Chapter: Graphics and Multimedia : Three-Dimensional Concepts
Three Dimensional Display Methods
THREE DIMENSIONAL DISPLAY METHODS
To obtain display of a
three-dimensional scene that has been modeled in world coordinates. we must
first set up a coordinate reference for the "camera". This coordinate
reference defines the position and orientation for the plane of the carnera
film which is the plane we want to us to display a view of the objects in the
scene. Object descriptions are then transferred to the camera reference
coordinates and projected onto the selected display plane. We can then display
the objects in wireframe (outline) form, or we can apply lighting surface rendering techniques to shade the
visible surfaces.
PARALLEL
PROJECTION
In a parallel projection,
parallel lines in the world-coordinate scene projected into parallel lines on
the two-dimensional display plane.
Perspective Projection
Another
method for generating a view of a three-dimensional scene is to project points
to the display plane along converging paths. This causes objects farther from
the viewing position to be displayed smaller than objects of the same size that
are nearer to the viewing position.In a perspective projection, parallel lines
in a scene that are not parallel to the display plane are projected into
converging lines
DEPTH CUEING
A simple
method for indicating depth with wireframe displays is to vary the intensity of
objects according to their distance from the viewing position. The viewing
position are displayed with the highest intensities, and lines farther away are
displayed with decreasing intensities.
Visible Line and Surface
Identification
We can also clarify depth
relation ships in a wireframe display by identifying visible lines in some way.
The simplest method is to highlight the visible lines or to display them in a
different color. Another technique, commonly used for engineering drawings, is
to display the nonvisible lines as dashed lines. Another approach is to simply
remove the nonvisible lines
Surface Rendering
Added realism is attained in
displays by setting the surface intensity of objects according to the lighting
conditions in the scene and according to assigned surface characteristics.
Lighting specifications include the intensity and positions of light sources
and the general background illumination required for a scene. Surface
properties of objects include degree of transparency and how rough or smooth
the surfaces are to be. Procedures can then be applied to generate the correct
illumination and shadow regions for the scene.
Exploded and Cutaway View
Exploded and cutaway views of
such objects can then be used to show the internal structure and relationship
of the object Parts
Three-Dimensional and
Stereoscopic View
Three-dimensional views can
be obtained by reflecting a raster image from a vibrating flexible mirror. The
vibrations of the mirror are synchronized with the display of the scene on the
CRT. As the mirror vibrates, the focal length varies so that each point in the
scene is projected to a position corresponding to its depth.
Stereoscopic devices present
two views of a scene: one for the left eye and the other for the right eye.
THREE DIMENSIONAL OBJECT REPRESENTATIONS
Representation schemes for
solid objects are often divided into two broad categories
Boundary representations
(B-reps) describe a three-dimensional object as a set of surfaces that separate the object interior from the
environment.Typical examples of boundary representations are polygon facets and
spline patches.
Space-partitioning
representations are used to describe interior properties, by partitioning the
spatial region containing an object into a set of small, nonoverlapping,
contiguous solids (usually cubes).
POLYGON SURFACES
The most commonly used
boundary representation for a three-dimensional graphics object is a set of
surface polygons that enclose the object interior. Many graphics systems store
all object descriptions as sets of surface polygons. This simplifies and speeds
up the surface rendering and display of objects, since all surfaces are
described with linear equations. For this reason, polygon descriptions are
often referred to as "standard graphics objects."
Polygon Tables
We specify a polygon surface
with a set of vertex coordinates and associated attribute parameters. As
information for each polygon is input, the data are placed into tables that are
to be used in the subsequent' processing, display, and manipulation of the
objects in a scene.
Polygon
data tables can be organized into two groups:
geometric tables - attribute tables.
Geometric data tables contain
vertex coordinates and parameters to identify the spatial orientation of the
polygon surfaces.
Attribute information for an
object includes parameters specifying the degree of transparency of the object
and its surface reflectivity and texture characteristics.
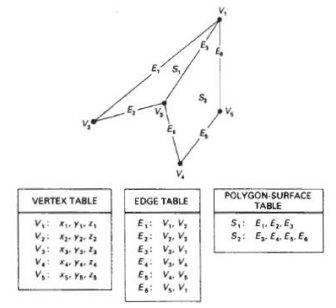
A convenient organization for
storing geometric data is to create three lists: a vertex table, an edge
table, and a polygon table.
Coordinate values for each vertex in the object
are stored in the vertex table. The edge table contains pointers back into the
vertex table to identify the vertices for each polygon edge. And thepolygon
table contains pointers back into the edge table to identify the edges for each
polygon.
Plane Equations
To produce a display of a three-dimensional
object, we must process the input data representation for the object through
several procedures.
These processing steps
include transformation of the modeling and world-coordinate descriptions to
viewing coordinates, then to device coordinates; identification of visible
surfaces; and the application of surface-rendering procedures.
The equation for 'I plane
surface can be expressed In the form Ax + By + Cz + D =0
where (r, y, z ) is any point
on the plane, and the coefficients A, B, C, and D are constants describing the
spatial objects of the plane
we select three successive
polygon vertices (x1, y1,z1), (x2, y2,z2), (x3, y3,z3),
and solve thc following set of simultaneous
linear plane equation5 for the ratios AID, B/D,and ClD
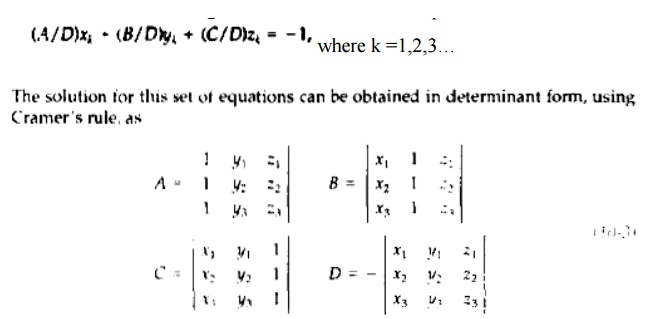
Expanding thc determinants, we can write the
calculations for the plane coefficients in the form
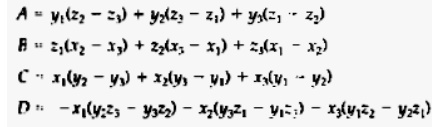
As vertex values and other
information are entered into the polygon data structure,values tor A, B, C. and D are computed for each polygon
and stored with the other polygon data.
Plane equations are used also to identify the
position of spatial points relativeto the plane surfaces of an object. For any
point (x, y, z) not on a plane
withparameters A, B, C, D, we have Ax + By+ Cz+ D != 0 We can identify the point as either inside
or outside the plane surface accordingto the sign (negative or positive) of Ax
+ By
+ Cz + D:

CURVED LINES AND SURFACES
Curve and surface equations
can be expressed in either a parametric or anonparametric form.
QUADRIC SURFACES
A frequently used class of objects is the quadric surfaces, which are described with second-degree equations (quadratics). They include spheres, ellipsoids, tori, paraboloids, and hyperboloids. Quadric surfaces, particularly spheres and ellipsoids, are common elements of graphics scenes.
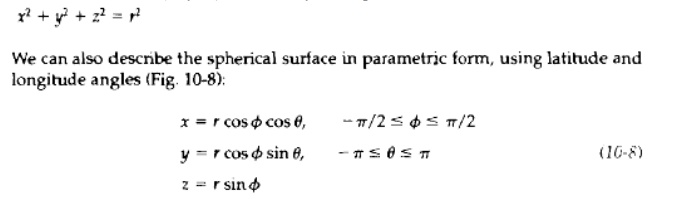
Sphere
In Cartesian coordinates, a spherical surface
with radius r centered on the coordi-nate origin is defined as the set of
points (x, y, z) that satisfy the
equation
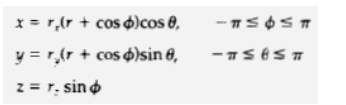
Torus
A torus is a doughnut-shaped
object, as shown in Fig. It can be generated by rotating a circle or other conic about a specified axis. The
Cartesian representation for points over the surface of a torus can be written
in the form
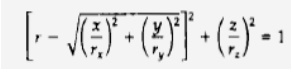
where r
is any given offset value. Parametric representations for a torus are similar
to those for an ellipse, except that angle d
extends over 360". Using latitude and longitude angles , we can describe
the toms surface as the set of points that satisfy
BLOBBY OBJECTS
Some objects do not maintain
a fixed shape, but change their surface characteristics in certain motions or
when in proximity to other opts.
Examples in this class of objects include
molecular structures, water droplets and other liquid effects, melting objects,
and muscle shapes in the human body. These
objects can bedescribed as exhibiting "blobbiness" and are often
simply referred to as blobby objects, since their shapes show a certain degree
of fluidity.
Eg:
Surface function is then defined as

And a& b – to adjust the
amount of blobbiness of an object.
SPLINE REPRESENTATIONS
In drafting terminology, a
spline is a flexible strip used to
produce a smoothcurve through a designated set
of points. Several small weights are distributed along the length of the
strip to hold it in position on the
drafting table as the curve is drawn.
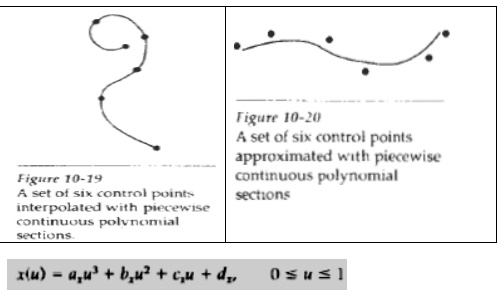
INTERPOLATION AND APPROXIMATION SPLINES
We specify a spline curver by
giving a set of coordinate positions, called control points, which indicates
the general shape of the curve. These control points are then fitted with piece
wise continuous parametric poly nomial functions in one of two ways.
When polynomial sections are
fitted so that the curve passes through
each
control point, the resulting curve is said to interpolate the set of control
points.
On the other hand, when the
polynomials are fitted to the general control-point path without necessarily
passing through any control point, the resulting curve is said to approximate
the set of control points
Spline Specifications
There are three equivalent
methods for specifying a particular spline representation:
(1) We can state the set of
boundary conditions that are imposed on the spline;
(2) we
can state the matrix that characterizes the spline; or
(3) we
can state the set of blending functions (or basis functions) that determine how
specified geometric constraints on the curve are combined to calculate
positions along the curve path we have the following parametric cubic
polynomial representation for the x coordinate along the path of a spline
section:
Boundary conditions for this curve might be
set, for example, on the endpoint coordinates x(0) and x(l) and on the
parametric first derivatives at the endpoints x'(0) and x' ( 1 ) . These four
boundary conditions are sufficient to determine the values of the four
coefficients ak, bk, ck, and dk.
=U.C
Where U
– row matrix of powers of parameter u
C –
coefficient column matrix
1.
To obtain a polynomial representation for coordinate x in terms of the geometric
constraint parameters
where gk
are the constraint parameters, such as the control-point coordinates and slope
of the curve at the control points, and BFk(u) are the polynomial blending
functions.
BEZIER CURVES AND SURFACES
This spline approximation
method was developed by the French engineer Pierre Mzier for use in the design
of Renault automobile bodies. Bezier
splines have a number of properties that make them highly useful and convenient
for curve and surface design.
Bezier Curves
In general, a Bezier curve
section can be fitted to any number of control points.
The number of control points
to be approximated and their relative position determine the degree of the
BCzier polynomial. As with the interpolation splines, a bezier curve can be
specified with boundary conditions, with a characterizing matrix, or with
blending functions.
For general Bezier curves,
the blending-function specification is the most convenient.
Suppose we are given n
+ 1 control-point positions: pk =
(xk, yk,
zk), with k varying from 0 to
n. These coordinate points can be
blended to produce the following position vector P(u), which describes the
path of an approximating Bezier polynomial function between p1, and pn.

The Bezier blending functions
BEZk,n,(u) are the Bemstein polynomials:

with BEZk,k = uk, and BEZ0.k= (1 - u ) k
vector equation represents a
set of three parametric equations
for the individual curve coordinates
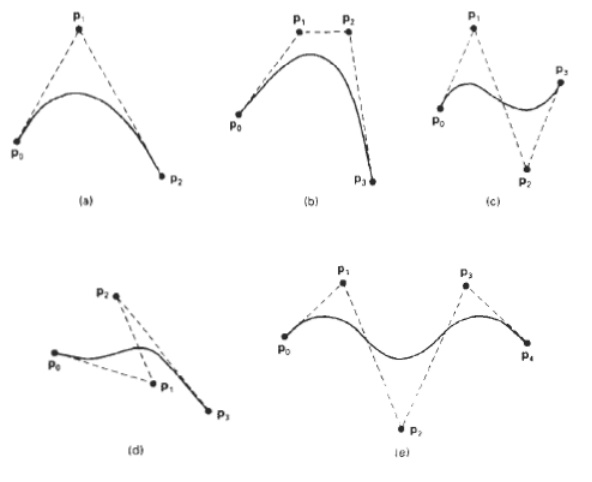
a Bezier curve is a
polynomial of degree one less than the number of control points used: Three
points generate a parabola, four points a cubiccurve, and so forth. For Example
Properties of Bezier Curves
1. A very useful property of
a Bezier curve is that it always passes through the first and last control
points. That is, the boundary conditions at the two ends of the curve are
2. Values of the parametric
first derivatives of a Bezier curve at the endpoints can be calculated from
control point coordinates as

Thus, the slope at the
beginning of the curve is along the line joining the first two control points,
and the slope at the end of the curve is along the line joining the last two
endpoints.
3. Similarly, the parametric
second derivatives o f a Bezier curve at the endpoints are calculated as

Another important property of
any Bezier curve is that it lies within the convex hull (convex polygon
boundary) of the control points. This follows from the properties of Bezier
blending functions:
They are all positive and is
always one.
Bezier Surtaces
Two sets of orthogonal Bezier
curves can be used to design an object surface by specifying by an input mesh
of control points. The parametric vector function for the Bezier surface is
formed as the Cartesian product of Bezier blending functions:

with Pj,k specifying the location of the (m + 1) by (n + I ) control
points.
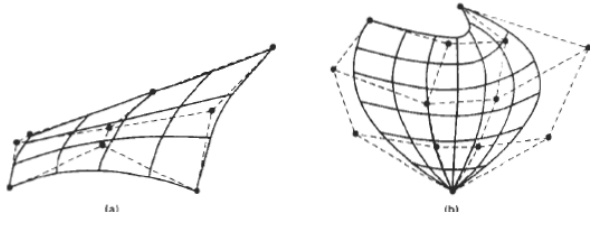
The control points are
connected by dashed lines, and the solid lines show curves of constant u
and constant v. Each curve of constant u is plotted by varying v over the
interval from 0to 1, with u
fixed at one of the values in this unit interval. Curves of constant v are
plotted similarly
B-SPLINE CURVES AND SURFACES
B-splines have two advantages
over Bezier splines:
(1)
the degree of a B-spline polynomial can be set independently of the
number of control points (with certain limitations),
(2)
B-splines allow local control over the shape of a spline curve or
surface
B-Spline Curves
We can write a general expression
for the calculation of coordinate positions along a B-spline curve in a
blending-function formulation as

where the pk are an input set of n + 1 control points.
Blending functions for
B-spline curves are defined by the Cox-deBoor recursion formulas:
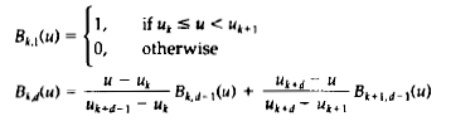
where each blendjng function
is defined over d subintervals of the total range of u. The selected set of
subinterval endpoints u, is referred to as a knot vector. B-spline curves have the following properties.
The polynomial curve has degree d - 1 and Cd-2 continuity over the rangeof u. For n + 1 control points, the curve is described with n + 1 blending functions.
Each blending function Bk,d, is defined over d subintervals of the total range of u, starting at knot value u1.
The range of parameter u 1s divided into n + d subintervals by the n + d +1 values specified in the knot vector.
With knot values labeled as [u1, u2, . . . , un,], the resulting B-spline curve is defined only in the interval from knot value ud-1 , up to knot value un+1.
Each section of the spline curve (between two successive knot values) is influenced by d control points.
Any one control point can affect the shape of at most d curve sections.
B-splines are tightly bound
to the input positions. For any value of u in the interval from knot value ud-1 to un+1 the sum over all basis functions is 1:
Ø Uniform, Periodic B-Splines
When the spacing between knot
values is constant, the resulting curve is called a uniform B-spline.
ØCubic,
Periodic B-Splines
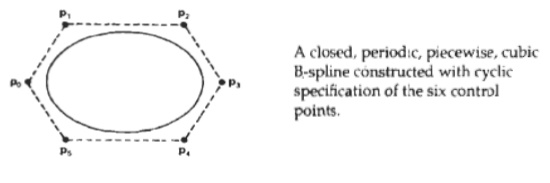
Since cubic, periodic
8-splines are commonly used in graphics packages, we consider the fornlulation
for this class of splines. Periodic splines are particularly useful for
generating certain closed curves
Ø Open Uniform B-Splines
This
class of B-splines is a cross between uniform B-splines and nonuniform
Bsplines. Sometimes it is treated as a special type of uniform 8-spline, and
sometimes it is considered to be in the nonuniform B-splines classification.
For the open uniform
B-splines, or simply open B-splines, the knot spacing is uniform except at the
ends where knot values are repeated d times.
For any values of parameters d
and n, we can generate an open uniform knot vector with integer values using
the calculations
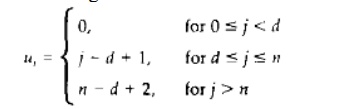
for values of] ranging from 0
to n
+ d.
With this assignment, the first d knots are assigned the value 0, and the last d
knots have the value n - d + 2.
Ø Non Uniform B-Splines
For this class of splines, we
can specify any values and intervals for the knot vector. With nonuniform
B-splines, we can choose multiple internal knot values and unequal spacing
between the knot values.
B-Spline Surfaces
We can obtain a vector point
function over a B-spline surface using the Cartesian product ofB-spline
blending functions in the form

OCTREES
Hierarchical tree structures,
called octrees, are used to represent solid objects in some graphics
systems.The tree structure is organized so that each node corresponds to a
region of three-dimensional space. This representation for solids takes
advantage of spatial coherence to reduce storage requirements for
three-dimensional objects. It also provides a convenient representation for
storing information about object interiors.
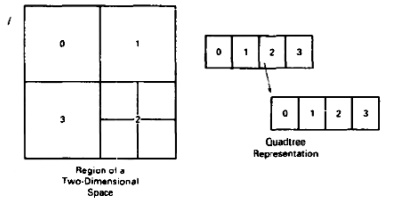
The octree encoding procedure
for a three-dimensional space is an extensionof an encoding scheme for
two-dimensional space, called quadtree encoding.Quadtrees are generated by
successively dividing a two-dimensional region (usually a square) into
quadrants. Each node in the quadtree has four data elements,one for each of the
quadrants in the region
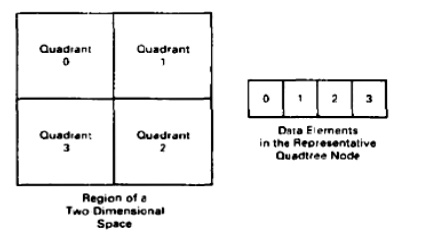
If all pixels within a
quadrant have the same color (a homogeneous quadrant), the corresponding data
element in the node stores that color.
In addition, a flag is set in
the data element to indicate that the quadrant is homogeneous. Suppose all
pixels in quadrant are found to be red. The color code for red is then placed
in data element 2 of the node. Otherwise, the quadrant is said to be
heterogeneous, and that quadrant is itself divided into quadrants
An octree encoding scheme
divides regions of three-dimensional space (usually cubes) into octants and
stores eight data elements in each node of the tree
Individual elements of a
three-dimensional space are called volume
elements, or voxels.
When all voxels in an octant are of the same type this type value is stored in the corresponding data element of the node..
Empty regions of space are represented by voxel type "void."
Any heterogeneous octant is
subdivided into octants, and the corresponding data element in the node points
to the next node in the octree.
BSP TREES
This representation scheme is
similar to octree encoding, except we now divide space into two partitions
instead of eight at each step.
With a
binary space-partitioning (BSP)
tree, we subdivide a scene into two sections at each step with aplane that can
be at any position and orientation.
In an octree encoding, the
scene is subdivided at each step with three mutually perpendicular planes
aligned with the Cartesian coordinate planes.
Related Topics