Chapter: Special Electrical Machines : Switched Reluctance Motor
Voltage PWM Type Current Regulation
VOLTAGE PWM TYPE CURRENT
REGULATION
The
schematic arrangement of PWM type control circuit is shown in fig. 3.11
Principle of operation
Through
transducer (tachogenerator) the mechanical signal (speed) is converted into
electrical signal (current), which is fed from at the base of transistor T2.
Thos base current combining with collector current flows the emitter of
transistor T2 through CLR to the
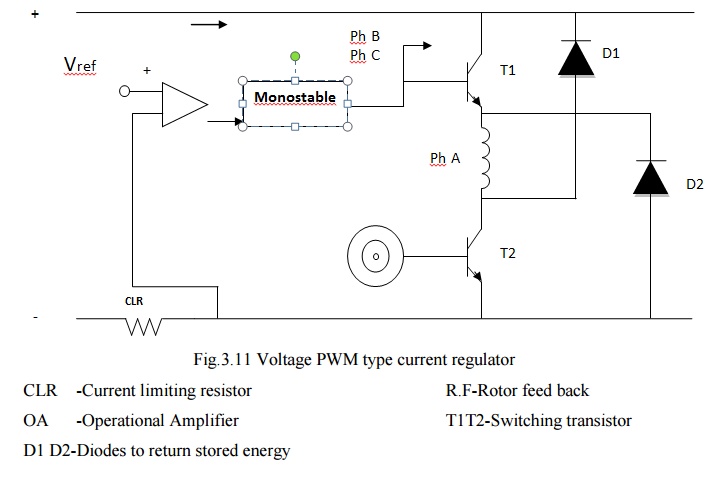
negative
of the supply. Based on the feedback signal, the voltage at phase A changes.
This feedback voltage is given as one input to the operational amplifier where
it is compared with the reference voltage, correspondingly the difference is
amplified and fed to the mono stable circuit. This circuit modulates the pulse
width of the incoming signal based on the requirement and the modulated signal
is given at the base of T1.This signal combines with collector current of T1
and flows through phase A as modulated current based on the requirement. Thus
the current is regulated or controlled using pulse width modulation and rotor
feedback.
A
desirable future of both control methods is that the current wave form tends to
retain the same shape over a wide speed range.
When the
PWM duty cycle reaches 100%, the motor speed can be increased by increasing the
conduction period. These increases eventually reach maximum values after which
the torque becomes inversely proportional to speed squared but they can
typically double the speed range at constant torque. The speed range over which
constant power can be maintained is also quite wide and very high maximum
speeds can be achieved, as in the synchronous reluctance motor and induction
motor, because there is not the limitation imposed by fixed as in PM motors.
Related Topics