Chapter: Graphics and Multimedia : Three-Dimensional Concepts
Three-Dimensional Geometric and Modeling Transformations
Three-Dimensional Geometric and Modeling Transformations
Methods for geometric
transformations and object modeling in three dimensions are extended from
two-dimensional methods by including considerations for the z
coordinate.
We now translate an object by
specifying a three-dimensional translation vector, which determines how much
the object is tobe moved in each of the three coordinate directions. Similarly,
we scale an object with three coordinate scaling factors.
TRANSLATION
In a three-dimensional
homogeneous coordinate representation, a point is translated (Fig. 17-1) from position P = (x,
y, z) to position P' = (x',
y', z') with the matrix Operation
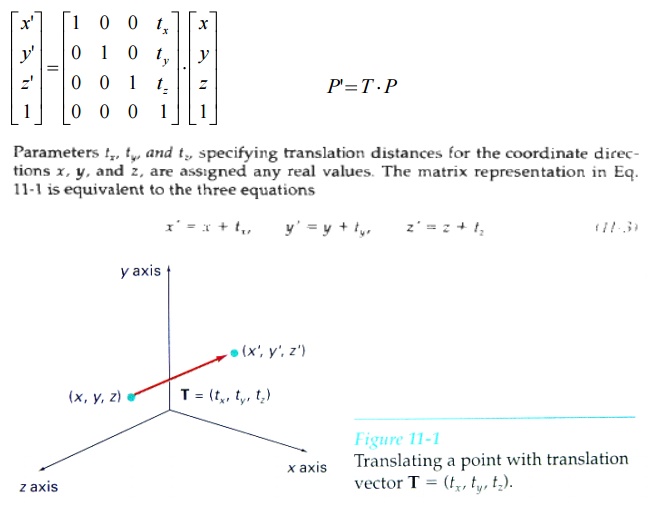
An object is translated in
three dimensions by transforming each of the defining points of the object.
ROTATION
To generate a rotation
transformation for an object, we must designate an axis of rotation (about
which the object is to be rotated) and the amount of angular rotation.
Unlike two-dimensional
applications, where all transformations are carried out in the xy plane, a three-dimensional rotation
can be specified around any line in space.
The easiest rotation axes to
handle are those that are parallel to the coordinate axes. Also, we can use
combinations of coordinate axis rotations (along with appropriate translations)
to specify any general rotation.
By convention, positive
rotation angles produce counterclockwise rotations about a coordinate axis, if
we are looking along the positive half of the axis toward the coordinate
origin.
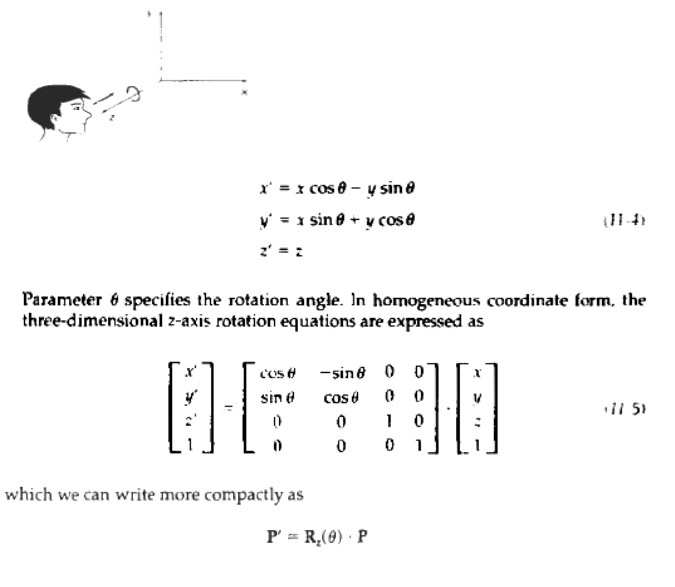
Coordinate-Axes Rotations
The two-dimensional z-axis
rotation equations are easily extended to three dimensions:
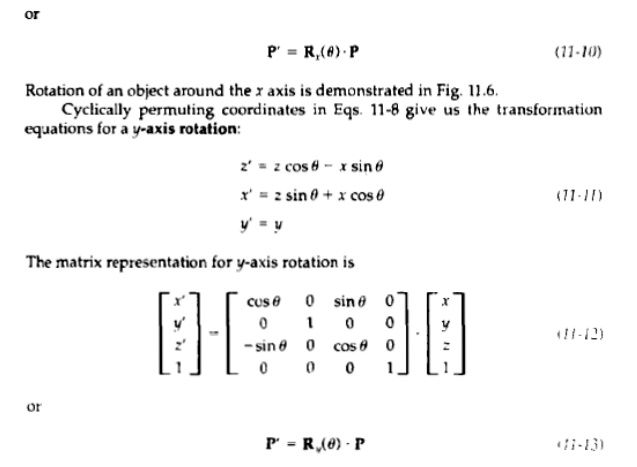
General Three-Dimensional
Rotations
A rotation matrix for any axis that does not coincide with a
coordinate axis can be set up as a composite transformation involving combinations of translations and the
coordinate-axes rotations. .
Any coordinate position P on the object in this figure is
transformed with the sequence shown as

where the composite matrix
for the transformation is

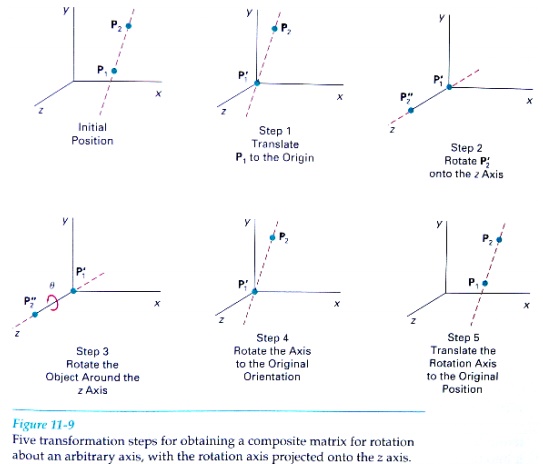
Given the specifications f or
the rotation axis and the rotation angle, we can accomplish the required
rotation in five s t e p
1 Translate the object so
that the rotation axis pass= through the coordinate origin.
2.
Rotate the object so that the axis of rotation coincides with one
of the coordinate axes.
3. Perform the specified
rotation about that coordinate axis.
4. Apply inverse rotations to
bring the rotation axis back to original orientation.
5. Apply the inverse translation
to bring the rotation axis back to its original position
A rotation axis can be
defined with coordinate positions, as in fig or with one coordinate point and
direction angles between the rotation axis and two of the coordinate axes. We
will assume that the rotation axis is defined by two points and that the direction
of rotation axes is to be counter clockwise when looking along the axis from P1 to P2
SCALING
The matrix expression tor the
scaling transformation of a position P = (x,
y, z) relative to the coordinate
origin can be written as
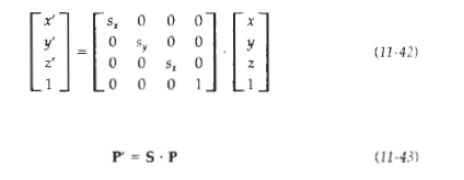
where scaling parameters sx, sy, and sz, are assigned any positive values. Explicit expressions for the
coordinate transformations for scaling relative to the origin are

Scaling
an object with transformation changes the size of the object and repositions
the object relative to the coordinate origin. Also, if the transformation
parameters are not all equal, relative dimensions in the object are changed:
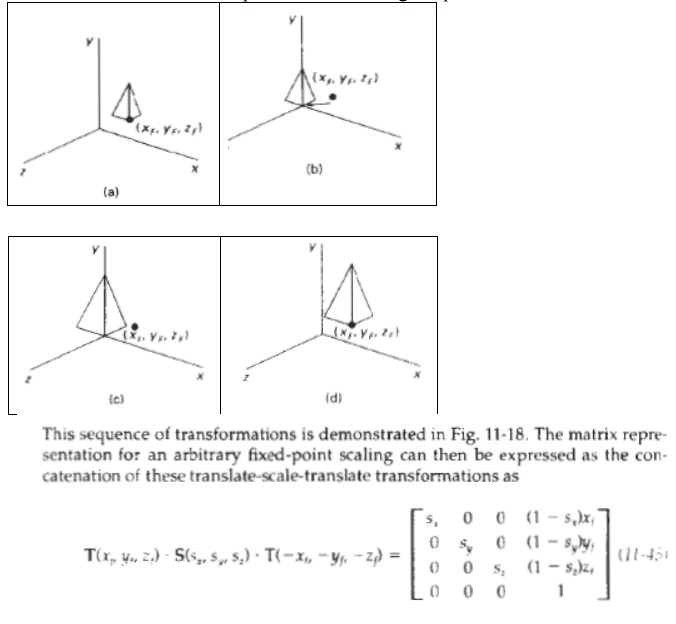
Scaling
with respect to a selected fixed position (x,
y, z,)
can be represented with the following transformation sequence:
1. Translate the fixed point
to the origin.2. Scale the object relative to the coordinate origin using Eq. 11-42.3. Translate the fixed point back
to its original position.
Reflections
A three-dimensional reflection can be performed
relative to a selected reflection axis or with respect to a selected reception
plane. In general, three-dimensional reflection matrices are set up
similarly to those for two dimensions.
Reflections
relative to a given axis are equivalent to 180 rotations about that axis.
Reflections with respect to a plane are equivalent to 160' rotations in
four-dimensional space.
When the
reflection plane is a coordinate plane (either xy, xz, or yz), we can think of the transformation as a conversion
between Left-handed and right-handed systems.
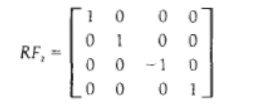
An
example of a reflection that converts coordinate specifications from
aright-handed system to a left-handed system (or vice versa)
This transformation changes
the sign of the z coordinates, leaving the x and y-coordinate values unchanged.
The matrix representation for this reflection of points relative to the xy plane is
Related Topics