Chapter: Object Oriented Programming and Data Structure : Non-Linear Data Structures
Breadth First Search
Explain in detail about Breadth
First Search
This
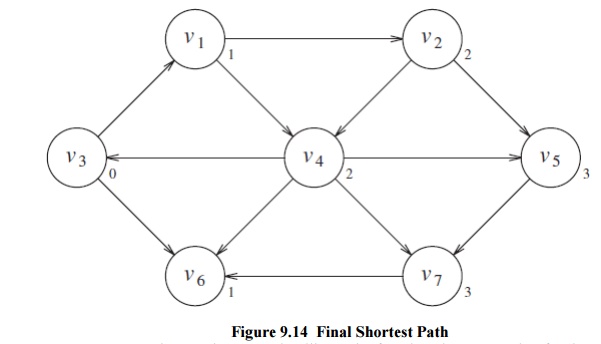
strategy for searching a graph is known as breadth-first
search. It operates by processing vertices in layers: The vertices closest
to the start are evaluated first, and the most distant vertices are evaluated
last. This is much the same as a level-order traversal for trees.
Given
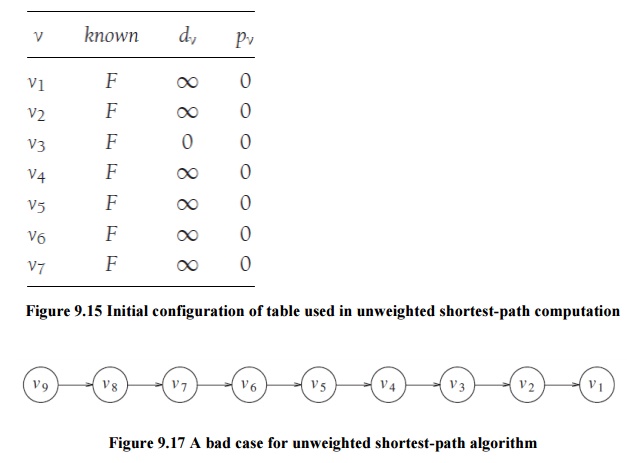
this strategy, we must translate it into code. Figure 9.15 shows the initial
configuration of the table that our algorithm will use to keep track of its
progress. For each vertex, we will keep track of three pieces of information.
First, we will keep its distance from s
in the entry dv. Initially all
vertices are unreachable except for s,
whose path length is 0. The entry in pv
is the bookkeeping variable, which will allow us to print the actual paths. The
entry known is set to true after a
vertex is processed. Initially, all entries are not known, including the start
vertex. When a vertex is marked known,
we have
a guarantee that no cheaper path will ever be found, and so processing for that vertex is essentially complete. The basic algorithm can be described in Figure 9.16. The algorithm n below mimics the diagrams by declaring as known the vertices at distance d = 0, then d = 1, then d = 2, and so on, and setting all the adjacent vertices w that still have dw = ∞to a distance dw = d + 1.
Pseudocode for unweighted shortest-path algorithm
void
Graph::unweighted( Vertex s )
{
for each
Vertex v
{
v.dist =
INFINITY;
v.known =
false;
}
s.dist =
0;
for( int
currDist = 0; currDist < NUM_VERTICES; currDist++ )
for each
Vertex v
if(
!v.known && v.dist == currDist )
{
v.known =
true;
for each
Vertex w adjacent to v
if(
w.dist == INFINITY )
{
w.dist =
currDist + 1;
w.path =
v;
}
}
}
using the
above algorithmBy tracing back through the pv
variable, the actual path can be printed. We will seehow when we discuss the
weighted case. The running time of the algorithm is O(|V|2), because of the
doubly nested for loops. An obvious inefficiency is that the outside loop
continues until NUM_VERTICES-1, even if all the vertices become known much earlier. Although an extra
test could be made to avoid this, it does not affect the worst-case running
time, as can be seen by generalizing what happens when the input is the graph
in Figure 9.17 with start vertex v9.
We can remove the inefficiency in much the same way as was done for topological
sort. At any point in time, there are only two types of unknown vertices that have dv
_=∞. Some have dv = currDist, and the
rest have dv = currDist + 1. Because
of this extra structure, it is very wasteful to search through the entire table
to find a proper vertex. A very simple but abstract solution is to keep two
boxes. Box #1 will have the unknown vertices with dv = currDist, and box #2 will have dv = currDist + 1.
The test
to find an appropriate vertex v can
be replaced by finding any vertex in box #1. After updating w (inside the innermost if block), we
can add w to box #2. After the outermost
for loop erminates, box #1 is empty, and box #2 can be transferred to box #1
for the next pass of the for loop. We can refine this idea even further by
using just one queue. At the start of the pass, the queue contains only
vertices of distance currDist. When we add adjacent vertices of distance
currDist + 1, since they enqueue at the rear, we are guaranteed that they will
not be processed until after all the vertices of distance currDist have been
processed. After the last vertex at distance currDist dequeues and is
processed, the queue only contains vertices of distance currDist + 1, so this
process perpetuates. We merely need to begin the process by placing the start
node on the queue by itself.
The
refined algorithm is shown in Figure 9.18. In the pseudocode, we have assumed
that the start vertex, s, is passed
as a parameter. Also, it is possible that the queue might empty prematurely, if
some vertices are unreachable from the start node. In this case, a distance of
INFINITY will be reported for these nodes, which is perfectly reasonable.
Finally, the known data member is not used; once a vertex is processed it can
never enter the queue again, so the fact that it need not be reprocessed is
implicitly marked. Thus, the known data member can be discarded. Figure 9.19
shows how the values on the graph we have been using are changed during the
algorithm (it includes the changes that would occur to known if we had kept
it). Using the same analysis as was performed for topological sort, we see that
the running time is O(|E| + |V|), as long as adjacency lists are used.
Related Topics