Chapter: Civil Surveying : GPS Surveying
GPS Surveying
GPS SURVEYING
INTRODUCTION
Traditional methods of surveying and navigation
resort to tedious field and astronomical observation for deriving positional
and directional information. Diverse field conditions, seasonal variation and
many unavoidable circumstances always bias the traditional field approach.
However, due to rapid advancement in electronic systems, every aspect of human
life is affected to a great deal. Field of surveying and navigation is
tremendously benefited through electronic devices. Many of the critical
situations in surveying/navigation are now easily and precisely solved in short
time.
Astronomical observation of celestial bodies was
one of the standard methods of obtaining coordinates of a position. This method
is prone to visibility and weather condition and demands expert handling.
Attempts have been made by USA since early 1960's to use
space based artificial satellites. System TRANSIT was widely used for
establishing a network of control points over large regions. Establishment of
modern geocentric datum and its relation to local datum was successfully
achieved through TRANSI T. Rapid improvements in higher frequently transmission
and precise clock signals along with advanced stable satellite technology have
been instrumental for the development of global positioning system.
The NAVSTAR GPS (Navigation
System with Time and Ranging Global Positioning System) is a satellite based
radio navigation system providing precise three- dimensional position, course
and time information to suitably equipped user.
GPS has been under development in
the USA since 1973. The US department of Defence as a worldwide navigation and
positioning resource for military as well as civilian use for 24 hours and all
weather conditions primarily developed it.
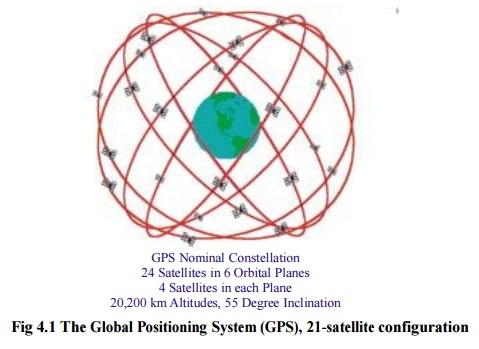
In its final configuration, NAVSTAR GPS consists
of 21 satellites (plus 3 active spares) at an altitude of 20200 km above the
earth's surface
(Fig. 1). These satellites are so arranged in orbits to have atleast four
satellites visible above the horizon anywhere on the earth, at any time of the
day. GPS Satellites transmit at frequencies L1=1575.42 MHz and L2=1227.6 MHz
modulated with two types of code viz. P-code and C/A code and with navigation
message. Mainly two types of observable are of interest to the user. In pseudo
ranging the distance between the satellite and the GPS receiver plus a small
corrective
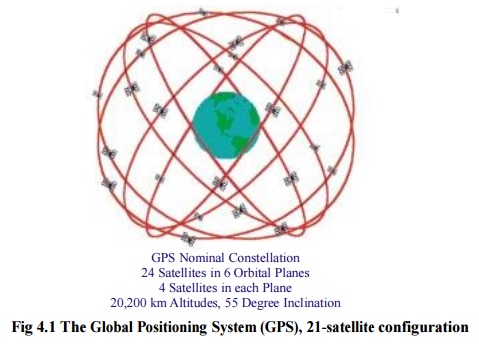
Fig 4.1
The Global Positioning System (GPS), 21-satellite configuration
term for receiver clock error is
observed for positioning whereas in carrier phase techniques, the difference
between the phase of the carrier signal transmitted by the satellite and the
phase of the receiver oscillator at the epoch is observed to derive the precise
information.
The GPS satellites act as reference points from
which receivers on the ground detect their position. The fundamental navigation
principle is based on the measurement of pseudoranges between the user and four
satellites (Fig.)
2). Ground stations precisely monitor the orbit of every satellite and by
measuring the travel time of the signals transmitted from the satellite four
distances between receiver and satellites will yield accurate position,
direction and speed. Though three-range
measurements are sufficient, the fourth
observation is essential for
solving clock synchronization
error between receiver and satellite. Thus, the term 'pseudoranges' is
derived. The secret of GPS measurement is due to the ability of measuring
carrier phases to about 1/100 of a cycle equaling to 2 to 3 mm in linear
distance. Moreover the high frequency L1 and L2 carrier signal can easily
penetrate the ionosphere to reduce its effect. Dual frequency observations are
important for large station separation and for eliminating most of the error
parameters.
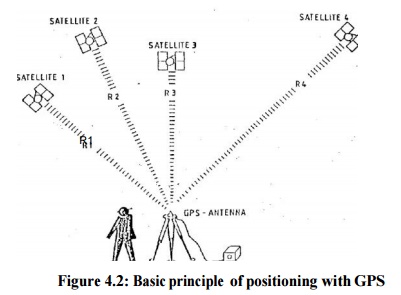
Figure
4.2: Basic principle of positioning with GPS
There has been significant
progress in the design and miniaturization of stable clock. GPS satellite
orbits are stable because of the high altitudes and no atmosphere drag.
However, the impact of the sun and moon on GPS orbit though significant, can be
computed completely and effect of solar radiation pressure on the orbit and
tropospheric delay of the signal have been now modeled to a great extent from
past experience to obtain precise information for various applications.
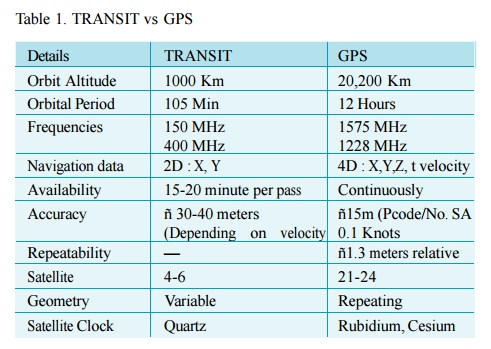
Comparison of main characteristics of TRANSIT and
GPS re veal technological advancement in the field of space based positioning
system (Table1).
GPS has been designed to provide navigational
accuracy of �1 0 m to �15 m. However, sub meter accuracy in differential mode
has been achieved and it has been proved that broad varieties of problems in
geodesy and geodynamics can be tackled through GPS.
Versatile use of GPS for a
civilian need in following fields have been successfully practiced viz.
navigation on land, sea, air, space, high precision kinematics survey on the
ground, cadastral surveying, geodetic control network densification, high precision
aircraft positioning, photogrammetry without ground control, monitoring
deformations, hydrographic surveys, active control survey and many other
similar jobs related to navigation and positioning,. The outcome of a typical
GPS survey includes geocentric position accurate to 10 m and relative positions
between receiver locations to centimeter level or better.
Related Topics