Chapter: Mechanical : Kinematics of Machinery : Basics of Mechanisms
Straight line generators, Design of Crank-rocker Mechanisms
Straight line generators, Design of Crank-rocker
Mechanisms:
·
Straight
Line Motion Mechanisms:
The
easiest way to generate a straight line motion is by using a sliding pair but
in precision machines sliding pairs are not preferred because of wear and tear.
Hence in such cases different methods are used to generate straight line motion
mechanisms:
1. Exact straight line motion mechanism.
a.
Peaucellier mechanism, b. Hart mechanism, c. Scott Russell mechanism
2. Approximate straight line motion mechanisms
a. Watt
mechanism, b. Grasshopper’s mechanism, c. Robert’s mechanism,
d.
Tchebicheff’s mechanism
·
a. Peaucillier
mechanism :
The pin Q
is constrained to move long the circumference of a circle by means of the link
OQ. The link OQ and the fixed link are equal in length. The pins P and Q are on
opposite corners of a four bar chain which has all four links QC, CP, PB and BQ
of equal length to the fixed pin A. i.e., link AB = link AC. The product AQ x
AP remain constant as the link OQ rotates may be proved as follows: Join BC to
bisect PQ at F; then, from the right angled triangles AFB, BFP, we have
AB=AF+FB and BP=BF+FP. Subtracting, AB-BP= AF-FP=(AF–FP)(AF+FP) = AQ x AP .
Since AB
and BP are links of a constant length, the product AQ x AP is constant.
Therefore the point P traces out a straight path normal to AR.
·
b.
Robert’s mechanism:
This is
also a four bar chain. The link PQ and RS are of equal length and the tracing
pint ‘O’ is rigidly attached to the link QR on a line which bisects QR at right
angles. The best position for O may be found by making use of the instantaneous
centre of QR. The path of O is clearly approximately horizontal in the Robert’s
mechanism.
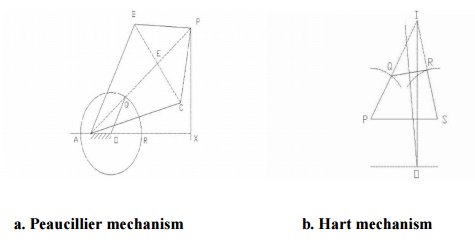
a.
Peaucillier mechanism
b. Hart
mechanism
Related Topics