Chapter: Civil Surveying : GPS Surveying
Basic Concept of GPS Receiver and Its Components
BASIC CONCEPT
OF GPS RECEIVER AND ITS COMPONENTS
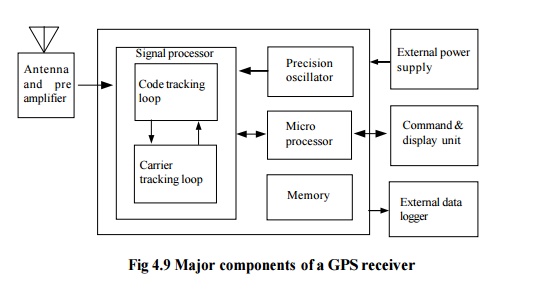
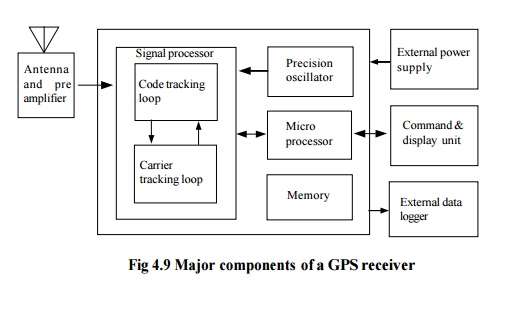
The main
components of a GPS receiver are shown in Fig. 10. These are:
-
Antenna with pre-amplifier
-
RF section with signal identification and signal
processing
-
Micro-processor for receiver control, data
sampling and data processing
-
Precision oscillator
-
Power supply
-
User interface, command and display panel
-
Memory, data storage
ANTENNA
Sensitive antenna of the GPS
receiver detects the electromagnetic wave signal transmitted by GPS satellites
and converts the wave energy to electric current] amplifies the signal strength
and sends them to receiver electronics.
Several types of GPS antennas in
use are mostly of following types (Fig.).
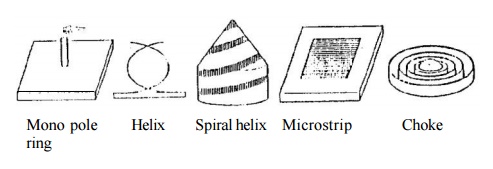
Mono pole Helix Spiral helix Microstrip Choke ring
Types of
GPS Antenna
-
Mono pole or dipole
-
Quadrifilar helix (Volute)
-
Spiral helix
-
Microstrip (patch)
-
Choke ring
Microstrip antennas are most
frequently used because of its added advantage for airborne application,
materialization of GPS receiver and easy construction. However, for geodetic
needs, antennas are designed to receive both carrier frequencies L1 and L2.
Also they are protected against multipath by extra ground planes or by using
choke rings. A choke ring consists of strips of conductor which are concentric
with the vertical axis of the antenna and connected to the ground plate which
in turns reduces the multipath effect.
RF Section with Signal Identification and Processing
The incoming GPS signals are down
converted to a lower frequency in the RS section and processed within one or
more channels. Receiver channel is the primary electronic unit of a GPS
receiver. A receiver may have one or more channels. In the parallel channel
concept each channel is continuouslymfranking one particular satellite. A
minimum of four parallel channels is required to determine position and time.
Modern receivers contain upto 12 channels for each frequency.
In the sequencing channel concept
the channel switches from satellite to satellite at regular interval. A single
channel receiver takes atleast four times of 30 seconds to establish first
position fix, though some receiver types have a dedicated channel for reading
the data signal. Now days in most of the cases fast sequencing channels with a
switching rate of about one-second per satellite are used.
In multiplexing channel,
sequencing at a very high speed between different satellites is achieved using
one or both frequencies. The switching rate is synchronous with the navigation
message of 50 bps or 20 milliseconds per bit. A complete sequence with four
satellites is completed by 20 millisecond or after 40 millisecond for dual
frequency receivers. The navigation message is continuous, hence first fix is
achieved after about 30 seconds.
Though continuous tracking
parallel channels are cheap and give good overall performance, GPS receivers
based on multiplexing technology will soon be available at a cheaper price due
to electronic boom.
Microprocessor
` To control the operation of a
GPS receiver, a microprocessor is essential for acquiring the signals,
processing of the signal and the decoding of the broadcast message. Additional
capabilities of computation of on-line position and velocity, conversion into a
given local datum or the determination of waypoint information are also
required. In future more and more user relevant software will be resident on
miniaturized memory chips.
Precision Oscillator
A reference frequency in the
receiver is generated by the precision oscillator. Normally, less expensive,
low performance quartz oscillator is used in receivers since the precise clock
information is obtained from the GPS satellites and the user clock error can be
eliminated through double differencing technique when all participating
receivers observe at exactly the same epoch. For navigation with two or three
satellites only an external high precision oscillator is used.
Power Supply
First generation GPS receivers
consumed very high power, but modern receivers are designed to consume as
little energy as possible. Most receivers have an internal rechargeable.
Nickel-Cadmium battery in addition to an external power input. Caution of low
battery signal prompts the user to ensure adequate arrangement of power supply.
Memory Capacity
For port processing purposes all
data have to be stored on internal or external memory devices. Post processing
is essential for multi station techniques applicable to geodatic and surveying
problems. GPS observation for pseudoranges, phase data, time and navigation
message data have to be recorded. Based on sampling rate, it amount to about
1.5 Mbytes of data per hour for six satellites and 1 second data for dual
frequency receivers. Modern receivers have internal memories of 5 Mbytes or
more. Some receivers store the data on magnetic tape or on a floppy disk or
hard-disk using external microcomputer connected through RS-232 port.
Most modern receivers have a
keypad and a display for communication between the user and the receivers. The
keypad is used to enter commands, external data like station number or antenna
height or to select a menu operation. The display indicates computed
coordinates, visible satellites, data quality indices and other suitable
information. Current operation software packages are menu driven and very user
friendly.
Related Topics