Chapter: Computer Graphics and Multimedia
Animation
Animation
Computer
animation refers to any time sequence of visual changes in a scene.
Computer
animations can also be generated by changing camera parameters such as
position, orientation and focal length.
Applications
of computer-generated animation are entertainment, advertising, training and
education.
Example : Advertising
animations often transition one object shape into another.
Frame-by-Frame animation
Each
frame of the scene is separately generated and stored. Later, the frames can be
recoded on film or they can be consecutively displayed in "real-time
playback" mode
Design of Animation Sequences
An animation sequence in designed with the
following steps: o Story board layout
o Object definitions
·
Key-frame specifications
Story Board:
Generation
of in-between frames.
The story
board is an outline of the action.
It
defines the motion sequences as a set of basic events that are to take place.
Depending
on the type of animation to be produced, the story board could consist of a set
of rough sketches or a list of the basic ideas for the motion.
Object Definition
An object
definition is given for each participant in the action.
Objects
can be defined in terms of basic shapes such as polygons or splines.
The
associated movements of each object are specified along with the shape.
Key frame
A key
frame is detailed drawing of the scene at a certain time in the animation
sequence.
Within
each key frame, each object is positioned according to the time for that frame.
Some key
frames are chosen at extreme positions in the action; others are spaced so that
the time interval between key frames is not too much.
In-betweens
In
betweens are the intermediate frames between the key frames.
The
number of in between needed is determined by the media to be used to display
the animation.
Film
requires 24 frames per second and graphics terminals are refreshed at the rate
of 30 to 60 frames per seconds.
Time
intervals for the motion are setup so there are from 3 to 5 in-between for each
pair of
key frames.
Depending
on the speed of the motion, some key frames can be duplicated. For a 1 min film
sequence with no duplication, 1440 frames are needed.
Other
required tasks are
Motion
verification
Editing
Production
and synchronization of a sound track.
General Computer Animation Functions
Steps in
the development of an animation sequence are,
Object
manipulation and rendering
Camera
motion
Generation
of in-betweens
Animation
packages such as wave front provide special functions for designing the animation
and processing individuals objects.
Animation
packages facilitate to store and manage the object database.
Object
shapes and associated parameter are stored and updated in the database.
Motion
can be generated according to specified constraints using 2D and 3D
transformations.
Standard
functions can be applied to identify visible surfaces and apply the rendering
algorithms.
Camera
movement functions such as zooming, panning and tilting are used for motion
simulation.
Given the
specification for the key frames, the in-betweens can be automatically
generated.
Raster Animations
On raster
systems, real-time animation in limited applications can be generated using
raster operations.
Sequence
of raster operations can be executed to produce real time animation of either
2D or 3D objects.
We can
animate objects along 2D motion paths using the color-table transformations.
Predefine
the object as successive positions along the motion path, set the successive
blocks of pixel values to color table entries.
Set the
pixels at the first position of the object to „on‟ values, and set the pixels
at the other object positions to the background color.
The
animation is accomplished by changing the color table values so that the object
is „on‟ at successive positions along the animation path as the preceding
position is set to the background intensity.
Computer Animation Languages
Animation
functions include a graphics editor, a key frame generator and standard
graphics routines.
The graphics
editor allows designing and modifying object shapes, using spline surfaces,
constructive solid geometry methods or other representation schemes.
Scene
description includes the positioning of objects and light sources defining the
photometric parameters and setting the camera parameters.
Action
specification involves the layout of motion paths for the objects and camera.
Keyframe
systems are specialized animation languages designed dimply to generate the
in-betweens from the user specified keyframes.
Parameterized
systems allow object motion characteristics to be specified as part of the
object definitions. The adjustable parameters control such object
characteristics as degrees of freedom motion limitations and allowable shape
changes.
Scripting
systems allow object specifications and animation sequences to be defined with
a user input script. From the script, a library of various objects and motions
can be constructed.
Keyframe Systems
Each set
of in-betweens are generated from the specification of two keyframes.
For
complex scenes, we can separate the frames into individual components or
objects called cells, an acronym from cartoon animation.
Morphing
Transformation
of object shapes from one form to another is called Morphing.
Morphing
methods can be applied to any motion or transition involving a change in shape.
The example is shown in the below figure.
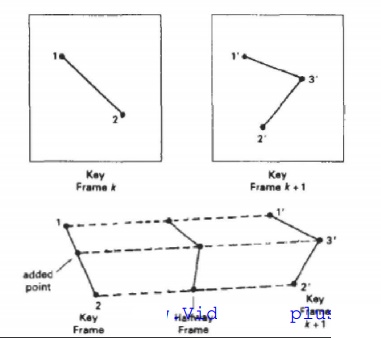
Suppose
we equalize the edge count and parameters Lk and Lk+1
denote the number of line segments in two consecutive frames. We define,
Lmax
= max (Lk, Lk+1)
Lmin
= min(Lk , Lk+1)
Ne = Lmax
mod Lmin
Ns
= int (Lmax/Lmin)
The
preprocessing is accomplished by
§ Dividing
Ne edges of keyframemin into Ns+1 section.
§ Dividing
the remaining lines of keyframemin into Ns sections.
For
example, if Lk = 15 and Lk+1 = 11, we divide 4 lines of
keyframek+1 into 2 sections each. The remaining lines of keyframek+1
are left infact.
If the
vector counts in equalized parameters Vk and Vk+1 are
used to denote the number of vertices in the two consecutive frames. In this
case we define
Vmax = max(Vk,Vk+1),
Vmin = min( Vk,Vk+1) and
Nls
= (Vmax -1) mod (Vmin – 1)
Np = int ((Vmax – 1)/(Vmin
– 1 ))
Preprocessing
using vertex count is performed by
§ Adding Np
points to Nls line section of keyframemin.
§ Adding Np-1
points to the remaining edges of keyframemin.
Simulating Accelerations
Curve-fitting
techniques are often used to specify the animation paths between key frames.
Given the vertex positions at the key frames, we can fit the positions with
linear or nonlinear paths. Figure illustrates a nonlinear fit of key-frame
positions. This determines the trajectories for the in-betweens. To simulate
accelerations, we can adjust the time spacing for the in-betweens.
For
constant speed (zero acceleration), we use equal-interval time spacing for the
in-betweens. Suppose we want n in-betweens for key frames at times t1 and t2.
The time
interval between key frames is then divided into n + 1 subintervals, yielding
an in-between spacing of
∆=
t2-t1/n+1
we can
calculate the time for any in-between as
tBj =
t1+j ∆t, j = 1,2, . . . . . . n
Motion Specification
These are several ways in which the motions of
objects can be specified in an animation system.
Direct Motion Specification
Here the
rotation angles and translation vectors are explicitly given.
Then the
geometric transformation matrices are applied to transform coordinate
positions.
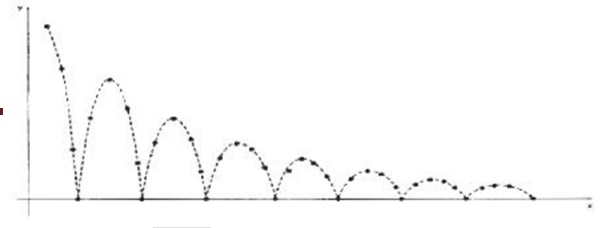
We can approximate the path of a bouncing ball with a damped, rectified,
sine curve
y (x) = A
/ sin(ωx + θ0) /e-kx
where A
is the initial amplitude, ω is the angular frequency, θ0 is the
phase angle and k is the damping constant.
Related Topics