Chapter: Mechanical : Computer Aided Design : Geometric Modeling
Geometric Modeling
Geometric
Modeling
Introduction
Geometric modeling is a part of
computational geometry and applied mathematics that studies algorithms and
techniques for the mathematical description of shapes.
The shapes defined in geometric modeling
are generally 2D or 3D, even though several of its principles and tools can be
used to sets of any finite dimension. Geometric modeling is created with
computer based applications. 2D models are significant in computer technical
drawing and typography. 3D models are fundamental to CAD and CAM and
extensively used in many applied technical branches such as civil engineering
and mechanical engineering and medical image processing.
Geometric models are commonly differentiated
from object oriented models and procedural, which describe the shape perfectly
by an opaque algorithm that creates its appearance. They are also compared with
volumetric models and digital images which shows the shape as a subset of a
regular partition of space; and with fractal models that provide an infinitely
recursive description of the shape. Though, these differences are often fuzzy:
for example, a image can be interpreted as a collection of colored squares; and
geometric shape of circles are defined by implicit mathematical equations.
Also, a fractal model gives a parametric model when its recursive description
is truncated to a finite depth.
Representation
of curves
A
curve is an entity
related to a line but
which is not
required to be straight.
A curve is
a
topological space which is internally homeomorphism to a line; this shows that
a curve is a set of points which close to each of its points looks like a line,
up to a deformation.
A
conic section is a curve created as
the intersection of a
cone with a plane. In analytic geometry, a
conic may be
described as a plane
algebraic curve of degree
two, and as a quadric of dimension two.
There
are several of added geometric definitions possible. One of the most practical,
in that it involves only the plane, is that a non circular conic has those
points whose distances to various point, called a ‘focus’,and several line,
called a ‘directrix’,are in a fixed ratio, called the ‘eccentricity’.
1.Conic Section
Conventionally,
the three kinds of conic section are the hyperbola, the ellipse and the
parabola. The circle is a unique case of the ellipse, and is of adequate
interest in its own right that it is sometimes described the fourth kind of
conic section. The method of a conic relates to its ‘eccentricity’,those with
eccentricity less than one is ellipses, those with eccentricity equal to one is
parabolas, and those with eccentricity greater than one is hyperbolas. In the
focus, directrix describes a conic the circle is a limiting with eccentricity
zero. In modern geometry some degenerate methods, such as the combination of
two lines, are integrated as conics as well.
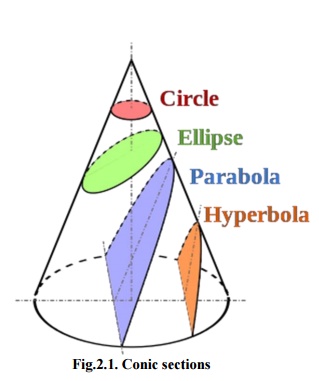
Fig.2.1.
Conic sections
The three kinds of
conic sections are the ellipse, parabola, and hyperbola. The circle can be
taken as a fourth kind of ellipse. The circle and the ellipse occur when the
intersection of plane and cone is a closed curve. The circle is generated when
the cutting plane is parallel to the generating of the cone. If the cutting
plane is parallel to accurately one generating line of the cone, then the conic
is unbounded and is mentioned a parabola. In the other case, the figure is a
hyperbola.
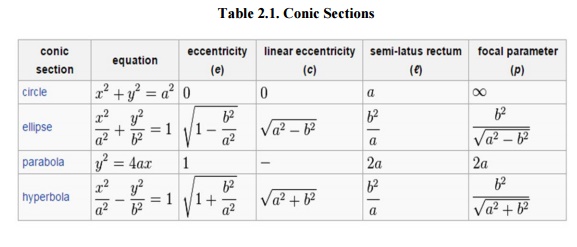
Different
factors are connected with a conic section, as shown in the Table 2.1. For the
ellipse, the table shows the case of ‘a’> ‘b’, for which the major axis is
horizontal; for the other case, interchange the symbols ‘a’and ‘b’.For the
hyperbola the east-west opening case is specified. In all cases, ‘a’nd ‘b’are
positive.
Table
2.1. Conic Sections
The non-circular conic sections are accurately those
curves that, for a point ‘F’,a line ‘L’not having ‘F’and
a number ‘e’ which is
non-negative, are the locus of
points whose distance to ‘F’equals ‘e’ multiplies their
distance to ‘L’.‘F’is called
the focus, ‘L’the directrix, and
‘e’the eccentricity.
i. Linear
eccentricity (c) is the space between the center and the focus.
ii.Latus
rectum (2l) is parallel to the directrix and passing via the focus.
iii. Semi-latus
rectum (l) is half the latus rectum.
iv.
Focal parameter (p) is the distance from
the focus to the directrix. The relationship for the above : p*e = l and a*e=c.
Hermite
curve
A Hermite curve is a spline where every
piece is a third degree polynomial defined in Hermite form: that is, by its
values and initial derivatives at the end points of the equivalent domain
interval. Cubic Hermite splines are normally used for interpolation of numeric
values defined at certain dispute values x1,x2,x3, …..xn,to achieve a smooth
continuous function. The data should have the preferred function value and
derivative at each Xk. The Hermite formula is used to every interval
(Xk,
Xk+1)
individually. The resulting spline become continuous and will have first
derivative.
Cubic polynomial splines are specially
used in computer geometric modeling to attain curves that pass via defined
points of the plane in 3D space. In these purposes, each coordinate of the
plane is individually interpolated by a cubic spline function of a divided
parameter‘t’.
Cubic
splines can be completed to functions of different parameters, in several ways.
Bicubic splines are frequently used to interpolate data on a common rectangular
grid, such as pixel values in a digital picture. Bicubic surface patches,
described by three bicubic splines, are an necessary tool in computer graphics.
Hermite curves are simple to calculate but also more powerful. They are used to
well interpolate between key points.
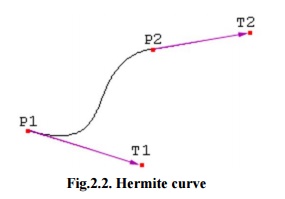
Fig.2.2.
Hermite curve
The following vectors needs to compute a Hermite
curve:
·
P1: the start point of the Hermite curve
·
T1: the tangent to the start point
·
P2: the endpoint of the Hermite curve
·
T2: the tangent to the endpoint
These four vectors are
basically multiplied with four Hermite basis functions h1(s), h2(s), h3(s)
and,h4(s) and added together.
h1(s) = 2s3 - 3s2 + 1 h2(s) =
-2s3 + 3s2
h3(s) = s3 - 2s2 + s h4(s) = s3
- s2
Figure 2.3 shows the functions of Hermite Curve of
the 4 functions (from left to right: h1, h2, h3, h4).
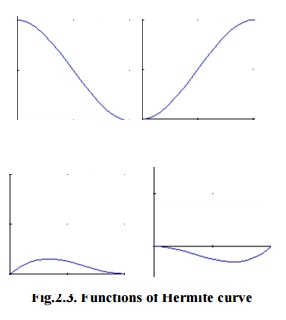
Fig.2.3.
Functions of Hermite curve
A
closer view at functions ‘h1’and ‘h2’,the result shows that function ‘h1’starts
at one and goes slowly to zero and function ‘h2’starts at zero and goes slowly
to one.
At the moment, multiply
the start point with function ‘h1’and the endpoint with function ‘h2’. Let s
varies from zero to one to interpolate between start and endpoint of Hermite
Curve. Function
‘h3’and function
‘h4’are used to the tangents in the similar way. They make confident that the
Hermite curve bends in the desired direction at the start and endpoint.
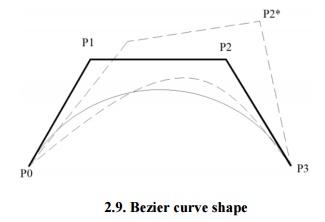
Bezier curve
Bezier curves are
extensively applied in CAD to model smooth curves. As the curve is totally
limited in the convex hull of its control points P0, P1,P2 & P3, the points
can be graphically represented and applied to manipulate the curve logically.
The control points P0 and P3 of the polygon lie on the curve (Fig.2.4.). The
other two vertices described the order, derivatives and curve shape. The Bezier
curve is commonly tangent to first and last vertices.
Cubic
Bezier curves and Quadratic Bezier curves are very common. Higher degree Bezier
curves are highly computational to evaluate. When more complex shapes are
required, Bezier curves in low order are patched together to produce a
composite Bezier curve. A composite Bezier curve is usually described to as a
‘path’in vector graphics standards and programs. For smoothness assurance, the
control point at which two curves meet should be on the line between the two
control points on both sides.
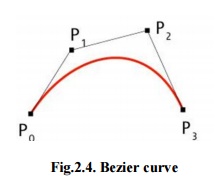
Fig.2.4.
Bezier curve
A general adaptive
method is recursive subdivision, in which a curve's control points are verified
to view if the curve approximates a line segment to within a low tolerance. If
not, the curve is further divided parametrically into two segments, 0 ≤t ≤0.5
and 0.5 ≤ ≤t1, and the same process is used recursively to each half. There are
future promote differencing techniques, but more care must be taken to analyze
error transmission.
Analytical methods
where a Bezier is intersected with every scan line engage finding roots of
cubic polynomials and having with multiple roots, so they are not often applied
in practice. A Bezier curve is described by a set of control points P0
through Pn, where ‘n’is order of curve. The initial and end control
points are commonly the end points of the curve; but, the intermediate control
points normally do not lie on the curve.
(i)
Linear Bezier curves
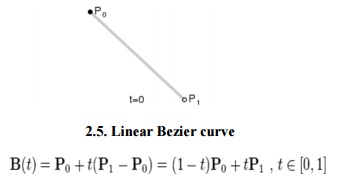
2.5.
Linear Bezier curve
As shown in the figure
2.5, the given points P0 and P1, a linear Bezier curve is
merely a straight line between those two points. The Bezier curve is
represented by And it is similar to linear interpolation.
(ii)
Quadratic Bezier curves
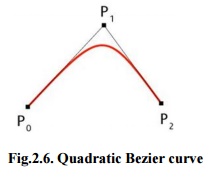
Fig.2.6.
Quadratic Bezier curve
As
shown in the figure 2.6, a quadratic Bezier curve is the path defined by the
function B(t), given points P0, P1, and P2,

This
can be interpreted as the linear interpolate of respective points on the linear
Bezier curves from P0 to P1 and from P1 to P2
respectively. Reshuffle the preceding equation gives:

The
derivative of the Bezier curve with respect to the value ‘t’is
From
which it can
be finished that
the tangents to the curve
at P0 and P2 intersect
at P1. While
‘t’increases from zero
to one, the curve departs from P0 in the direction of P1,
then turns to land at P2 from the direction of P1.
The
following equation is a second derivative of the Bezier curve with respect to
‘t’:
A quadratic Bezier
curve is represent a parabolic
segment. Since a parabola curve is a conic section, a few sources refer to
quadratic Beziers as ‘conic arcs’.
(iii) Cubic Bezier curves
As
shown in figure 2.7, four control points P0, P1, P2
and P3 in the higher-dimensional space describe as a Cubic Bezier
curve. The curve begins at P0 going on the way to P1 and
reaches at P3 coming from the direction of P2. Typically,
it will not pass through control points P1 / P2, these
points are only there to give directional data. The distance between P0
and P1 determines ‘how fast’and ‘how far’the curve travels towards P1
before turning towards P2.
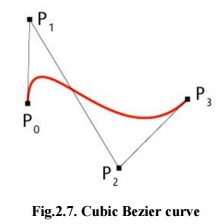
Fig.2.7.
Cubic Bezier curve
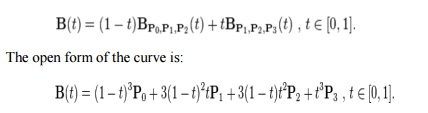
The
function B Pi, Pj,
Pk (t) for the quadratic Bezier curve written by
points Pi, Pj, and Pk,
the cubic Bezier curve can be described as a linear blending of two quadratic
Bezier curves:
For several choices of P1 and P2 the Bezier curve may meet itself.
Any sequence of any
four dissimilar points can be changed to a cubic Bezier curve that goes via all
four points in order. Given the beginning and ending point of a few cubic
Bezier curve, and the points
beside the curve equivalent to t = 1/3 and t = 2/3, the control points for the
original Bezier curve can be improved.
The
following equation represent first derivative of the cubic Bezier curve with
respect to t:

The
following equation represent second derivative of the Bezier curve with respect
to t:
1. Properties Bezier curve
· The
Bezier curve starts at P0 and
ends at Pn; this is known as ‘endpoint
interpolation’property.
· The
Bezier curve is a straight line when all the control points of a cure are
collinear.
· The
beginning of the Bezier curve is tangent to the first portion of the Bezier
polygon.
· A
Bezier curve can be divided at any point into two sub curves, each of which is
also a Bezier curve.
· A
few curves that look like simple, such as the circle, cannot be expressed
accurately by a Bezier; via four piece cubic Bezier curve can similar a circle,
with a maximum radial error of less than one part in a thousand (Fig.2.8).
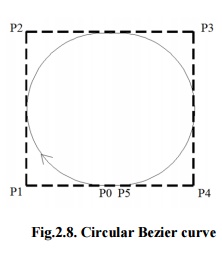
Fig.2.8.
Circular Bezier curve
· Each
quadratic Bezier curve is become a cubic Bezier curve, and more commonly, each
degree ‘n’Bezier curve is also a degree ‘m’curve for any m > n.
Bezier
curves have the different diminishing property. A Bezier curves does not
‘ripple’more than the polygon of its control points, and may actually
‘ripple’lss than that.
· Bezier
curve is similar with respect to t and (1-t). This represents that the sequence
of control points defining the curve can be changes without modify of the curve
shape.
· Bezier
curve shape can be edited by either modifying one or more vertices of its
polygon or by keeping the polygon unchanged or simplifying multiple coincident
points at a vertex (Fig .2.19).
2. Construction of Bezier curves
(i)
Linear curves:
Fig.2.10.
Construction of linear Bezier curve
The figure 2.10 shows
the function for a linear Bezier curve can be via of as describing how far B(t)
is from P0 to P1 with respect to ‘t’. When t equals to
0.25, B(t) is one quarter of the way from point P0 to P1.
As ‘t’varies from 0 to 1, B(t) shows a straight line from P0
to P1.
(ii)
Quadratic curves
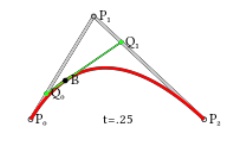
Fig.2.11.
Construction of linear Quadratic curve
As shown
in figure 2.11,
a quadratic Bezier
curves one can
develop by intermediate
points Q0 and Q1 such that as ‘t’varies from 0 to 1:
· Point
Q0 (t) modifying from P0
to P1 and expresses a
linear Bezier curve.
· Point
Q1 (t) modifying from P1
to P2 and expresses a
linear Bezier curve.
· Point
B (t) is interpolated linearly between Q0(t) to Q1(t) and
expresses a quadratic Bezier curve.
(iii)
Higher-order curves
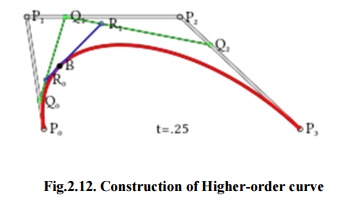
Fig.2.12.
Construction of Higher-order curve
As shown in figure 2.12,
a higher-order curves one requires correspondingly higher intermediate points.
For create cubic curves, intermediate points Q0, Q1, and
Q2 that express as linear
Bezier curves, and points R0 and R1 that express as quadratic Bezier curves.
3. Rational Bezier curve
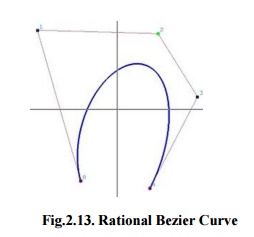
Fig.2.13.
Rational Bezier Curve
The
rational Bezier curve includes variable weights (w) to provide closer
approximations to arbitrary shapes. For Rational Bezier Curve, the numerator is
a weighted Bernstein form Bezier and the denominator is a weighted sum of
Bernstein polynomials. Rational Bezier curves can be used to signify segments
of conic sections accurately, including circular arcs (Fig.2.13).
Related Topics