Chapter: Computer Graphics and Multimedia
Two dimensional viewing
Two dimensional viewing
Two dimensional viewing The
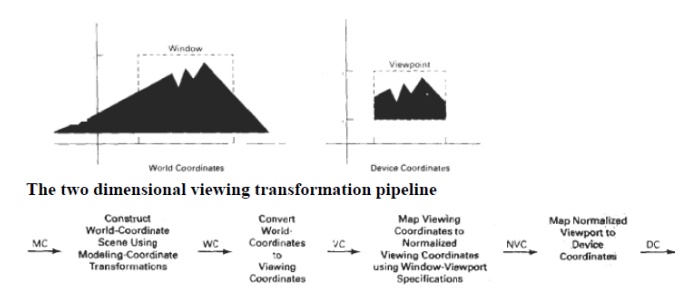
viewing pipeline A world coordinate area selected for display is called a window. An area on a display
device to which a window is mapped is called a view port. The window defines
what is to be viewed the view port defines where it is to be displayed. The
mapping of a part of a world coordinate scene to device coordinate is referred
to as viewing transformation. The two d imensional viewing transformation is
referred to as window to view port transformation of windowing transformation.
A viewing transformation using
standard rectangles for the window and viewport
The
viewing transformation in several steps, as indicated in Fig. First, we
construct the scene in world coordinates using the output primitives. Next to
obtain a particular orientation for the window, we can set up a two-dimensional
viewing-coordinate system in the world coordinate plane, and define a window in
the viewing-coordinate system. The viewing- coordinate reference frame is used
to provide a method for setting up arbitrary orientations for rectangular
windows.
Once the
viewing reference frame is established, we can transform descriptions in world
coordinates to viewing coordinates. We then define a viewport in normalized
coordinates (in the range from 0 to 1) and map the viewing-coordinate
description of the scene to normalized coordinates.
At the
final step all parts of the picture that lie outside the viewport are clipped,
and the contents of the viewport are transferred to device coordinates. By
changing the position of the viewport, we can view objects at different
positions on the display area of an output device.
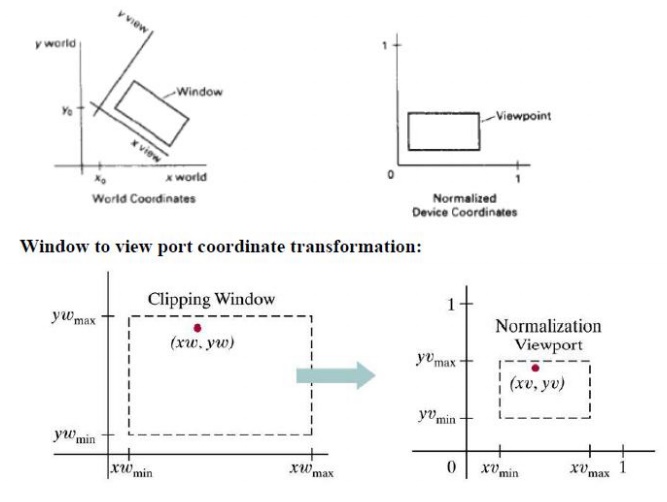
A point
at position (xw,yw) in a designated window is mapped to viewport coordinates
(xv,yv) so that relative positions in the two areas are the same. The figure
illustrates the window to view port mapping. A point at position (xw,yw) in the
window is mapped into position (xv,yv) in the associated view port. To maintain
the same relative placement in view port as in window The conversion is
performed with the following sequence of transformations.
1. Perform a
scaling transformation using point position of (xw min, yw min) that scales the
window area to the size of view port.
2. Translate
the scaled window area to the position of view port. Relative proportions of
objects are maintained if scaling factor are the same(Sx=Sy).
Otherwise
world objects will be stretched or contracted in either the x or y direction
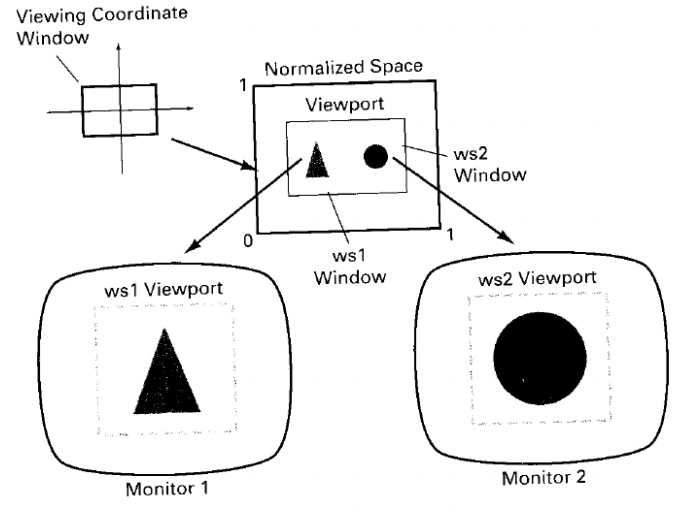
when displayed on output device. For normalized coordinates, object
descriptions are mapped to various display devices. Any number of output
devices can be open in particular application and another window view port
transformation can be performed for each open output device. This mapping
called the work station transformation is accomplished by selecting a window
area in normalized apace and a view port are in coordinates of display device.
Mapping selected parts of a scene in normalized
coordinate to different video monitors with work station transformation.
Window to Viewport transformation
The
window defined in world coordinates is first transformed into the normalized
device coordinates. The normalized window is then transformed into the viewport
coordinate. The window to viewport coordinate transformation is known as
workstation transformation. It is achieved by the following steps
1. The
object together with its window is translated until the lower left corner of
the window is at the orgin.
2. Object
and window are scaled until the window has the dimensions of the viewport
3. Translate
the viewport to its correct position on the screen.
The
relation of the window and viewport display is expressed as XV-XVmin XW-XWmin
--------------
= ----------------
XVmax-XVmin
XWmax-XWmin
YV-Yvmin
YW-YWmin
--------------
= ----------------
YVmax-YVmin
YWmax-YWmin
XV=XVmin
+ (XW-XWwmin)Sx
YV=YVmin
+ (YW-YWmin)Sy
XVmax-XVmin
Sx=
--------------------
XWmax-Xwmin
YVmax-YVmin
Sy=
--------------------
YWmax-YWmin
2D Clipping
The procedure
that identifies the portion of a picture that are either inside or outside of a
specified regin of space is referred to as clipping. The regin against which an
object is to be clipped is called a clip window or clipping window.
The
clipping algorithm determines which points, lines or portions of lines lie
within the clipping window. These points, lines or portions of lines are
retained for display. All other are discarded. Possible clipping are
1. Point
clipping
2. Line
clipping
3. Area
clipping
4. Curve Clipping
5. Text
Clipping
Point Clipping:
The
points are said to be interior to the clipping if XWmin <= X <=XW max
YWmin
<= Y <=YW max
The equal
sign indicates that points on the window boundary are included within the
window.
Line Clipping:
- The lines
are said to be interior to the clipping window, if the two end points of the
lines are interior to the window.
- If the
lines are completely right of, completely to the left of, completely above, or
completely below the window, then it is discarded.
- Both end
points of the line are exterior to the window, then the line is partially
inside and partially outside the window.The lines which across one or more
clipping boundaries requires calculation of multiple intersection points to
decide the visible portion of them.To minimize the intersection calculation and
increase the efficiency of the clipping algorithm, initially completely visible
and invisible lines are identified and then intersection points are calculated
for remaining lines.
There are
many clipping algorithms. They are
1.Sutherland and cohen subdivision line clipping
algorithm
It is
developed by Dan Cohen and Ivan Sutharland. To speed up the processing this
algorithm performs initial tests that reduces the number of intersections that
must be calculated.
given a
line segment, repeatedly:
1. check for
trival acceptance both
2. check for
trivial rejection
both
endpoints of the same side of clip rectangle 3. both endpoints outside clip
rectangle
Divide
segment in two where one part can be trivially rejected
Clip
rectangle extended into a plane divided into 9 regions . Each region is defined
by a unique 4-bit string
·
left bit = 1: above top edge (Y > Ymax)
·
2nd bit = 1: below bottom edge (Y < Ymin)
·
3rd bit = 1: right of right edge (X > Xmax)
·
right bit = 1: left of left edge (X < Xmin)
·
left bit = sign bit of (Ymax - Y)
·
2nd bit = sign bit of (Y - Ymin)
·
3rd bit = sign bit of (Xmax - X)
·
right bit = sign bit of (X - Xmin)
(The sign
bit being the most significant bit in the binary representation of the value.
This bit is '1' if the number is negative, and '0' if the number is positive.)
The frame
buffer itself, in the center, has code 0000. 1001 | 1000 | 1010
-------------------------
0001 |
0000 | 0010
-------------------------
0101 |
0100 | 0110 For each line segment:
1. each end
point is given the 4-bit code of its region
2. repeat
until acceptance or rejection
1. if both
codes are 0000 -> trivial acceptance
2. if
logical AND of codes is not 0000 -> trivial rejection
3. divide
line into 2 segments using edge of clip rectangle
1. find an
endpoint with code not equal to 0000
2. lines
that cannot be identified as completely inside or outside are checked for the
intersection with two boundaries.
3. break the
line segment into 2 line segments at the crossed edge
4. forget
about the new line segment lying completely outside the clip rectangle
5. draw the
line segment which lies within the boundary regin.
2. Mid point subdivision algorithm
If the
line partially visible then it is subdivided in two equal parts. The visibility
tests are then applied to each half. This subdivision process is repeated until
we get completely visible and completely invisible line segments.
Mid point
sub division algorithm
1. Read two
end points of the line P1(x1,x2), P2(x2,y2)
2. Read two
corners (left top and right bottom) of the window, say (Wx1,Wy1 and Wx2, Wy2)
3. Assign
region codes for two end points using following steps
Initialize
code with bits 0000 Set Bit 1 – if ( x < Wx1 ) Set Bit 2 – if ( x > Wx1 )
Set Bit 3 – if ( y < Wy1)
Set Bit 4
– if ( y > Wy2)
4. Check
for visibility of line
a. If region
codes for both endpoints are zero then the line is completely visible. Hence
draw the line and go to step 6.
b. If the
region codes for endpoints are not zero and the logical ANDing of them is also nonzero
then the line is completely invisible, so reject the line and go to step6
c. If region
codes for two end points do not satisfy the condition in 4a and 4b the line is
partially visible.
5. Divide
the partially visible line segments in equal parts and repeat steps 3 through 5
for both subdivided line segments until you get completely visible and
completely invisible line segments.
6. Stop.
This
algorithm requires repeated subdivision of line segments and hence many times
it is slower than using direct calculation of the intersection of the line with
the clipping window edge.
3. Liang-Barsky line clipping algorithm
The cohen
Sutherland clip algorithm requires the large no of intesection
calculations.here this is reduced. The update parameter requires only one
division and windows intersection lines are computed only once.
The
parameter equations are given as
X=x1+u x, Y=Y1 + u y
0<=u<=1, where x =x2-x1 , u y=y2-y1
Algorithm
1. Read the
two end points of the line p1(x,y),p2(x2,y2)
2. Read the
corners of the window (xwmin,ywmax), (xwmax,ywmin)
3. Calculate
the values of the parameter p1,p2,p3,p4 and q1,q2,q3,q4m such that
4. p1= x q1=x1-xwmin
p2= - x q2=xwmax-x1 p3= y q3=y1-ywmin p4= - y q4=ywmax-y1
5. If
pi=0 then that line is parallel to the ith boundary. if qi<0 then the line
is completely outside the boundary. So discard the linesegment and and goto
stop.
Else
{
Check
whether the line is horizontal or vertical and check the line endpoint with the
corresponding boundaries. If it is within the boundary area then use them to
draw a line. Otherwise use boundary coordinate to draw a line. Goto stop.
}
6. initialize
values for U1 and U2 as U1=0,U2=1
7. Calculate
the values forU= qi/pi for I=1,2,3,4
8. Select
values of qi/pi where pi<0 and assign maximum out of them as u1
9. If
(U1<U2)
{
Calculate
the endpoints of the clipped line as follows XX1=X1+u1 x
XX2=X1+u
2 x YY1=Y1+u1 y YY2=Y1+u 2 y
}
10.Stop.
4. Nicholl-lee Nicholl line clipping
It
Creates more regions around the clip window. It avoids multiple clipping of an
individual line segment. Compare with the previous algorithms it perform few
comparisons and divisions . It is applied only 2 dimensional clipping. The
previous algorithms can be extended to 3 dimensional clipping.
1. For the
line with two end points p1,p2 determine the positions of a point for 9
regions. Only three regions need to be considered (left,within boundary, left
upper corner).
2. If p1
appears any other regions except this, move that point into this region using
some reflection method.
3. Now
determine the position of p2 relative to p1. To do this depends on p1 creates
some new region.
a. If
both points are inside the region save both points.
b. If p1
inside , p2 outside setup 4 regions. Intersection of appropriate boundary is
calculated depends on the position of p2.
c. If p1 is
left of the window, setup 4 regions . L, Lt,Lb,Lr
1. If p2 is
in region L, clip the line at the left boundary and save this intersection to
p2.
2. If p2 is
in region Lt, save the left boundary and save the top boundary.
3. If not
any of the 4 regions clip the entire line.
d. If p1
is left above the clip window, setup 4 regions . T, Tr,Lr,Lb 1. If p2 inside
the region save point.
2. else
determine a unique clip window edge for the intersection calculation.
e. To
determine the region of p2 compare the slope of the line to the slope of the
boundaries of the clip regions.
Line clipping using non rectangular clip window
Circles
and other curved boundaries clipped regions are possible, but less commonly
used. Clipping algorithm for those curve are slower.
1. Lines
clipped against the bounding rectangle of the curved clipping region. Lines
outside the region is completely discarded.
2. End
points of the line with circle center distance is calculated . If the squre of
the 2 points less than or equal to the radious then save the line else
calculate the intersection point of the line.
Polygon clipping
Splitting the concave polygon
It uses
the vector method , that calculate the edge vector cross products in a counter
clock wise order and note the sign of the z component of the cross products. If
any z component turns out to be negative, the polygon is concave and we can
split it along the line of the first edge vector in the cross product pair.
Sutherland – Hodgeman polygon Clipping Algorithm
1. Read the
coordinates of all vertices of the polygon.
2. Read the
coordinates of the clipping window.
3. Consider
the left edge of the window.
4. Compare
the vertices of each edge of the polygon, Individually with the clipping plane.
5. Save the
resulting intersections and vertices in the new list of vertices according to
four possible relationships between the edge and the clipping boundary
discussed earlier.
6. Repeats
the steps 4 and 5 for remaining edges of the clipping window. Each time the
resultant vertices is successively passed the next edge of the clipping window.
7. Stop.
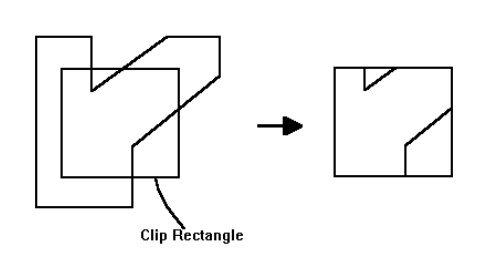
The
Sutherland –Hodgeman polygon clipping algorithm clips convex polygons
correctly, But in case of concave polygons clipped polygon may be displayed
with extraneous lines. It can be solved by separating concave polygon into two
or more convex polygons and processing each convex polygons separately.
The
following example illustrates a simple case of polygon clipping.
WEILER –Atherton Algorithm
Instead
of proceding around the polygon edges as vertices are processed, we sometime
wants to follow the window boundaries.For clockwise processing of polygon
vertices, we use the following rules.
- For an
outside to inside pair of vertices, follow the polygon boundary.
- For an
inside to outside pair of vertices, follow a window boundary in a clockwise
direction.
Curve Clipping
It
involves non linear equations. The boundary rectangle is used to test for
overlap with a rectangular clipwindow. If the boundary rectangle for the object
is completely inside the window , then save the object (or) discard the
object.If it fails we can use the coordinate extends of individual quadrants
and then octants for preliminary testing before calculating curve window
intersection.
Text Clipping
The
simplest method for processing character strings relative to a window boundary
is to use the all or none string clipping strategy. If all the string is inside
then accept it else omit it.
We
discard only those character that are not completely inside the window. Here
the boundary limits of individual characters are compared to the window.
Exterior clipping
The
picture part to be saved are those that are outside the region. This is
referred to as exterior clipping. An application of exterior clipping is in
multiple window systems.
Objects
within a window are clipped to the interior of that window. When other higher
priority windows overlap these objects , the ojects are also clipped to the
exterior of the overlapping window.
Related Topics