Chapter: Mechanical : Kinematics of Machinery : Basics of Mechanisms
Basics of Mechanisms
BASICS OF MECHANISMS
Introduction:
Definitions : Link or Element, Pairing of Elements with degrees of freedom, Grubler’s criterion (without derivation), Kinematic chain, Mechanism, Mobility of Mechanism, Inversions, Machine.
Kinematic Chains and Inversions:
Kinematic chain with three lower pairs, Four bar chain, Single slider crank chain and Double slider crank chain and their inversions.
Mechanisms:
i) Quick return motion mechanisms – Drag link mechanism, Whitworth mechanism and Crank and slotted lever mechanism
ii) Straight line motion mechanisms – Peacelier’s mechanism and Robert’s mechanism.
iii) Intermittent motion mechanisms – Geneva mechanism and Ratchet & Pawl mechanism.
iv)Toggle mechanism, Pantograph, Hooke’s joint and Ackerman Steering gear mechanism.
Terminology and Definitions-Degree of Freedom, Mobility
· Kinematics: The study of motion (position, velocity, acceleration). A major goal of understanding kinematics is to develop the ability to design a system that will satisfy specified motion requirements. This will be the emphasis of this class.
· Kinetics: The effect of forces on moving bodies. Good kinematic design should produce good kinetics.
· Mechanism: A system design to transmit motion. (low forces)
· Machine: A system designed to transmit motion and energy. (forces involved
· Basic Mechanisms: Includes geared systems, cam-follower systems and linkages (rigid links connected by sliding or rotating joints). A mechanism has multiple moving parts (for example, a simple hinged door does not qualify as a mechanism).
· Examples of mechanisms: Tin snips, vise grips, car suspension, backhoe, piston engine, folding chair, windshield wiper drive system, etc.
Key concepts:
· Degrees of freedom: The number of inputs required to completely control a system. Examples: A simple rotating link. A two link system. A four-bar linkage. A five-bar linkage.
· Types of motion: Mechanisms may produce motions that are pure rotation, pure translation, or a combination of the two. We reduce the degrees of freedom of a mechanism by restraining the ability of the mechanism to move in translation (x-y directions for a 2D mechanism) or in rotation (about the z-axis for a 2-D mechanism).
· Link: A rigid body with two or more nodes (joints) that are used to connect to other rigid bodies. (WM examples: binary link, ternary link (3 joints), quaternary link (4 joints)
· Joint: A connection between two links that allows motion between the links. The motion allowed may be rotational (revolute joint), translational (sliding or prismatic joint), or a combination of the two (roll-slide joint).
· Kinematic chain: An assembly of links and joints used to coordinate an output motion with an input motion.
· Link or element:
A mechanism is made of a number of resistant bodies outof which some may have motions relative to the others. Aresistant body or a group of resistant bodies with rigid connections preventing their relative movement is known as alink.
A link may also be defined as a member or a combination ofmembers of a mechanism, connecting other members and havingmotion relative to them, thus a link may consist of one or moreresistant bodies. A link is also known as Kinematic link or anelement.
Links can be classified into 1) Binary, 2) Ternary, 3) Quarternary, etc.
· Kinematic Pair:
A Kinematic Pair or simply a pair is a joint of two links having relative motion between them.
Example:
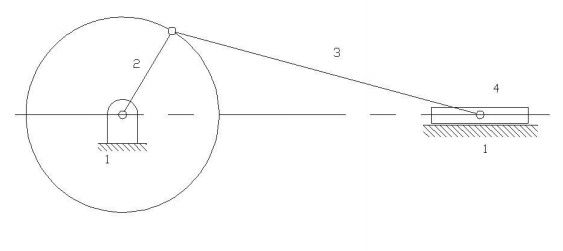
In the above given Slider crank mechanism, link 2 rotates relative to link 1 and constitutes a revolute or turning pair. Similarly, links 2, 3 and 3, 4 constitute turning pairs. Link 4 (Slider) reciprocates relative to link 1 and its a sliding pair.
Types of Kinematic Pairs:
Kinematic pairs can be classified according to
i) Nature of contact.
ii) Nature of mechanical constraint.
iii) Nature of relative motion.
i) Kinematic pairs according to nature of contact:
a) Lower Pair: A pair of links having surface or area contact between the members is known as a lower pair. The contact surfaces of the two links are similar.
Examples: Nut turning on a screw, shaft rotating in a bearing, all pairs of a slider-crank mechanism, universal joint.
b) Higher Pair: When a pair has a point or line contact between the links, it is known as a higher pair. The contact surfaces of the two links are dissimilar.
Examples: Wheel rolling on a surface cam and follower pair, tooth gears, ball and roller bearings, etc.
ii) Kinematic pairs according to nature of mechanical constraint.
a) Closed pair: When the elements of a pair are held together mechanically, it is known as a closed pair. The contact between the two can only be broken only by the destruction of at least one of the members. All the lower pairs and some of the higher pairs are closed pairs.
b) Unclosed pair: When two links of a pair are in contact either due to force of gravity or some spring action, they constitute an unclosed pair. In this the links are not held together mechanically. Ex.: Cam and follower pair.
iii) Kinematic pairs according to nature of relative motion.
a) Sliding pair: If two links have a sliding motion relative to each other, they form a sliding pair. A rectangular rod in a rectangular hole in a prism is an example of a sliding pair.
b) Turning Pair: When on link has a turning or revolving motion relative to the other, they constitute a turning pair or revolving pair.
c) Rolling pair: When the links of a pair have a rolling motion relative to each other, they form a rolling pair. A rolling wheel on a flat surface, ball ad roller bearings, etc. are some of the examples for a Rolling pair.
d) Screw pair (Helical Pair): if two mating links have a turning as well as sliding motion between them, they form a screw pair. This is achieved by cutting matching threads on the two links.
The lead screw and the nut of a lathe is a screw Pair
e) Spherical pair: When one link in the form of a sphere turns inside a fixed link, it is a spherical pair. The ball and socket joint is a spherical pair.
Related Topics