Chapter: Introduction to the Design and Analysis of Algorithms : Decrease and Conquer
Variable Size Decrease Algorithms
Variable-Size-Decrease
Algorithms
1. Computing a Median and the Selection Problem
2. Interpolation Search
3. Searching and Insertion in a Binary Search Tree
4. The Game of Nim
5. Exercises
In the
third principal variety of decrease-and-conquer, the size reduction pattern
varies from one iteration of the algorithm to another. Euclid’s algorithm for
computing the greatest common divisor (Section 1.1) provides a good example of
this kind of algorithm. In this section, we encounter a few more examples of
this variety.
Computing
a Median and the Selection Problem
The selection
problem is the problem of finding the kth
smallest element in a list of n numbers.
This number is called the kth order
statistic. Of course, for k = 1 or k
= n, we can simply scan the list in
question to find the smallest or largest element,
respectively.
A more interesting case of this problem is for k = n/2 , which
asks to find an element that is not larger than one half of the list’s elements
and not smaller than the other half. This middle value is called the median,
and it is one of the most important notions in mathematical statistics.
Obviously, we can find the kth
smallest element in a list by sorting the list first and then selecting the kth element in the output of a
sorting algorithm. The time of such an algorithm is determined by the
efficiency of the sorting algorithm used. Thus, with a fast sorting algorithm
such as mergesort (discussed in the next chapter), the algorithm’s efficiency
is in
O(n log
n).
You
should immediately suspect, however, that sorting the entire list is most
likely overkill since the problem asks not to order the entire list but just to
find its kth smallest element. Indeed, we
can take advantage of the idea of partitioning a given list around some value p of, say, its first element. In
general, this is a rearrangement of the list’s elements so that the left part
contains all the elements smaller than or equal to p, followed
by the pivot p itself,
followed by all the elements greater than or equal to p.

Of the
two principal algorithmic alternatives to partition an array, here we discuss
the Lomuto
partitioning [Ben00, p. 117]; we introduce the better known Hoare’s
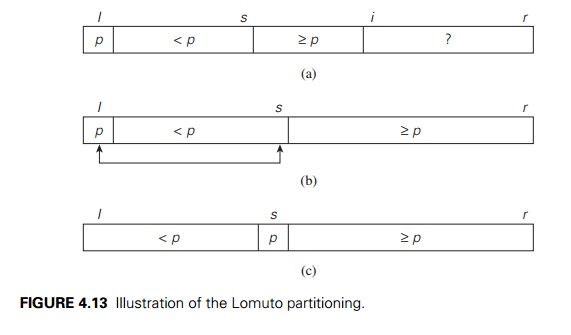
algorithm in the next chapter. To get the idea behind the Lomuto parti-tioning,
it is helpful to think of an array—or, more generally, a subarray A[l..r] (0
≤ l ≤ r ≤ n − 1)—under consideration as composed
of three contiguous seg-ments. Listed in the order they follow pivot p, they are as follows: a segment
with elements known to be smaller than p, the
segment of elements known to be greater than or equal to p, and the segment of elements yet
to be compared to p (see
Fig-ure 4.13a). Note that the segments can be empty; for example, it is always
the case for the first two segments before the algorithm starts.
Starting
with i = l + 1, the algorithm scans the subarray
A[l..r] left to
right, maintaining this structure until a partition is achieved. On each
iteration, it com-pares the first element in the unknown segment (pointed to by
the scanning index i in Figure
4.13a) with the pivot p. If A[i] ≥ p, i
is simply
incremented to expand the
segment of the elements greater than or equal to p while
shrinking the un-processed segment. If A[i] <
p, it is the segment of the elements smaller than p that needs to be expanded. This
is done by incrementing s, the
index of the last element in the first segment, swapping A[i] and A[s], and then incrementing i to point to the new first
element of the shrunk unprocessed segment. After no un-processed elements
remain (Figure 4.13b), the algorithm swaps the pivot with A[s] to
achieve a partition being sought (Figure 4.13c).
Here is
pseudocode implementing this partitioning procedure.
ALGORITHM LomutoPartition(A[l..r])
//Partitions
subarray by Lomuto’s algorithm using first element as pivot //Input: A subarray
A[l..r] of
array A[0..n − 1], defined
by its left and right
indices l and r (l ≤ r)
//Output:
Partition of A[l..r] and the
new position of the pivot p ← A[l]
s ← l
for i ← l + 1 to r do
if A[i] < p
s ← s + 1; swap(A[s], A[i]) swap(A[l],
A[s])
return s
How can
we take advantage of a list partition to find the kth
smallest element in it? Let us assume that the list is implemented as an array
whose elements are indexed starting with a 0, and let s be the partition’s split
position, i.e., the index of the array’s element occupied by the pivot after
partitioning. If s = k − 1, pivot p itself is obviously the kth smallest element, which solves
the problem. If s > k − 1,
the kth smallest element in the entire
array can be found as the kth smallest element in the left part
of the partitioned array. And if s < k − 1, it can
be found as the (k − s)th
smallest element in its right part. Thus, if we do not solve the problem
outright, we reduce its instance to a smaller one, which can be solved by the
same approach, i.e., recursively. This algorithm is called quickselect.
To find
the kth smallest element in array A[0..n − 1] by this algorithm, call
Quickselect(A[0..n − 1], k) where
ALGORITHM Quickselect(A[l..r],
k)
//Solves
the selection problem by recursive partition-based algorithm //Input: Subarray A[l..r] of
array A[0..n − 1] of orderable elements and
integer k (1 ≤ k ≤ r − l + 1)
//Output:
The value of the kth smallest element
in A[l..r]
s ← LomutoPartition(A[l..r])
//or
another partition algorithm if s = k − 1 return A[s]
else if s
> l + k − 1 Quickselect(A[l..s − 1],
k) else Quickselect(A[s + 1..r],
k − 1 − s)
In fact,
the same idea can be implemented without recursion as well. For the nonrecursive
version, we need not even adjust the value of k but just
continue until s = k − 1.
EXAMPLE Apply the
partition-based algorithm to find the median of the fol-lowing list of nine
numbers: 4, 1, 10, 8, 7, 12, 9, 2, 15. Here, k = 9/2 = 5 and our task is to find the
5th smallest element in the array.
We use
the above version of array partitioning, showing the pivots in bold.

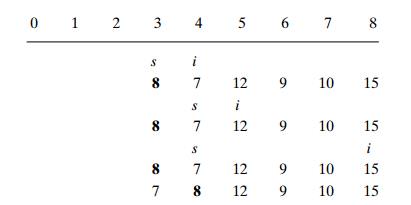
Now s = k − 1 = 4, and
hence we can stop: the found median is 8, which is
greater than 2, 1, 4, and 7 but smaller than 12, 9, 10, and 15.
How
efficient is quickselect? Partitioning an n-element
array always requires n − 1 key comparisons. If it produces
the split that solves the selection problem
without
requiring more iterations, then for this best case we obtain Cbest (n) = n − 1 ∈ (n). Unfortunately,
the algorithm can produce an extremely unbalanced
partition
of a given array, with one part being empty and the other containing n − 1
elements. In the worst case, this can happen on each of the n − 1
iterations. (For a specific example of the worst-case input, consider, say, the
case of k = n and a strictly increasing
array.) This implies that
Cworst (n) = (n − 1) + (n − 2) + .
. . + 1 = (n − 1)n/2
∈ (n2),
which
compares poorly with the straightforward sorting-based approach men-tioned in
the beginning of our selection problem discussion. Thus, the usefulness of the
partition-based algorithm depends on the algorithm’s efficiency in the average
case. Fortunately, a careful mathematical analysis has shown that the
average-case efficiency is linear. In fact, computer scientists have discovered
a more sophisti-cated way of choosing a pivot in quickselect that guarantees
linear time even in the worst case [Blo73], but it is too complicated to be
recommended for practical applications.
It is
also worth noting that the partition-based algorithm solves a somewhat more
general problem of identifying the k smallest
and n − k largest elements of a given
list, not just the value of its kth
smallest element.
Interpolation
Search
As the
next example of a variable-size-decrease algorithm, we consider an algo-rithm
for searching in a sorted array called interpolation search. Unlike binary
search, which always compares a search key with the middle value of a given
sorted array (and hence reduces the problem’s instance size by half),
interpolation search takes into account the value of the search key in order to
find the array’s element to be compared with the search key. In a sense, the
algorithm mimics the way we
search
for a name in a telephone book: if we are searching for someone named Brown, we
open the book not in the middle but very close to the beginning, unlike our
action when searching for someone named, say, Smith.
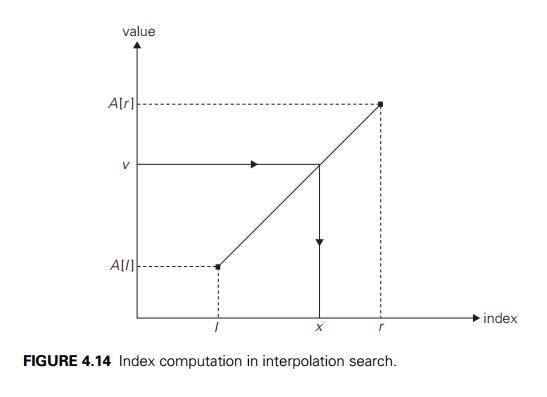
More
precisely, on the iteration dealing with the array’s portion between the
leftmost element A[l] and the rightmost element A[r], the
algorithm assumes that the array values increase linearly, i.e., along the
straight line through the points (l, A[l]) and (r, A[r]). (The accuracy of this
assumption can influence the algorithm’s efficiency but not its correctness.)
Accordingly, the search key’s value v is
compared with the element whose index is computed as (the round-off of) the x coordinate
of the point on the straight line through the points (l, A[l]) and (r,
A[r])
whose y coordinate is equal to the search
value v (Figure 4.14).
Writing
down a standard equation for the straight line passing through the points (l, A[l]) and (r,
A[r]),
substituting v for y, and
solving it for x leads to
the following formula:

The logic
behind this approach is quite straightforward. We know that the array values
are increasing (more accurately, not decreasing) from A[l] to A[r], but we do not know how they do
it. Had these values increased linearly, which is the simplest manner possible,
the index computed by formula (4.4) would be the expected location of the
array’s element with the value equal to v. Of
course, if v is not between A[l] and A[r], formula (4.4) need not be
applied (why?).
After
comparing v with A[x], the algorithm either stops (if
they are equal) or proceeds by searching in the same manner among the elements
indexed either between l and x − 1 or
between x + 1 and r, depending on whether A[x] is
smaller or larger than v. Thus,
the size of the problem’s instance is reduced, but we cannot tell a priori by
how much.
The
analysis of the algorithm’s efficiency shows that interpolation search uses
fewer than log2 log2 n + 1 key comparisons on the average
when searching in a list of n random
keys. This function grows so slowly that the number of comparisons is a very
small constant for all practically feasible inputs (see Problem 6 in this
section’s exercises). But in the worst case, interpolation search is only
linear, which must be considered a bad performance (why?).
Assessing
the worthiness of interpolation search versus that of binary search, Robert
Sedgewick wrote in the second edition of his Algorithms that binary search is probably better for smaller files
but interpolation search is worth considering for large files and for
applications where comparisons are particularly expensive or access costs are
very high. Note that in Section 12.4 we discuss a continuous counterpart of
interpolation search, which can be seen as one more example of a
variable-size-decrease algorithm.
Searching
and Insertion in a Binary Search Tree
Let us
revisit the binary search tree. Recall that this is a binary tree whose nodes
contain elements of a set of orderable items, one element per node, so that for
every node all elements in the left subtree are smaller and all the elements in
the right subtree are greater than the element in the subtree’s root. When we
need to search for an element of a given value v in such
a tree, we do it recursively in the following manner. If the tree is empty, the
search ends in failure. If the tree is not empty, we compare v with the tree’s root K(r). If they match, a desired
element is found and the search can be stopped; if they do not match, we
continue with the search in the left subtree of the root if v < K(r) and in
the right subtree if v >
K(r). Thus, on each iteration of the algorithm, the problem of searching in a binary search tree is reduced to
searching in a smaller binary search tree. The most sensible measure of the
size of a search tree is its height; obviously, the decrease in a tree’s height
normally changes from one iteration to another of the binary tree search—thus
giving us an excellent example of a variable-size-decrease algorithm.
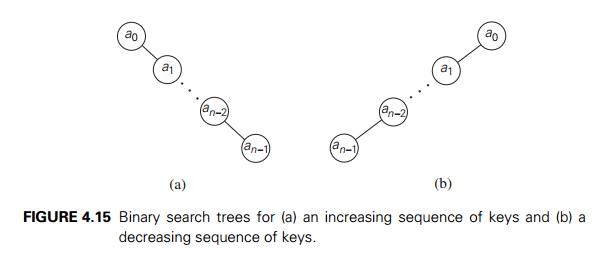
In the
worst case of the binary tree search, the tree is severely skewed. This
happens, in particular, if a tree is constructed by successive insertions of an
increasing or decreasing sequence of keys (Figure 4.15).
Obviously,
the search for an−1 in such
a tree requires n
comparisons, making the worst-case efficiency of the search operation fall into
(n).
Fortunately, the average-case efficiency turns out to be in (log n). More precisely, the number of
key comparisons needed for a search in a binary search tree built from n random keys is about 2ln n ≈ 1.39 log2 n. Since insertion of a new key
into a binary search tree is almost identical to that of searching there, it
also exemplifies the variable-size-decrease technique and has the same
efficiency characteristics as the search operation.
The Game
of Nim
There are
several well-known games that share the following features. There are two
players, who move in turn. No randomness or hidden information is permitted:
all players know all information about gameplay. A game is impartial: each
player has the same moves available from the same game position. Each of a
finite number of available moves leads to a smaller instance of the same game.
The game ends with a win by one of the players (there are no ties). The winner
is the last player who is able to move.
A prototypical
example of such games is Nim. Generally, the game is played
with several piles of chips, but we consider the one-pile version first. Thus,
there is a single pile of n chips.
Two players take turns by removing from the pile at least one and at most m chips; the number of chips taken
may vary from one move to another, but both the lower and upper limits stay the
same. Who wins the game by taking the last chip, the player moving first or
second, if both players make the best moves possible?
Let us
call an instance of the game a winning position for the player to move next if
that player has a winning strategy, i.e., a sequence of moves that results in a
victory no matter what moves the opponent makes. Let us call an instance of the
game a losing position for the player to move next if every move available for
that player leads to a winning position for the opponent. The standard approach
to determining which positions are winning and which are losing is to
investigate small values of n first.
It is logical to consider the instance of n = 0 as a losing one for the player
to move next because this player is the first one who cannot make a move. Any
instance with 1 ≤ n ≤ m chips is obviously a winning
position for the player to move next (why?). The instance with n = m + 1 chips
is a losing one because taking any allowed number of chips puts the opponent in
a winning position. (See an illustration for m = 4 in Figure 4.16.) Any instance
with m + 2 ≤ n ≤ 2m + 1 chips is a winning position for
the player to move next because there is a move that leaves the opponent with m + 1 chips,
which is a losing
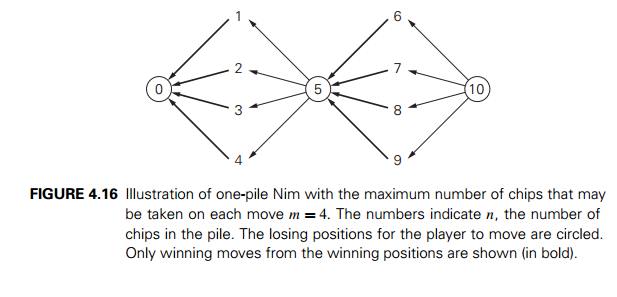
position.
2m + 2 = 2(m + 1) chips is
the next losing position, and so on. It is not difficult to see the pattern
that can be formally proved by mathematical induction: an instance with n chips is a winning position for
the player to move next if and only if n is not a
multiple of m + 1. The
winning strategy is to take n mod(m + 1) chips on every move; any
deviation from this strategy puts the opponent in a winning position.
One-pile
Nim has been known for a very long time. It appeared, in particular, as the summation
game in the first published book on recreational mathematics, authored
by Claude-Gaspar Bachet, a French aristocrat and mathematician, in 1612: a
player picks a positive integer less than, say, 10, and then his opponent and
he take turns adding any integer less than 10; the first player to reach 100
exactly is the winner [Dud70].
In
general, Nim is played with I > 1 piles
of chips of sizes n1, n2, . . . , nI . On each move, a player can take
any available number of chips, including all of them, from any single pile. The
goal is the same—to be the last player able to make a move. Note that for I = 2, it is easy to figure out who
wins this game and how. Here is a hint: the answer for the game’s instances
with n1 = n2 differs
from the answer for those with n1 = n2.
A
solution to the general case of Nim is quite unexpected because it is based on
the binary representation of the pile sizes. Let b1, b2, . . . , bI be the
pile sizes in binary. Compute their binary digital sum, also known as
the nim
sum, defined as the sum of binary digits discarding any carry. (In
other words, a binary digit si
in the
sum is 0 if the number of 1’s in the ith
position in the addends is even, and it is
1 if the number of 1’s is odd.) It turns out that an instance of Nim is a
winning one for the player to move next if and only if its nim sum contains at
least one 1; consequently, Nim’s instance is a losing instance if and only if
its nim sum contains only zeros. For example, for the commonly played instance
with n1 = 3, n2 = 4, n3 = 5, the nim sum is
Since
this sum contains a 1, the instance is a winning one for the player moving
first. To find a winning move from this position, the player needs to change
one of the three bit strings so that the new nim sum contains only 0’s. It is
not difficult to see that the only way to accomplish this is to remove two chips
from the first pile.
This
ingenious solution to the game of Nim was discovered by Harvard math-ematics
professor C. L. Bouton more than 100 years ago. Since then, mathemati-cians
have developed a much more general theory of such games. An excellent account
of this theory, with applications to many specific games, is given in the
monograph by E. R. Berlekamp, J. H. Conway, and R. K. Guy [Ber03].
Exercises
4.5
1. a. If we measure an instance size of computing the greatest common divisor of m and n by the size of the second number n, by how much can the size decrease after one iteration of Euclid’s algorithm?
Prove that an instance size will always decrease at
least by a factor of two after two successive iterations of Euclid’s algorithm.
2. Apply quickselect to find the median of the list of numbers 9, 12, 5, 17, 20, 30, 8.
3. Write pseudocode for a nonrecursive implementation of quickselect.
4. Derive the formula underlying interpolation search.
5. Give an example of the worst-case input for interpolation search and show that the algorithm is linear in the worst case.
. a. Find the smallest value of n for which log2 log2 n + 1 is greater than 6.
Determine which, if any, of the following assertions
are true:
i. log log n ∈ o(log n) ii. log log n ∈ (log n) iii.
log log n ∈ (log n)
. a. Outline an algorithm for finding the largest key in a binary search tree. Would you classify your algorithm as a variable-size-decrease algorithm?
What is the time efficiency class of your algorithm
in the worst case?
a. Outline
an algorithm for deleting a key from a binary search tree. Would you classify this algorithm as a
variable-size-decrease algorithm?
What is the time efficiency class of your algorithm
in the worst case?
9. Outline a variable-size-decrease algorithm for constructing an Eulerian circuit in a connected graph with all vertices of even degrees.
10. Mis`ere one-pile Nim Consider the so-called misere` version of the one-pile Nim, in which the player taking the last chip loses the game. All the other conditions of the game remain the same, i.e., the pile contains n chips and on each move a player takes at least one but no more than m chips. Identify the winning and losing positions (for the player to move next) in this game.
11. a. Moldy chocolate Two players take turns by breaking an m × n chocolate bar, which has one spoiled 1 × 1 square. Each break must be a single straight line cutting all the way across the bar along the boundaries between the squares. After each break, the player who broke the bar last eats the piece that does not contain the spoiled square. The player left with the spoiled square loses the game. Is it better to go first or second in this game?
b. Write an interactive program to play this game with the computer. Your program should make a winning move in a winning position and a random legitimate move in a losing position.
12. Flipping pancakes There are n pancakes all of different sizes that are stacked on top of each other. You are allowed to slip a flipper under one of the pancakes and flip over the whole stack above the flipper. The purpose is to arrange pancakes according to their size with the biggest at the bottom. (You can see a visualization of this puzzle on the Interactive Mathematics Miscellany and Puzzles site [Bog].) Design an algorithm for solving this puzzle.
13. You need to search for a given number in an n × n matrix in which every row and every column is sorted in increasing order. Can you design a O(n) algorithm for this problem? [Laa10]
Related Topics