Chapter: Special Electrical Machines : Permanent Magnet Synchronous Motor
Permissible Torque-Speed Characteristics - Permanent Magnet Synchronous Motor
PERMISSIBLE TORQUE-SPEED
CHARACTERISTICS
The
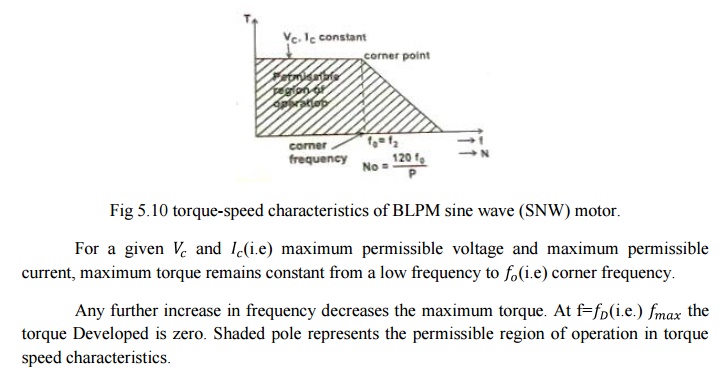
torque-speed characteristics of BLPM sine wave motor is shown in fig. 5.10
Effect of over speed
In the
torque speed characteristics, if the speed is increased beyond the point D,
there is a risk of over current because the back emf Eb continues to increase while the terminal
voltage remains constant. The current is
then almost a pure reactive current flowing from the motor back to the supply.
There is a small q axis current and a small torque because of losses in the
motor and in the converter. The power flow is thus reversed. This mode of operation
is possible only if the motor ‗over runs‘ the converter or is driven by an
external load or prime mover.
In such a
case the reactive current is limited only by the synchronous reactance. As the
speed increase further, it approaches the short circuit current Pq/Xs which is many times larger than the normal
current rating of the motor winding or the converter. This current may be
sufficient to demagnetize the magnets particularly if their temperature is
high. Current is rectified by the freewheeling diodes in the converter and
there is a additional risk due to over voltage on the dc side of the converter,
especially if a filter capacitor and ac line rectifiers are used to supply the
dc. But this condition is unusual, even though in the system design the
possibility should be assessed.
Solution
An
effective solution is to use an over speed relay to short circuit the 3υ
winding in a 3υ resistor or a short circuit to produce a braking torque without
actually releasing the converter.
Related Topics