Chapter: Computer Graphics and Multimedia
Three Dimensional Object Representations
Three Dimensional Object
Representations
Representation
schemes for solid objects are divided into two categories as follows: 1.
Boundary Representation ( B-reps)
It
describes a three dimensional object as a set of surfaces that separate the
object interior from the environment. Examples are polygon facets and spline
patches.
2. Space
Partitioning representation
It
describes the interior properties, by partitioning the spatial region
containing an object into a set of small, nonoverlapping, contiguous
solids(usually cubes). Eg: Octree Representation.
Polygon Surfaces
Polygon
surfaces are boundary representations for a 3D graphics object is a set of
polygons that enclose the object interior.
Polygon Tables
The
polygon surface is specified with a set of vertex coordinates and associated
attribute parameters.
For each
polygon input, the data are placed into tables that are to be used in the
subsequent processing.
Polygon
data tables can be organized into two groups: Geometric tables and attribute tables.
Geometric Tables Contain vertex coordinates and
parameters to identify the spatial orientation of the polygon surfaces.
Attribute tables Contain attribute information for
an object such as parameters specifying the
degree of transparency of the object and its surface reflectivity and
texture characteristics. A convenient organization for storing geometric data
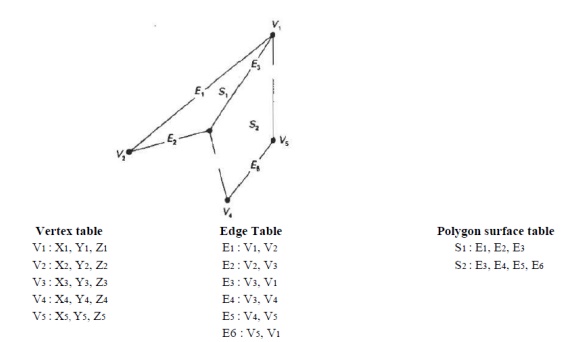
is to create three lists:
1. The
Vertex Table
Coordinate
values for each vertex in the object are stored in this table. 2. The Edge
Table
It
contains pointers back into the vertex table to identify the vertices for each
polygon edge. 3. The Polygon Table
It contains pointers back into the edge table to identify the edges for each polygon. This is shown in fig
Listing
the geometric data in three tables provides a convenient reference to the
individual components (vertices, edges and polygons) of each object.
The
object can be displayed efficiently by using data from the edge table to draw
the component lines.
Extra
information can be added to the data tables for faster information extraction.
For instance, edge table can be expanded to include forward points into the
polygon table so that common edges between polygons can be identified more
rapidly.
E1 : V1,
V2, S1
E2 : V2,
V3, S1
E3 : V3,
V1, S1, S2
E4 : V3,
V4, S2
E5 : V4,
V5, S2
E6 : V5,
V1, S2
is useful
for the rendering procedure that must vary surface shading smoothly across the
edges from one polygon to the next. Similarly, the vertex table can be expanded
so that vertices are cross-referenced to corresponding edges.
Additional
geometric information that is stored in the data tables includes the slope for
each edge and the coordinate extends for each polygon. As vertices are input,
we can calculate edge slopes and we can scan the coordinate values to identify
the minimum and maximum x, y and z values for individual polygons.
The more
information included in the data tables will be easier to check for errors.
Some of the tests that could be performed by a graphics package are:
1. That
every vertex is listed as an endpoint for at least two edges.
2. That
every edge is part of at least one polygon.
3. That
every polygon is closed.
4. That each
polygon has at least one shared edge.
5. That if
the edge table contains pointers to polygons, every edge referenced by a
polygon pointer has a reciprocal pointer back to the polygon.
Plane Equations:
To
produce a display of a 3D object, we must process the input data representation
for the object through several procedures such as,
- Transformation
of the modeling and world coordinate descriptions to viewing coordinates.
- Then to
device coordinates:
- Identification
of visible surfaces
- The
application of surface-rendering procedures.
For these
processes, we need information about the spatial orientation of the individual
surface components of the object. This information is obtained from the vertex
coordinate value and the equations that describe the polygon planes.
The
equation for a plane surface is Ax + By+ Cz + D = 0 ----(1)
Where (x,
y, z) is any point on the plane, and the coefficients A,B,C and D are constants
describing the spatial properties of the plane.
We can
obtain the values of A, B,C and D by solving a set of three plane equations
using the coordinate values for three non collinear points in the plane.
For that,
we can select three successive polygon vertices (x1, y1, z1), (x2, y2, z2) and
(x3, y3, z3) and solve the following set of simultaneous linear plane equations
for the ratios A/D, B/D and C/D.
(A/D)xk +
(B/D)yk + (c/D)zk = -1, k=1,2,3 -----(2)
The
solution for this set of equations can be obtained in determinant form, using
Cramer’s rule as

Expanding the determinants , we can write the calculations for the plane coefficients in the form:
A = y1 (z2 –z3 ) + y2(z3 –z1 ) + y3 (z1 –z2 )
B = z1
(x2 -x3 ) + z2 (x3 -x1 ) + z3 (x1 -x2 )
C = x1
(y2 –y3 ) + x2 (y3 –y1 ) + x3 (y1 -y2 )
D = -x1
(y2 z3 -y3 z2 ) - x2 (y3 z1 -y1 z3 ) - x3 (y1 z2 -y2 z1) ------(4)
As vertex
values and other information are entered into the polygon data structure,
values for A, B, C and D are computed for each polygon and stored with the
other polygon data.
Plane
equations are used also to identify the position of spatial points relative to
the plane surfaces of an object. For any point (x, y, z) hot on a plane with
parameters A,B,C,D, we have
Ax + By +
Cz + D ≠ 0
We can
identify the point as either inside or outside the plane surface according o
the sigh (negative or positive) of Ax + By + Cz + D:
If Ax +
By + Cz + D < 0, the point (x, y, z) is inside the surface. If Ax + By + Cz
+ D > 0, the point (x, y, z) is outside the surface.
These
inequality tests are valid in a right handed Cartesian system, provided the
plane parmeters A,B,C and D were calculated using vertices selected in a
counter clockwise order when viewing the surface in an outside-to-inside
direction.
Polygon Meshes
A single
plane surface can be specified with a function such as fillArea. But when object surfaces are to be tiled, it is more
convenient to specify the surface facets with a mesh function. One type of
polygon mesh is the triangle strip.A
triangle strip formed with 11 triangles connecting 13 vertices.

This
function produces n-2 connected triangles given the coordinates for n vertices.
Another
similar function in the quadrilateral
mesh, which generates a mesh of (n-1) by (m-1) quadrilaterals, given the
coordinates for an n by m array of vertices. Figure shows 20 vertices forming a
mesh of 12 quadrilaterals.

Curved Lines and Surfaces Displays
of three dimensional curved lines and surface can be generated from an input set of mathematical functions defining the
objects or from a set of user specified data points. When functions are
specified, a package can project the defining equations for a curve to the
display plane and plot pixel positions along the path of the projected
function. For surfaces, a functional description in decorated to produce a
polygon-mesh approximation to the surface.
Spline Representations A Spline
is a flexible strip used to produce a smooth curve through a designated set of points. Several
small weights are distributed along the length of the strip to hold it in
position on the drafting table as the curve is drawn.
The Spline curve refers to any sections
curve formed with polynomial sections satisfying specified continuity
conditions at the boundary of the pieces.
A Spline surface can be described with
two sets of orthogonal spline curves. Splines are used in graphics applications
to design curve and surface shapes, to digitize drawings for computer storage,
and to specify animation paths for the objects or the camera in the scene. CAD
applications for splines include the design of automobiles bodies, aircraft and
spacecraft surfaces, and ship hulls.
Interpolation and Approximation Splines Spline
curve can be specified by a set of coordinate positions called control
points which indicates the general shape of the curve. These control points
are fitted with piecewise continuous parametric polynomial functions in one of
the two ways. 1. When polynomial sections are fitted so that the curve passes
through each control point the resulting curve is said to interpolate the set of control points.
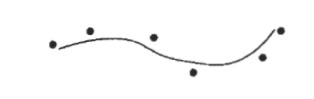
A set of six control points interpolated with
piecewise continuous polynomial sections

1. When
the polynomials are fitted to the general control point path without
necessarily passing through any control points, the resulting curve is said to approximate the set of control points.
A set of six control points approximated with
piecewise continuous polynomial sections
Interpolation
curves are used to digitize drawings or to specify animation paths.
Approximation curves are used as design tools to structure object surfaces. A
spline curve is designed , modified and manipulated with operations on the
control points.The curve can be translated, rotated or scaled with transformation
applied to the control points. The convex polygon boundary that encloses a set
of control points is called the convex
hull. The shape of the convex hull is to imagine a rubber band stretched
around the position of the control points so that each control point is either
on the perimeter of the hull or inside it. Convex
hull shapes (dashed
lines) for two sets of control points
Parametric Continuity Conditions
For a
smooth transition from one section of a piecewise parametric curve to the next
various continuity conditions are
needed at the connection points.
If each
section of a spline in described with a set of parametric coordinate functions
or the form x = x(u), y = y(u), z = z(u), u1<= u <= u2 -----(a)
We set parametric continuity by matching the
parametric derivatives of adjoining curve sections at their common boundary.
Zero order parametric continuity referred
to as C0 continuity, means that the curves meet. (i.e) the values of x,y, and z evaluated at u2 for the first curve
section are equal. Respectively, to the value of x,y, and z evaluated at u1 for
the next curve section.
First order parametric continuity referred
to as C1 continuity means that the first parametric derivatives of the coordinate functions in equation (a) for two
successive curve sections are equal at their joining point.
Second order parametric continuity, or C2
continuity means that both the first and second parametric derivatives of the two curve sections are equal at
their intersection.
Higher
order parametric continuity conditions are defined similarly.
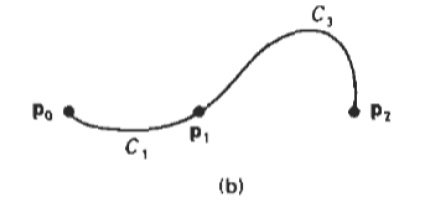
Piecewise construction of a curve by joining two
curve segments using different orders of continuity
a)Zero order continuity only

b)First order continuity only

c) Second order continuity only

Geometric Continuity Conditions
To
specify conditions for geometric continuity is an alternate method for joining
two successive curve sections.
The
parametric derivatives of the two sections should be proportional to each other
at their common boundary instead of equal to each other.
Zero
order Geometric continuity referred as G0 continuity means that the two curves
sections must have the same coordinate position at the boundary point.
First
order Geometric Continuity referred as G1 continuity means that the parametric
first derivatives are proportional at the interaction of two successive
sections.
Second
order Geometric continuity referred as G2 continuity means that both the first
and second parametric derivatives of the two curve sections are proportional at
their boundary. Here the curvatures of two sections will match at the joining
position.
Three
control points fitted with two curve sections joined with a) parametric
continuity
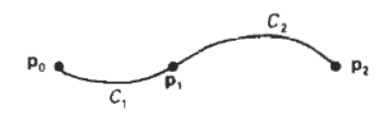
b)geometric continuity where the tangent vector of
curve C3 at point p1 has a greater magnitude than the tangent vector of curve
C1 at p1.
Spline specifications There are
three methods to specify a spline representation:
1. We can
state the set of boundary conditions that are imposed on the spline; (or)
2. We can
state the matrix that characterizes the spline; (or)
3. We can
state the set of blending functions
that determine how specified geometric constraints on the curve are combined to
calculate positions along the curve path.
To
illustrate these three equivalent specifications, suppose we have the following
parametric cubic polynomial representation for the x coordinate along the path
of a spline section.
x(u)=axu3
+ axu2 + cxu + dx 0<= u <=1 ----------(1) Boundary conditions for this
curve might be set on the endpoint coordinates x(0) and x(1) and on the
parametric first derivatives at the endpoints x’(0) and x’(1). These boundary
conditions are sufficient to determine the values of the four coordinates ax,
bx, cx and dx. From the boundary conditions we can obtain the matrix that
characterizes this spline curve by first rewriting eq(1) as the matrix product
where U
is the row matrix of power of parameter u and C is the coefficient column
matrix. Using equation (2) we can write the boundary conditions in matrix form
and solve for the coefficient matrix C as
C = Mspline
. Mgeom -----(3) Where Mgeom in a four element column matrix containing the
geometric constraint values on the spline and Mspline in the 4 * 4 matrix that
transforms the geometric constraint values to the polynomial coefficients and
provides a characterization for the spline curve.
Matrix
Mgeom contains control point coordinate values and other geometric constraints.
We can substitute the matrix representation for C into equation (2) to obtain.
x (u) = U
. Mspline . Mgeom ------(4)
The
matrix Mspline, characterizing a spline representation, called the basis matriz is useful for transforming
from one spline representation to another.
Finally
we can expand equation (4) to obtain a polynomial representation for coordinate
x in terms of the geometric constraint parameters.
x(u) = Σ gk. BFk(u) where gk are the
constraint parameters, such as the control point coordinates and slope of the
curve at the control points and BFk(u) are the polynomial blending functions.
Related Topics