Chapter: Physics : Acoustics and Ultrasonics
Industrial Applications of Ultrasonic waves
INDUSTRIAL
PPLICATIONS
Application
o ultrasonic waves
Ultrasonic waves find application in two
major fields:
a)
Engineering filed
b)
Medical field
Application of ultrasonic waves in
engineering and industry
Ultrasonic waves ind wide applications
in engineering and industry as follows.
1.
Non destructive testing(detection of
flaws in metals)
2.
Ultrasonic drilling
3.
Ultrasonic welding
4.
Ultrasonic drilling
5.
Ultrasonic soldering
6.
Ultrasonic cutting and machinery
7.
Ultrasonic cleaning
8.
Sonar
Ultrasonic Non destructive Testing
Principle: The basic principle behind the ultrasonic inspection is the transmission of the Ultrasound with the medium and the reflection or scattering at any surface or internal discontinuity in the medium due to the change in the acoustic impedance. The Discontinuity means the existence of the flaw or detect or cracks or hole in the material. The reflected or scattered sound waves are received and amplified and hence, the defects in the specimen are suitably characterized.
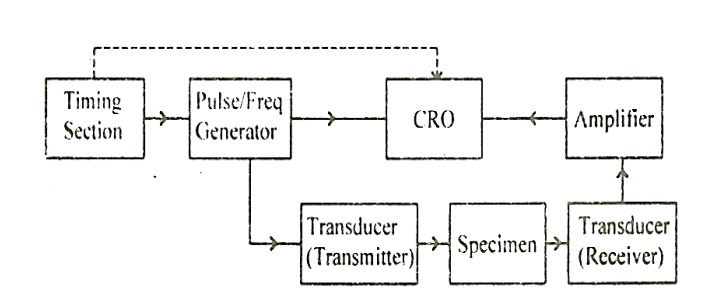
Block diagram of the Ultrasonic Flaw detector
Principle:
Whenever there is a change in the medium, then the Ultrasonic waves will be reflected. This is the principle used in Ultrasonic flaw detector. Thus, from the intensity of the reflected echoes, the flaws are detected without destroying the material and hence this method is known as a Non Destructive method.
Working:
a. The pulse generator generates high frequency waves and is applied to the Piezo-electric transducer and the same is recorded in the CRO.
b. The piezo electric crystals are resonated to produce Ultrasonic waves.
c. These Ultrasonic waves are transmitted through the given specimen.
d. These waves travel through the specimen and is reflected back by the other end.
e. The reflected Ultrasonic are received by the transducer and is converted into electric signals. These reflected signals are amplified and is recorded in the CRO.
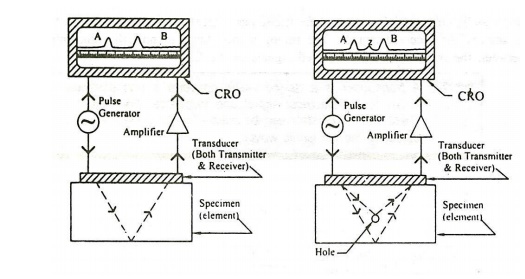
f. If the reflected pulse is same as that o the transmitted pulse, then it indictes that there is no defect in the specimen.
g. On the other hand, if there is any defect on the specimen like a small hole or pores, then the Ultrasonic will be relected bby the holes(i.e.) defects due to change in the medium.
h. From the time delay between the transmitted and received pulses, the position of the hole can be found.
i. From the height o the pulse received the depth of the hole can also be determined.
ULTRASONIC SCANNING MMETHODS - A,B AND C SCAN DISPLAYS
In the Ultrasonic scanning methods, the principle, construction and working is the same as that of the Ultrasonic law detector. Here, it is based on the position o the transducer and the output displayed in the CRO screen, we can classiy the scanning methods into three types
a. A-scan
b. B-scan
c. T-M scan or C-scan
All these three modes of scanning are obtained with respect to the pulses of Ultrasound transmitted into and received from the specimen. The three modes are explained below.
a A-Scan or Amplitude mode display
Amplitude mode display gives only one-dimensional information about the given specimen. In this, a single transducer is used to transmit and receive the pulses from the specimen.
The received or the reflected echo signals from the specimen is given to the Y-Plate and time base is connected to the X-Plate of the CRO, so that they are displayed as vertical spikes along horizontal base line as shown in the figure 1.10.1.
The height of the vertical spikes corresponds to the strength of the echo from the specimen. The position of the vertical spike from left to right along the X-axis corresponds to the depth of penetration.i.e, it gives the total time taken by the Ultrasonic sound to travel from transmitter to the specimen and from the specimen to the receiver.
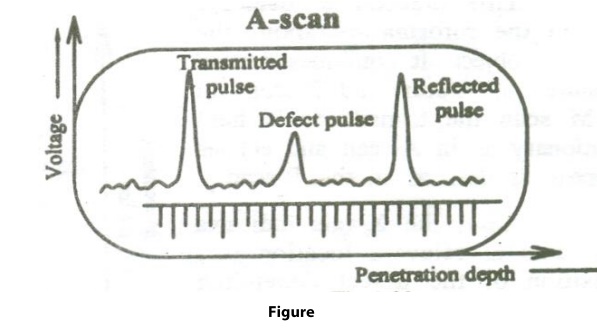
Thus by passing Ultrasonic waves o known velocity and by noting the time delay, we can find the distance at which the detect or flaws are present, by using the formula.
Distance = Velocity x time
In ultrasonic flaw detector, A-scan method is used to detect the position and size of the flaws.
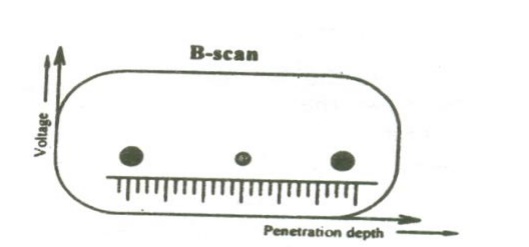
b. B-Scan or Brightness Mode Scan
B-scan or Brightness mode display gives a two dimensional image. The principle of the B-Scan is same as that of A-Scan except with a small difference. Here in the B-Scan the transducer can be moved rather than keeping in a fixed position. As a result each echo’s are displayed as dots on the screen as shown in the figure 1.10.2.
c. T.M Scan or Time –Motion Mode or C-Scan display
This method is used to obtain the information about the moving object.
This combines the features of both A-Scan as well as B-Scan. In this the transducer is held stationary as in A-scan and echoes appear as dots in the B-scan.
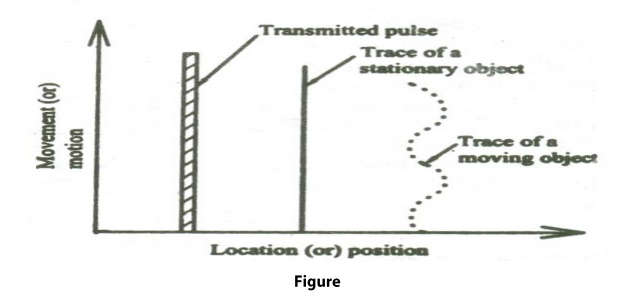
Here, the X-axis indicates the dots at the relevant location and Y-axis indicates the movement of the object. Therefore when the object moves, the dot also moves at a low speed. Thus an object with the oscillatory movement will appear as a trace as shown in the figure 1.10.3.
Sonogram Recording of movement of Heart
1 Fetal Heart Movement
Principle:
It works under the principle of Doppler Effect i.e., there is an apparent change in the frequency between the incident sound waves on the fetus and the reflected sound waves from the fetus.
Description:
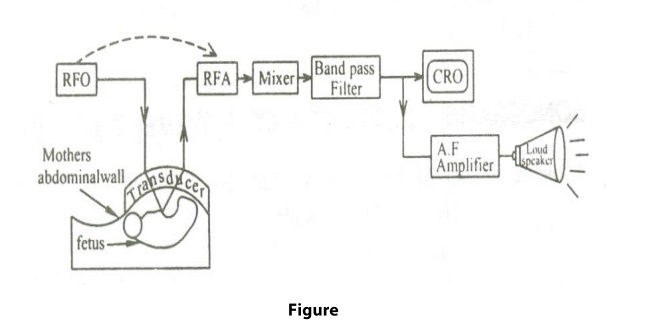
It consists of a Radio Frequency Oscillator(RFO), for producing 2 MHz of frequency and RFA (Radio Frequency Amplifier) to amplify the receiver signal as shown in the figure.
Working:
The transducer is fixed over the mother’s absominal wall, with the help of a gel or oil. RFO is switched on to drive the pulses and hence the transducer produces Ultrasonic waves of 2 MHz. These Ultrasonic waves are made to be incident on the fetus.
The reflected Ultrasonic waves from the etch are received by the transducer and are amplified by RFA. Both the incident and the received signals are mixed by the mixer and is filtered to distinguish the various types of sound and finally the Doppler shift or change in frequency is measured. The movement o the heart can be viewed visually by CRO or can be heard by the Loud Speaker, after necessary amplification by AF.
2 Ultrasonic Imaging System
Principle of working
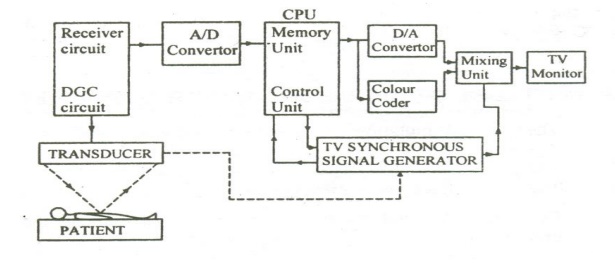
During the scanning of the body surface by Ultrasonic transducer, the Ultrasonic waves are transmitted into the patient’s body.
The echoes from the body are collected by the receiver circuit.
Since some echoes come from the depth, they are weak; therefore, proper depth gain compensation is given by DGC circuit.
Then these signals are converted into digital signals by an analog to digital converter and are stored in the memory of the Control Processing Unit (CPU) o a computer.
Meanwhile, the control unit in the CPU receives the signals of transducer position and TV synchronous pulses. These signals generates X plate and Y plate address information’s or the T.V monitor and is also stored in the memory of the CPU.
The stored signals are processed and colour coded and is given to the digital to analog(D/A converter), which converts the digital into analog signal.
Finally the mixing circuit mixes the analog signals and TV synchronous signals properly. The mixed signals are finally fed to the video section of the television monitor as shown in the igure 1.12.
The TV monitor produces the coloured Ultrasonic image of the internal part o the Body.
Related Topics