effects can be for-mulated, but they are so complicated that it is,
today, a waste of time to even try to solve them. Instead, all types of
nonlinearity can be handled satisfactorily to any degree of accuracy with a
piecewise linear approximation if a powerful enough computer is available. The
loads are increased incrementally and the material properties adjusted. If
necessary, the geometry is revised after each step before the elastic solution
is again used for the next increment.
Related Topics