Chapter: Graphics and Multimedia : Three-Dimensional Concepts
Hidden Surface Elimination
HIDDEN SURFACE ELIMINATION
Hidden Surface Removal
When drawing lots of polygons, we want to draw only those ``visible'' to viewer. There are a variety of algorithms with different strong points.
Issues:
o Online
o Device independent
o Fast
o Memory requirements
o Easy to implement in hardware
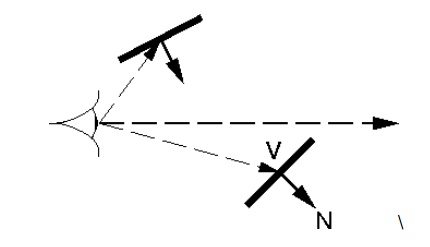
Backface CullingA simple way to perform
hidden surface is to remove all ``backfacing'' polygons. The observation is that if
polygon normal is facing away from the viewer then it is ``backfacing.'' For
solid objects, this means the polygon will not be seen by the viewer.
·
Thus, if N.V > 0 , then cull polygon.
·
Note that V is vector
from eye to point on polygon
You cannot use the view
direction for this.
Backface Culling
Not a complete solution
·
If objects not convex, need to do more work.
·
If polygons two sided (i.e., they do not enclose a volume) then we
can't use it.
·
A HUGE speed advantage if we can use it since the test is cheap and
we expect at least half the polygons will be discarded.
·
Usually performed in conjunction with a more complete hidden
surface algorithm.
·
Easy to integrate into hardware (and usually improves performance
by a factor of 2).
Painter's Algorithm
Idea: Draw polygons as an oil painter might: The farthest one
first. o Sort polygons on farthest z
o Resolve ambiguities where z's overlap
o Scan convert from largest z to smallest z
Since closest drawn last, it
will be on top (and therefore it will be seen).
Need all polygons at once in
order to sort.
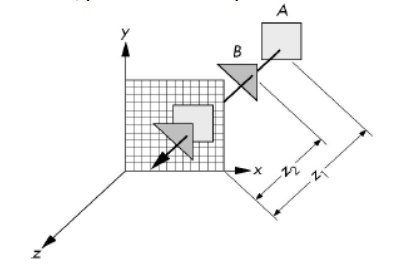
z-Buffer Algorithm
•The z or depth buffer–stores
the depth of the closest object at each pixel
found so far As we render
each polygon, compare the depth ofeach pixel to depth in z buffer
–If less, place the shade of
pixel in the color buffer and update z buffer
Function setpixel(int i, int j, rgb c, real z) If z > z-buffer(i, j)
then
z-buffer(i, j) = z
screen(i,j) = c
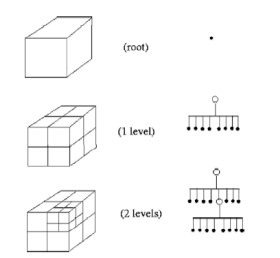
Space Partitioning
•Avoid rendering an object
when it’s unnecessary
–In many real-time
applications, we want to eliminateas many objects as possible within the application.
Octree
Why do we use BSP trees?
•Hidden surface removal
–A back-to-front painter’s
algorithm
•Partition space with Binary
Spatial Partition (BSP)Tree
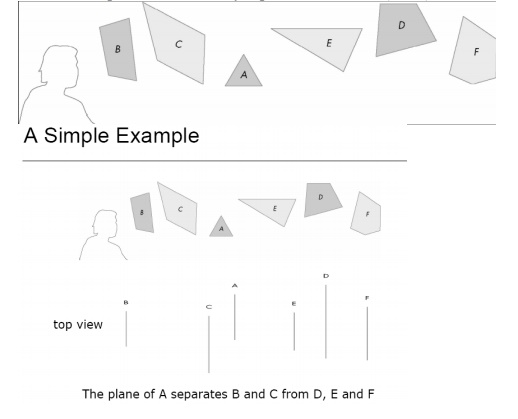
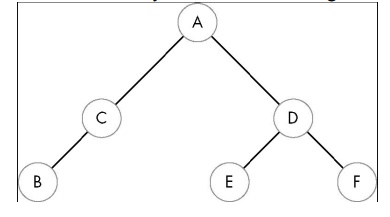
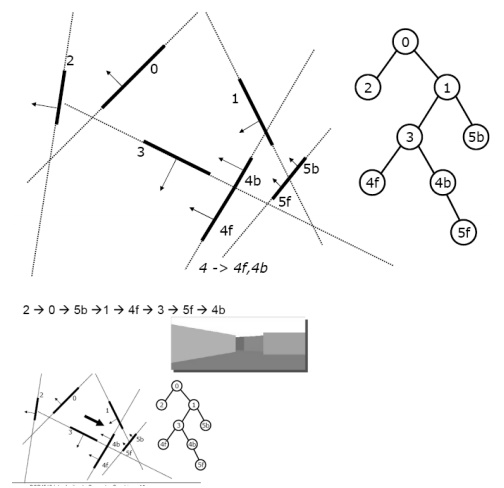
Binary Space Partitioning Tree
•Can continue recursively
–Plane of C separates B from
A
–Plane of D separates E and F
•Can put this information in
a BSP tree
–Use for visibility and
occlusion testing
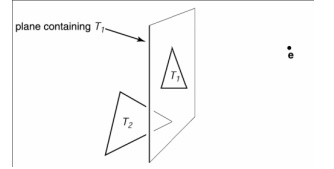
Key Idea of BSP
•Assume T2 not cross the
plane of T1
•If e and T2 on the same
side, T1 won’t block
•If e and T2 on different
sides, T2 may block
Creating a BSP tree
Related Topics