Chapter: Mechanical : Computer Aided Design : Geometric Modeling
Important Questions and Answers: Geometric Modeling
GEOMETRIC MODELING
1. What are
the two types of equations for curve representation?
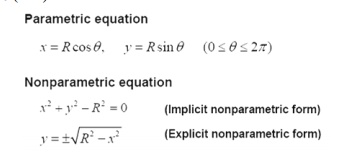
(1) Parametric
equation x, y, z coordinates are related by a parametric variable (u or θ)
(2) Nonparametric
equation x, y, z coordinates are related by a function
Example:
Circle (2-D)
Name some types of curves used in geometric modelling.
Hermite curves
Bezeir curves
B-spline curv es
NURBS curv es
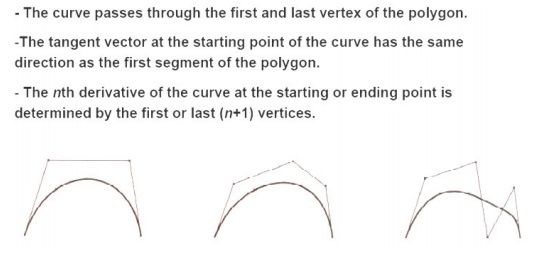
3 What are
the desirable properties of Bezier Curve?
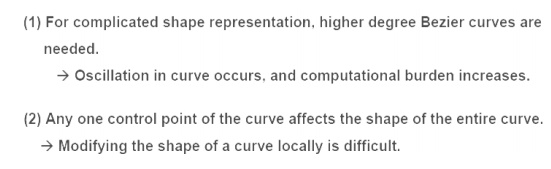
4 Write any
Two Drawbacks of Bezier Curves.
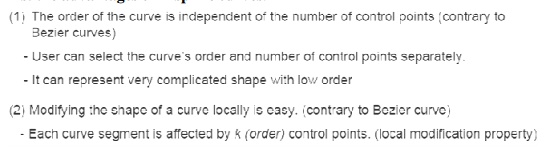
5. List the
advantages of B -spline curves.
6. What are the functions of Geometric Modelling
in design analysis?
Evaluation of are a, volume, mass and inertia properties
Interference chec king in assemblies
Analysis of tolerance build-up in assemblies Kinematic analys
is of mechanisms and robots Automatic mesh generation for finite element
analysis
7. What are the functions of Geometric Modelling
in Manufacturing??
Parts classification Process planning
NC data generatio n and verification Robot program ge neration
Scheduling
8. List the
Properties of a Geometric Modeling System.
The geometric model must stay invariant with regard to its
location and o rientation The solid must have an in terior and must not have
isolated parts
The solid must be finite a nd occupy only a finite shape
The application of a trans formation or Boolean operation must
produce another solid The solid must have a finite number of surfaces which can
be described
The boundary of the solid must not be ambiguous
9. What are called 2 ½ - D Wire frame models?
Two classes of shape for which a simple wire-frame
representation is often adequate are those shapes defined by projecting a plane
profile along its normal or by rotating a planar profile about an axis. Such
shapes are not two-dimensional, but neither do they require sophisticated
three-dimensional schemes for their representation. Such representation is
called 2 ½ - D.
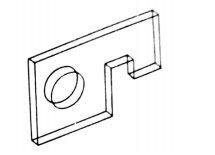
10. Draw
an example for 2 ½ - D Wire frame model.
11.
Catalog Techniques In Surface Modelling.
i.
Surface Patch
ii.
Coons Patch
iii.
Bicubic Patch
iv.
Be’zier Surface
v.
B-Spline Surfaces
12.
What are the Solid Modeling Techniques?
The various methods for representing the solids are:
1. Half-space
method
2. Boundary
representation method (B-rep)
3. Constructive
solid geometry (CSG and C-rep)
4. Sweep
representation
5. Analytical
solid modeling (ASM)
6. Primitive
instancing
7. Spatial
partitioning representation
a. Cell
decomposition
b. Spatial
occupancy enumeration
c. Octree
encoding
13.
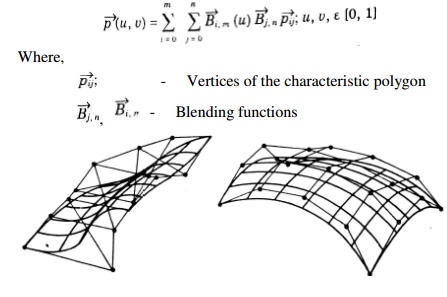
Write short note on Be’zier Surface.
The
Be’zier s urface formulation use a characteristic polygon
![]() Points the Be zier surface
are given by
Points the Be zier surface
are given by
14.
Write any topological te rms used Boundary
representation method (B-rep).
Vertex
(V) : It is a unique point (an ordered triplet) in space
Edge
(E): It is finite, non-self intersecting, directed space c urve bounded by t wo
vertices that are not necessarily distinct
Face
(F) : It is defined as a finite connected, non-self-intersecting, region of a
closed oriented surface bounded by one or mor e loops
Loop
(L) : It is an ordered alternating sequence of vertices and edges
Genus
(G) : It is the topological name for the number of handles or through holes in
an object
Body/Shell(B)
: It is a set of faces that bound a single connected c losed volume. A m inimum
body is a point
15. What
is called singular body in b-rep?
A minimum body is a point;
topologically this body has one face, one vertex, and no edges. It is called a
seminal or singular body
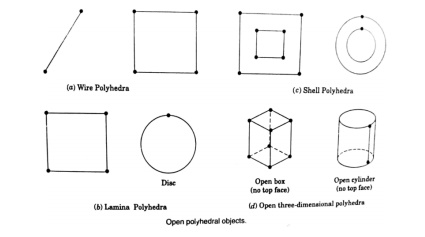
16.
Sketch some open polyhedral objects used in
B-rep.
17. Write Euler’s formula for open and closed
objects used in b-rep.
Euler –
Poincare Law for closed objects :
F – E + V
– L = 2 (B – G)
Euler –
Poincare Law for open objects :
F – E + V
– L = B – G
18.
What are Advantages and Disadvantages of
b-rep?
Advantages
O Appropriate
to construct solid models of unusual shapes
O Relatively
simple to convert a b-rep model to wireframe model
Disadvantages
of b-rep
O Requires more storage
O Not suitable for applications
like tool path generation
O
Slow manipulation
19.
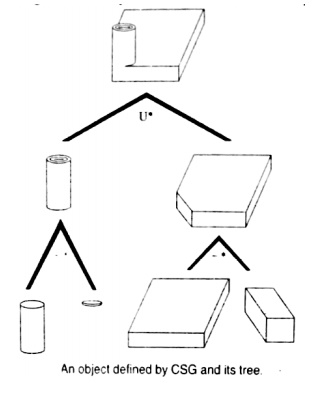
How solids are created using CSG?
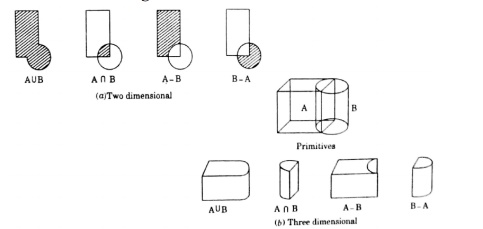
20. Give an example for CS G Tree.
Related Topics