Chapter: Introduction to the Design and Analysis of Algorithms : Decrease and Conquer
Insertion Sort
Insertion
Sort
In this
section, we consider an application of the decrease-by-one technique to sorting
an array A[0..n − 1]. Following the technique’s
idea, we assume that the smaller problem of sorting the array A[0..n − 2] has already been solved to
give us a sorted array of size n − 1: A[0] ≤ .
. . ≤ A[n − 2]. How can we take advantage of
this solution to the smaller problem to get a solution to the original problem
by taking into account the element A[n − 1]?
Obviously, all we need is to find an appropriate position for A[n − 1] among the sorted elements and
insert it there. This is usually done by scanning the sorted subarray from
right to left until the first element smaller than or equal to A[n − 1] is encountered to insert A[n − 1] right after that element. The
resulting algorithm is called straight insertion sort or simply insertion
sort.
Though
insertion sort is clearly based on a recursive idea, it is more efficient to
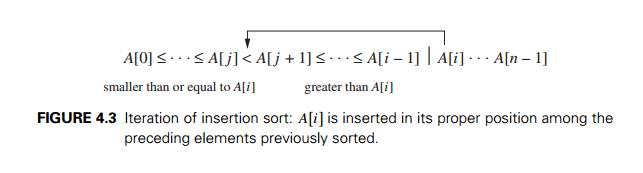
implement this algorithm bottom up, i.e., iteratively. As shown in Figure 4.3,
starting with A[1] and
ending with A[n − 1],
A[i] is inserted in its appropriate
place among the first i elements
of the array that have been already sorted (but, unlike selection sort, are
generally not in their final positions).
Here is
pseudocode of this algorithm.
ALGORITHM InsertionSort(A[0..n − 1])
//Sorts a
given array by insertion sort
//Input:
An array A[0..n − 1] of n orderable elements //Output:
Array A[0..n − 1] sorted in nondecreasing order
for i ← 1 to n − 1 do
v ← A[i]
j ← i − 1
while j ≥ 0 and A[j ] >
v do
A[j
+ 1]
← A[j
] j ← j − 1
A[j
+ 1]
← v
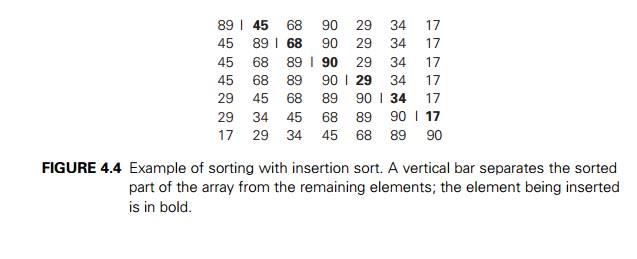
The
operation of the algorithm is illustrated in Figure 4.4.
The basic
operation of the algorithm is the key comparison A[j ] >
v. (Why not j ≥ 0? Because it is almost certainly
faster than the former in an actual computer
implementation.
Moreover, it is not germane to the algorithm: a better imple-mentation with a
sentinel—see Problem 8 in this section’s exercises—eliminates it altogether.)
The
number of key comparisons in this algorithm obviously depends on the nature of
the input. In the worst case, A[j ] >
v is executed the largest number of times, i.e., for every j = i − 1, . . . , 0. Since v = A[i], it
happens if and only if A[j ]
> A[i] for
j = i − 1, . . . , 0. (Note that we are using the
fact that on the ith iteration of insertion sort all
the elements preceding A[i] are the first i elements in the input, albeit in
the sorted order.) Thus, for the worst-case input, we get A[0] > A[1] (for i = 1), A[1]
> A[2] (for i = 2),
. . . , A[n − 2]
> A[n − 1] (for i = n − 1). In other words, the worst-case
input is an array of strictly decreasing values. The number of key comparisons
for such an input is
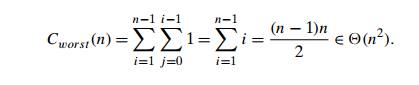
Thus, in
the worst case, insertion sort makes exactly the same number of compar-isons as
selection sort (see Section 3.1).
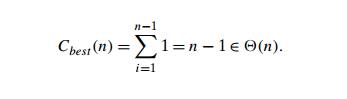
In the
best case, the comparison A[j ] >
v is executed only once on every iteration of the outer loop. It happens
if and only if A[i − 1] ≤ A[i] for every i = 1, . . . , n − 1, i.e., if the input array is
already sorted in nondecreasing order.
(Though
it “makes sense” that the best case of an algorithm happens when the problem is
already solved, it is not always the case, as you are going to see in our
discussion of quicksort in Chapter 5.) Thus, for sorted arrays, the number of
key comparisons is
This very
good performance in the best case of sorted arrays is not very useful by
itself, because we cannot expect such convenient inputs. However, almost-sorted
files do arise in a variety of applications, and insertion sort preserves its
excellent performance on such inputs.
A
rigorous analysis of the algorithm’s average-case efficiency is based on
investigating the number of element pairs that are out of order (see Problem 11
in this section’s exercises). It shows that on randomly ordered arrays,
insertion sort makes on average half as many comparisons as on decreasing
arrays, i.e.,
This
twice-as-fast average-case performance coupled with an excellent efficiency on
almost-sorted arrays makes insertion sort stand out among its principal
com-petitors among elementary sorting algorithms, selection sort and bubble
sort. In addition, its extension named shellsort, after its inventor D. L.
Shell [She59], gives us an even better algorithm for sorting moderately large
files (see Problem 12 in this section’s exercises).
Exercises
4.1
1. Ferrying soldiers A
detachment of n soldiers
must cross a wide and deep river with
no bridge in sight. They notice two 12-year-old boys playing in a rowboat by
the shore. The boat is so tiny, however, that it can only hold two boys or one
soldier. How can the soldiers get across the river and leave the boys in joint
possession of the boat? How many times need the boat pass from shore to shore?
2. Alternating
glasses
There are 2n glasses
standing next to each other in a row, the first n of them
filled with a soda drink and the remaining n glasses
empty. Make the glasses alternate in a filled-empty-filled-empty pattern in the
minimum number of glass moves. [Gar78]

Solve the same problem if 2n glasses—n with a drink and n empty—are initially in a random
order.
3. Marking cells Design an algorithm for the
following task. For any even n, mark n cells on an infinite sheet of
graph paper so that each marked cell has an odd number of marked neighbors. Two
cells are considered neighbors if they are next to each other either
horizontally or vertically but not diagonally. The marked cells must form a
contiguous region, i.e., a region in which there is a path between any pair of
marked cells that goes through a sequence of marked neighbors. [Kor05]
4. Design a decrease-by-one algorithm for generating
the power set of a set of n
elements. (The power set of a set S is the
set of all the subsets of S,
including the empty set and S itself.)
5. Consider the following algorithm to check
connectivity of a graph defined by its adjacency matrix.
ALGORITHM Connected(A[0..n − 1, 0..n − 1])
//Input:
Adjacency matrix A[0..n − 1, 0..n − 1]) of an
undirected graph G
//Output: 1 (true) if G is
connected and 0 (false) if it is not
if n = 1 return 1 //one-vertex graph
is connected by definition
else
if not Connected(A[0..n − 2, 0..n − 2]) return 0 else for j ← 0 to n − 2 do
if A[n − 1, j ] return 1 return 0
Does this
algorithm work correctly for every undirected graph with n > 0 vertices? If you answer yes,
indicate the algorithm’s efficiency class in the worst case; if you answer no,
explain why.
7.
Team
ordering You have the results of a completed round-robin tournament in which n teams
played each other once. Each game ended either with a victory for one of the
teams or with a tie. Design an algorithm that lists the teams in a sequence so
that every team did not lose the game with the team listed immediately after
it. What is the time efficiency class of your algorithm?
8. Apply insertion sort to sort the list E, X, A, M, P , L, E in alphabetical order.
a. What
sentinel should be put before the first element of an array being sorted in order to avoid checking the
in-bound condition j ≥ 0 on each iteration of the inner
loop of insertion sort?
b. Is the sentinel version in the
same efficiency class as the original version?
9. Is it possible to implement insertion sort for
sorting linked lists? Will it have the same O(n2) time
efficiency as the array version?
10. Compare the text’s implementation of insertion sort
with the following ver-sion.
ALGORITHM InsertSort2(A[0..n − 1])
for i ← 1 to n − 1 do j ← i − 1
while j ≥ 0 and A[j ] >
A[j + 1] do swap(A[j ], A[j + 1])
j ← j – 1
What is
the time efficiency of this algorithm? How is it compared to that of the
version given in Section 4.1?
11. Let A[0..n − 1] be an
array of n sortable elements. (For
simplicity, you may assume that all the elements are distinct.) A pair (A[i], A[j ]) is called an inversion
if i < j and A[i] > A[j ].
What arrays of size n have the
largest number of inversions and what is this number? Answer the same questions
for the smallest number of inversions.
Show that the average-case number of key
comparisons in insertion sort is given by the formula
12. Shellsort (more accurately Shell’s sort) is an
important sorting algorithm that works by applying insertion sort to each of
several interleaving sublists of a given list. On each pass through the list,
the sublists in question are formed by stepping through the list with an
increment hi taken
from some predefined decreasing sequence of step sizes, h1 > .
. . > hi > .
. . > 1, which must end with 1. (The
algorithm works for any such sequence, though some sequences are known to yield
a better efficiency than others. For example, the sequence 1, 4, 13, 40, 121, .
. . , used, of course, in reverse, is known to be among the best for this
purpose.)
a. Apply
shellsort to the list
S, H, E, L, L, S, O, R, T , I, S, U, S, E, F, U,
L
Is shellsort a stable sorting algorithm?
Implement shellsort, straight insertion sort,
selection sort, and bubble sort in the language of your choice and compare
their performance on random arrays of sizes 10n for n = 2, 3, 4, 5, and 6 as
well as on increasing and decreasing arrays of these sizes.
Related Topics