Chapter: Mobile Computing
Reservation based Schemes
RESERVATION
BASED SCHEMES
Polling
Polling
is the process where the computer or controlling device waits for an external
device to check for its readiness or state, often with low-level hardware. For
example, when a printer is connected via a parallel port, the computer waits
until the printer has received the next character. These processes can be as
minute as only reading one bit.
Polling
is sometimes used synonymously with busy-wait polling. In this situation, when
an I/O operation is required, the computer does nothing other than check the
status of the I/O device until it is ready, at which point the device is
accessed. In other words, the computer waits until the device is ready. Polling
also refers to the situation where a device is repeatedly checked for
readiness, and if it is not, the computer returns to a different task. Although
not as wasteful of CPU cycles as busy waiting, this is generally not as
efficient as the alternative to polling, interrupt-driven I/O.
In a
simple single-purpose system, even busy-wait is perfectly appropriate if no
action is possible until the I/O access, but more often than not this was
traditionally a consequence of simple hardware or non-multitasking operating
systems. Polling is often intimately involved with very low-level hardware. For
example, polling a parallel printer port to check whether it is ready for
another character involves examining as little as one bit of a byte.
That bit
represents, at the time of reading, whether a single wire in the printer cable
is at low or high voltage. The I/O instruction that reads this byte directly
transfers the voltage state of eight real world wires to the eight circuits
(flip flops) that make up one byte of a CPU register. Polling has the
disadvantage that if there are too many devices to check, the time required to
poll them can exceed the time available to service the I/O device. ≠
Algorithm
Polling
can be described in following steps:
1. The host repeatedly reads the busy bit of
the controller until it becomes clear.
2. When clear, the host writes in the
command register and writes a byte into the data-out register.
3. The host sets the command-ready bit (set
to 1).
4. When the controller senses command-ready
bit is set, it sets busy bit.
5. The controller reads the command register
and since write bit is set, it performs necessary I/O operations on the device.
If the read bit is set to one instead of write bit, data from device is loaded
into data-in register, which is further read by the host.
6. The controller clears the command-ready
bit once everything is over, it clears error bit to show successful operation
and reset busy bit (0).
Types
A polling cycle is the time in which each element is monitored
once. The optimal polling cycle will vary according to several factors,
including the desired speed of response and the overhead (e.g., processor time
and bandwidth) of the polling.
In roll call polling, the polling device or process queries each
element on a list in a fixed sequence. Because it waits for a response from
each element, a timing mechanism is necessary to prevent lock-ups caused by
non-responding elements. Roll call polling can be inefficient if the overhead
for the polling messages is high, there are numerous elements to be polled in
each polling cycle and only a few elements are active.
In hub polling, also referred to as token polling, each element
polls the next element in some fixed sequence. This continues until the first
element is reached, at which time the polling cycle starts all over again.
Polling can be employed in various computing contexts in order
to control the execution or transmission sequence of the elements involved. For
example, in multitasking operating systems, polling can be used to allocate
processor time and other resources to the various competing processes. In
networks, polling is used to determine which nodes want to access the network.
It is also used by routing protocols to retrieve routing information, as is the
case with EGP (exterior gateway protocol).
An alternative to polling is the use of interrupts, which are
signals generated by devices or processes to indicate that they need attention,
want to communicate, etc. Although polling can be very simple, in many
situations (e.g., multitasking operating systems) it is more efficient to use
interrupts because it can reduce processor usage and/or bandwidth consumption.
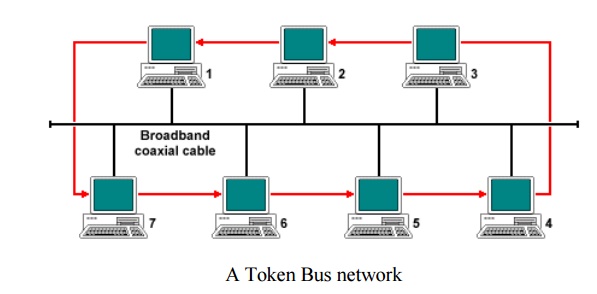
Token Bus
Token Bus
is described in the IEEE 802.4 specification, and is a Local Area Network (LAN)
in which the stations on the bus or tree form a logical ring. Each station is
assigned a place in an ordered sequence, with the last station in the sequence
being followed by the first, as shown below. Each station knows the address of
the station to its "left" and "right" in the sequence.
This type
of network, like a Token Ring network, employs a small data frame only a few
bytes in size, known as a token, to grant individual stations exclusive access
to the network transmission medium. Token-passing networks are deterministic in
the way that they control access to the network, with each node playing an
active role in the process. When a station acquires control of the token, it is
allowed to transmit one or more data frames, depending on the time limit
imposed by the network.
When the
station has finished using the token to transmit data, or the time limit has
expired, it relinquishes control of the token, which is then available to the
next station in the logical sequence. When the ring is initialised, the station
with the highest number in the sequence has control of the token. The physical
topology of the network is either a bus or a tree, although the order in which
stations are connected to the network is not important.
The
network topology means that we are essentially dealing with a broadcast
network, and every frame transmitted is received by all attached stations. With
the exception of broadcast frames, however, frames will only be read by the
station to which they are addressed, and ignored by all other stations. As the
token frame is transmitted, it carries the destination address of the next
station in the logical sequence. As each individual station is powered on, it
is allocated a place in the ring sequence (note that in the diagram above,
station two is not participating in the ring). The Token Bus medium access
control protocol allows stations to join the ring or leave the ring on an ad-hoc
basis. Token Bus networks were conceived to meet the needs of automated
industrial manufacturing systems and owe much to a proposal by General Motors
for a networking system to be used in their own manufacturing plants
-Manufacturing Automation Protocol (MAP).
Ethernet
was not considered suitable for factory automation systems because of the
contention-based nature of its medium access control protocol, which meant that
the length of time a station might have to wait to send a frame was
unpredictable. Ethernet also lacked a priority system, so there was no way to
ensure that more important data would not be held up by less urgent traffic.
A token-passing system in which each station takes turns to transmit a frame was considered a better option, because if there are n stations, and each station takes T seconds to send a frame, no station has to wait longer than T seconds to acquire the token. The ring topology of existing token-passing systems, however, was not such an attractive idea, since a break in the ring would cause a general network failure.
A ring topology was also considered to be incompatible with the linear topology of assembly-line or process control systems. Token Bus was a hybrid system that provided the robustness and linearity of a bus or tree topology, whilst retaining the known worst-case performance of a token-passing medium access control method. The transmission medium most often used for broadband Token Bus networks is 75 Ohm coaxial cable (the same type of cable used for cable TV), although alternative cabling configurations are available. Both single and dual cable systems may be used, with or without head-ends.
Related Topics