Chapter: Special Electrical Machines : Switched Reluctance Motor
Hysterisis Type Current Regulation
HYSTERISIS TYPE CURRENT
REGULATION
As by
this control circuit current is maintained more or less constant like
―hysteresis‖ throughout the conduction period in each phase it is known as
hysteresis type control. Fig 3.10 (a) shows the current waveform controlled by
the hysteresis type current regulator. The schematic arrangement of the control
circuit is shown in fig 3.10 (b).
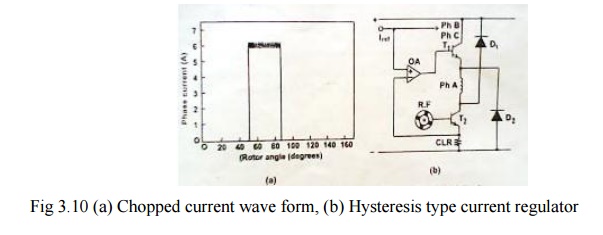
Principle of operation
As shown
in fig. 3.10(b) the transducer (a tachogenerator) is connected from the rotor
and then the output signal from the transducer is given as a feedback signal at
the base of transistor T2. From the emitter of transistor T2,
the portion of the feedback signal (current) is fed at the input of the
operational amplifier (O.A). There it is compared with the reference current
and correspondingly after amplification the feedback signal is given at the
base of transistor T1. This signal in combination with collector
current will flow from the emitter of transistor T1 through A phase
winding of the machine. Thus the current through A phase winding can be
controlled depending on the requirement. CLR is the resistance for limiting the
current as per the design.
As the
current reference increase the torque increases. At low currents the torque is
roughly proportional to current squared but at higher current it becomes more
nearly linear. At very high currents, saturation decreases the torque per
ampere again. This type of control produces a constant-torque type of
characteristics.
With
loads whose torque increases monotonically with speed, such as fans and
blowers, speed adjustment is possible without tachometer feedback but general
feedback is needed to provide accurate speed control. In some cases the pulse
train from the soft position sensor may be used for speed feedback, but only at
relative high speeds.
As low
speeds, a larger number of pulses per revolution are necessary and this can be
generated by an optical encoder or resolver for alternatively by phase-locking
a high frequency oscillator to the pulses of the commutation sensor. System
with resolver-feedback or high-resolution optical encoders can work right down
to zero speed.
The
―hysteresis type‖ current regulator may require current transducers of wide
bandwidth, but the SR drive has the advantage that they can be grounded at one
end with the other connected to the negative terminal of the lower phase leg
switch. The sensors used are shunts or hall-effect sensors or sensefets with in
build current sensing.
Related Topics