Chapter: Mechanical : Kinematics of Machinery : Basics of Mechanisms
Description of common mechanisms-Single, Double and offset slider mechanisms - Quick return mechanisms
Description of common mechanisms-Single, Double
and offset slider mechanisms - Quick return mechanisms
1.Quick Return Motion Mechanisms:
Many a
times mechanisms are designed to perform repetitive operations. During these
operations for a certain period the mechanisms will be under load known as
working stroke and the remaining period is known as the return stroke, the
mechanism returns to repeat the operation without load. The ratio of time of
working stroke to that of the return stroke is known a time ratio. Quick return
mechanisms are used in machine tools to give a slow cutting stroke and a quick
return stroke. The various quick return mechanisms commonly used are i)
Whitworth ii) Drag link. iii) Crank and slotted lever mechanism
2. Whitworth quick return mechanism:
Whitworth
quick return mechanism is an application of third inversion of the single
slider crank chain. This mechanism is shown in the figure below. The crank OC
is fixed and OQ rotates about O. The slider slides in the slotted link and
generates a circle of radius CP. Link 5 connects the extension OQ provided on
the opposite side of the link 1 to the ram (link 6). The rotary motion of P is
taken to the ram R which reciprocates. The quick return motion mechanism is
used in shapers and slotting machines.
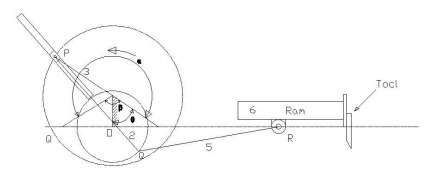
The angle
covered during cutting stroke from P1 to P2 in counter clockwise direction is α
or 360 -2θ. During the return stroke, the angle covered is 2θ or β.
3. Drag link mechanism :
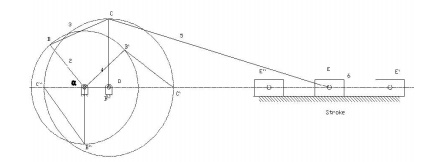
This is
four bar mechanism with double crank in which the shortest link is fixed. If
the crank AB rotates at a uniform speed, the crank CD rotate at a non -uniform
speed. This rotation of link CD is transformed to quick return reciprocatory
motion of the ram E by the link CE as shown in figure.
When the
crank AB rotates through an angle α in Counter clockwise direction during
working stroke, the link CD rotates through 180. We can observe that / α
>/ β. Hence time of working stroke is α /β times more or the return
stroke is α /β times quicker. Shortest link is always stationary link. Sum of
the shortest and the longest links of the four links 1, 2, 3 and 4 are less
than the sum of the other two. It is the necessary condition for the drag link
quick return mechanism.
4.Crank and slotted lever mechanism:
It is an
application of second inversion. The crank and slotted lever mechanism is shown
in figure below.
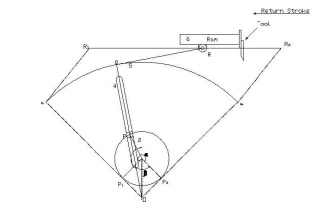
In this
mechanism link 3 is fixed. The slider (link 1) reciprocates in oscillating
slotted lever (link 4) and crank (link 2) rotates. Link 5 connects link 4 to
the ram (link 6). The ram with the cutting tool reciprocates perpendicular to
the fixed link 3. The ram with the tool reverses its direction of motion when
link 2 is perpendicular to link 4. Thus the cutting stroke is executed during
the rotation of the crank through angle α and the return stroke is executed
when the crank rotates through angle β or 360 – α. Therefore, when the crank
rotates uniformly, we get,

This
mechanism is used in shaping machines, slotting machines and in rotary engines.
5.Ratchets
and escapements - Indexing Mechanisms - Rocking Mechanisms: Intermittent motion
mechanism:
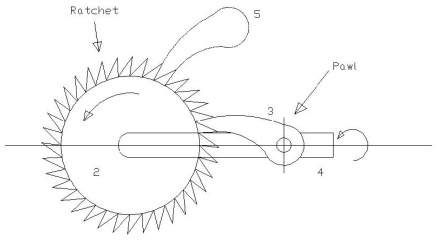
Ratchet and Pawl mechanism: This
mechanism is used in producing intermittent rotary motion member. A ratchet and Pawl mechanism consists of a ratchet wheel 2
and a pawl 3 as shown in the figure. When the lever 4 carrying pawl is raised,
the ratchet wheel rotates in the counter clock wise direction (driven by pawl).
As the pawl lever is lowered the pawl slides over the ratchet teeth. One more
pawl 5 is used to prevent the ratchet from reversing. Ratchets are used in feed
mechanisms, lifting jacks, clocks, watches and counting devices.
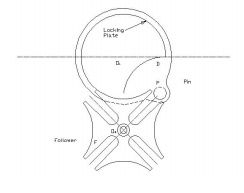
6. Geneva mechanism: Geneva
mechanism is an intermittent motion mechanism. It consists of a driving wheel D carrying a pin P which
engages in a slot of follower F as shown in figure. During one quarter
revolution of the driving plate, the Pin and follower remain in contact and
hence the follower is turned by one quarter of a turn. During the remaining
time of one revolution of the driver, the follower remains in rest locked in
position by the circular arc.
7. Pantograph: Pantograph is used to copy the
curves in reduced or enlarged scales. Hence this mechanism finds its use in copying devices such as engraving or
profiling machines.
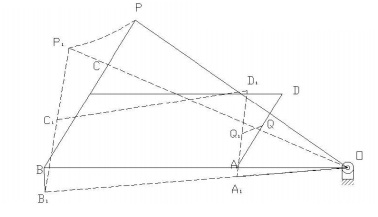
This is a
simple figure of a Pantograph. The links are pin jointed at A, B, C and D. AB
is parallel to DC and AD is parallel to BC. Link BA is extended to fixed pin O.
Q is a point on the link AD. If the motion of Q is to be enlarged then the link
BC is extended to P such that O, Q and P are in a straight line. Then it can be
shown that the points P and Q always move parallel and similar to each other
over any path straight or curved. Their motions will be proportional to their
distance from the fixed point. Let ABCD be the initial position. Suppose if
point Q moves to Q1 , then all the links and the joints will move to the new
positions (such as A moves to A1 , B moves to Q1, C moves to Q1 , D moves to D1
and P to P1 ) and the new configuration of the mechanism is shown by dotted
lines. The movement of Q (Q Q1) will be enlarged to PP1 in a definite ratio.
8. Toggle Mechanism:
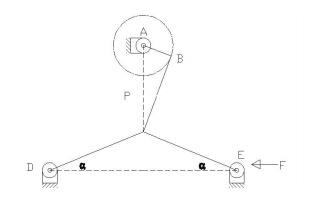
In slider
crank mechanism as the crank approaches one of its dead centre position, the
slider approaches zero. The ratio of the crank movement to the slider movement
approaching infinity is proportional to the mechanical advantage. This is the
principle used in toggle mechanism. A toggle mechanism is used when large
forces act through a short distance is required. The figure below shows a
toggle mechanism. Links CD and CE are of same length. Resolving the forces at C
vertically F Sin α =P Cos α 2
Therefore,
F = P . (because Sin α/Cos α = Tan α) 2 tan α Thus for the given value of P, as
the links CD and CE approaches collinear position (αO), the force F rises
rapidly.
9. Hooke’s joint:
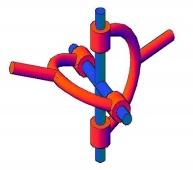
Hooke’s
joint used to connect two parallel intersecting shafts as shown in figure. This
can also be used for shaft with angular misalignment where flexible coupling
does not serve the purpose. Hence Hooke’s joint is a means of connecting two
rotating shafts whose axes lie in the same plane and their directions making a
small angle with each other. It is commonly known as Universal joint. In Europe
it is called as Cardan joint.
10. Ackermann steering gear mechanism:
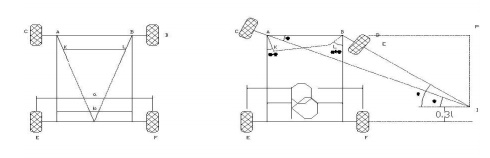
This
mechanism is made of only turning pairs and is made of only turning pairs wear
and tear of the parts is less and cheaper in manufacturing. The cross link KL
connects two short axles AC and BD of the front wheels through the short links
AK and BL which forms bell crank levers CAK and DBL respectively as shown in
fig, the longer links AB and KL are parallel and the shorter links AK and BL
are inclined at an angle α. When the vehicles steer to the right as shown in
the figure, the short link BL is turned so as to increase α, where as the link
LK causes the other short link AK to turn so as to reduce α. The fundamental
equation for correct steering is, CotΦ–Cosθ
= b / l
In the
above arrangement it is clear that the angle Φ through which AK turns is less
than the angle θ through which the BL turns and therefore the left front axle
turns through a smaller angle than the right front axle. For different angle of
turn θ, the corresponding value of Φ and (Cot Φ – Cos θ) are noted. This is
done by actually drawing the mechanism to a scale or by calculations. Therefore
for different value of the corresponding value of and are tabulated.
Approximate value of b/l for correct steering should be between 0.4 and 0.5. In
an Ackermann steering gear mechanism, the instantaneous centre I does not lie
on the axis of the rear axle but on a line parallel to the rear axle axis at an
approximate distance of 0.3l above it.
Three correct steering positions will be:
1) When
moving straight.
2) When
moving one correct angle to the right corresponding to the link ratio AK/AB and angle α.
3)
Similar position when moving to the left.
In all other positions pure rolling is not
obtainable.
Some Of
The Mechanisms Which Are Used In Day To Day Life.
BELL CRANK: GENEVA STOP:
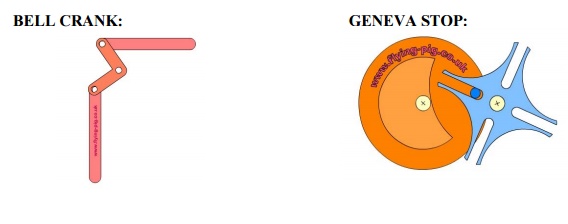
BELL CRANK: The bell crank was originally
used in large house to operate the servant’s bell, hence the name. The bell crank is used to
convert the direction of reciprocating movement. By varying the angle of the
crank piece it can be used to change the angle of movement from 1 degree to 180
degrees.
GENEVA STOP: The Geneva stop is named after
the Geneva cross, a similar shape to the main part of the mechanism. The Geneva stop is used to provide intermittent
motion, the orange wheel turns continuously, the dark blue pin then turns the
blue cross quarter of a turn for each revolution of the drive wheel. The
crescent shaped cut out in dark orange section lets the points of the cross
past, then locks the wheel in place when it is stationary. The Geneva stop
mechanism is used commonly in film cameras.
ELLIPTICAL TRAMMEL and PISTON
ARRANGEMENT
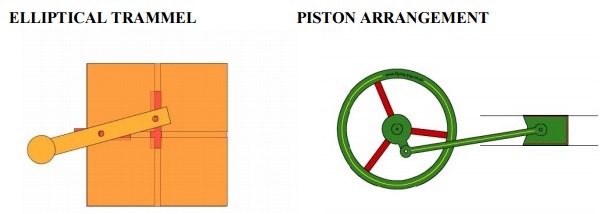
ELLIPTICAL TRAMMEL: This
fascinating mechanism converts rotary motion to reciprocating motion in two
axis. Notice that the handle traces out an ellipse rather than a circle. A
similar mechanism is used in ellipse drawing tools.
PISTON ARRANGEMENT: This
mechanism is used to convert between rotary motion and reciprocating motion, it works either way. Notice how the speed of
the piston changes. The piston starts from one end, and increases its speed. It
reaches maximum speed in the middle of its travel then gradually slows down
until it reaches the end of its travel.
RACK AND PINION and RATCHET
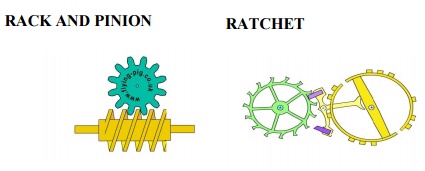
RACK AND PINION: The rack and pinion is used to
convert between rotary and linear motion.
The rack is the flat, toothed part, the pinion is the gear. Rack and pinion
can convert from rotary to linear of from linear to rotary. The diameter of the
gear determines the speed that the rack moves as the pinion turns. Rack and
pinions are commonly used in the steering system of cars to convert the rotary
motion of the steering wheel to the side to side motion in the wheels. Rack and
pinion gears give a positive motion especially compared to the friction drive
of a wheel in tarmac. In the rack and pinion railway a central rack between the
two rails engages with a pinion on the engine allowing the train to be pulled
up very steep slopes.
RATCHET: The ratchet can be used to move a
toothed wheel one tooth at a time. The part used to move the ratchet is known as the pawl. The ratchet can be used as
a way of gearing down motion. By its nature motion created by a ratchet is
intermittent. By using two pawls simultaneously this intermittent effect can be
almost, but not quite, removed. Ratchets are also used to ensure that motion
only occurs in only one direction, useful for winding gear which must not be
allowed to drop. Ratchets are also used in the freewheel mechanism of a
bicycle.
WORM GEAR WATCH ESCAPEMENT.
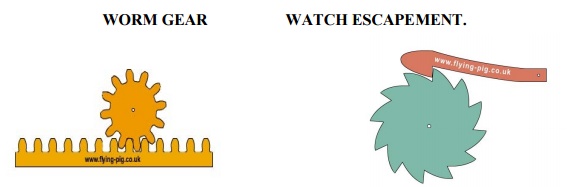
WORM GEAR: A worm is used to reduce speed.
For each complete turn of the worm shaft the gear shaft advances only one tooth of the gear. In this case, with a
twelve tooth gear, the speed is reduced by a factor of twelve. Also, the axis
of rotation is turned by 90 degrees. Unlike ordinary gears, the motion is not
reversible, a worm can drive a gear to reduce speed but a gear cannot drive a
worm to increase it. As the speed is reduced the power to the drive increases
correspondingly. Worm gears are a compact, efficient means of substantially
decreasing speed and increasing power. Ideal for use with small electric
motors.
WATCH ESCAPEMENT: The watch
escapement is the centre of the time piece. It is the escapement which divides the time into equal segments.The balance
wheel, the gold wheel, oscillates backwards and forwards on a hairspring (not
shown) as the balance wheel moves the lever is moved allowing the escape wheel
(green) to rotate by one tooth. The power comes through the escape wheel which
gives a small 'kick' to the palettes (purple) at each tick.
GEARS and CAM
FOLLOWER.
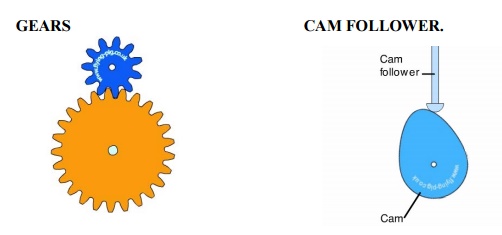
GEARS: Gears are used to change speed in
rotational movement. In the example above the blue gear has eleven teeth and the orange gear has twenty five. To turn
the orange gear one full turn the blue gear must turn 25/11 or 2.2727r turns.
Notice that as the blue gear turns clockwise the orange gear turns
anti-clockwise. In the above example the number of teeth on the orange gear is
not divisible by the number of teeth on the blue gear. This is deliberate. If
the orange gear had thirty three teeth then every three turns of the blue gear
the same teeth would mesh together which could cause excessive wear. By using
none divisible numbers the same teeth mesh only every seventeen turns of the
blue gear.
CAMS: Cams are used to convert rotary
motion into reciprocating motion. The motion created can be simple and regular or complex and irregular. As the cam turns,
driven by the circular motion, the cam follower traces the surface of the cam
transmitting its motion to the required mechanism. Cam follower design is
important in the way the profile of the cam is followed. A fine pointed
follower will more accurately trace the outline of the cam. This more accurate
movement is at the expense of the strength of the cam follower.
STEAM ENGINE.
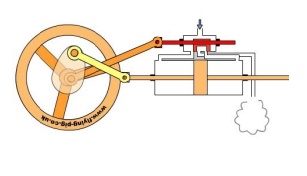
Steam
engines were the backbone of the industrial revolution. In this common design
high pressure steam is pumped alternately into one side of the piston, then the
other forcing it back and forth. The reciprocating motion of the piston is
converted to useful rotary motion using a crank.
As the
large wheel (the fly wheel) turns a small crank or cam is used to move the
small red control valve back and forth controlling where the steam flows. In
this animation the oval crank has been made transparent so that you can see how
the control valve crank is attached.
Related Topics