Chapter: Civil Surveying : GPS Surveying
GPS Surveying: Correctable Errors
CORRECTABLE ERRORS
Sources of correctable errors
include satellite clock, ephemeris data and ionosphere and tropospheric delay.
If implemented, SA may also cause a correctable positioning error. Clock errors
and ephemeris errors originate with the GPS satellite. A clock error is a
slowly changing error that appears as a bias on the pseudorange measurement
made by a receiver. An ephemeris error is a residual error in the data used by
a receiver to locate a satellite in space.
Ionosphere delay errors and
tropospheric delay errors are caused by atmospheric conditions. Ionospheric
delay is caused by the density of electrons in the ionosphere along the signal
path. A tropspheric delay is related to humidity, temperature, and altitude
along the signal path. Usually, a tropospheric error is smaller than an
ionospheric error.
Another correctable error is
caused by SA which is used by U.SDepartment of Defence to introduce errors into
Standard Positioning Service (SPS) GPS signals to degrade fix accuracy.
The amount of error and direction
of the error at any given time does not change rapidly. Therefore, two GPS
receivers that are sufficiently close together will observe the same fix error,
and the size of the fix error can be determined.
NON-CORRECTABLE ERRORS
Non-correctable errors cannot be
correlated between two GPS receivers that are located in the same general area.
Sources of non-correctable errors include receiver noise, which is unavoidably
inherent in any receiver, and multipath errors, which are environmental.
Multi-path errors are caused by the receiver 'seeing'
reflections of signals that have bounced off of surrounding objects. The
sub-meter antenna is multipath-resistant; its use is required when logging
carrier phase data. Neither error can be eliminated with differential, but they
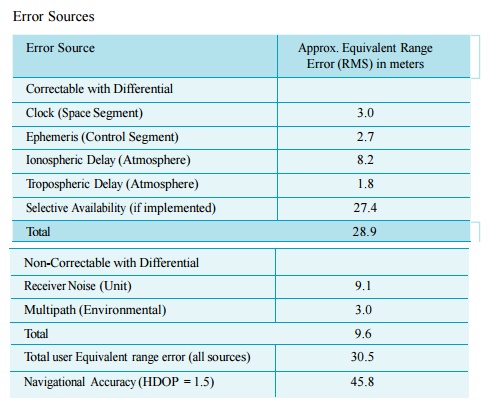
can be reduced substantially with position fix averaging. The error sources and
the approximate RMS error range are given in the Table.
Error Sources
Related Topics