Chapter: Compilers : Principles, Techniques, & Tools : Machine-Independent Optimizations
The Principal Sources of Optimization
The Principal Sources of
Optimization
1 Causes of Redundancy
2 A Running Example: Quicksort
3 Semantics-Preserving
Transformations
4 Global Common Subexpressions
5 Copy Propagation
6 Dead-Code Elimination
7 Code Motion
8 Induction Variables and
Reduction in Strength
9 Exercises for Section 9.1
A compiler optimization must preserve the semantics of the original
program. Except in very special circumstances, once a programmer chooses and
imple-ments a particular algorithm, the compiler cannot understand enough about
the program to replace it with a substantially different and more efficient
al-gorithm. A compiler knows only how to apply relatively low-level semantic
transformations, using general facts such as algebraic identities like i + 0 = i or program semantics such as the fact that performing the same
operation on the same values yields the same result.
1. Causes of Redundancy
There are many redundant operations in a typical program. Sometimes the
redundancy is available at the source level. For instance, a programmer may
find it more direct and convenient to recalculate some result, leaving it to
the compiler to recognize that only one such calculation is necessary. But more
often, the redundancy is a side effect of having written the program in a
high-level language. In most languages (other than C or C + + , where pointer
arithmetic is allowed), programmers have no choice but to refer to elements of
an array or fields in a structure through accesses like A[i][j] or X -+ fl.
As a program is compiled, each of these high-level data-structure
accesses expands into a number of low-level arithmetic operations, such as the
computation of the location of the (i, j ) t h element of a matrix A. Accesses to the same data structure
often share many common low-level operations. Programmers are not aware of
these low-level operations and cannot eliminate the redundancies themselves. It
is, in fact, preferable from a software-engineering perspective that
programmers only access data elements by their high-level names; the programs
are easier to write and, more importantly, easier to understand and evolve. By
having a compiler eliminate the redundancies, we get the best of both worlds:
the programs are both efficient and easy to maintain.
2. A Running
Example: Quicksort
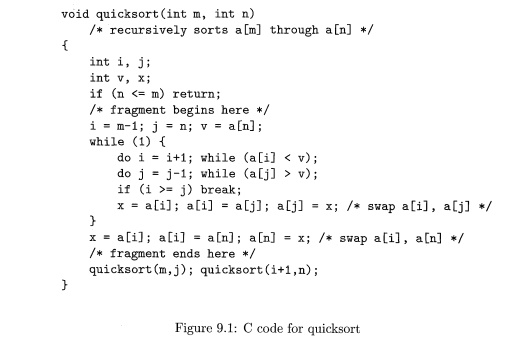
In the following, we shall use a fragment of a sorting program called quicksort to illustrate several
important code-improving transformations. The C program in Fig. 9.1 is derived
from Sedgewick,1 who discussed the hand-optimization of such a program. We shall not
discuss all the subtle algorithmic aspects of this program here, for example,
the fact that a[0) must contain the smallest of the sorted elements, and a[max] the largest.
Before we can optimize away the redundancies in address calculations,
the address operations in a program first must be broken down into low-level
arith-metic operations to expose the redundancies. In the rest of this chapter,
we as-sume that the intermediate representation consists of three-address
statements, where temporary variables are used to hold all the results of
intermediate ex-pressions. Intermediate code for the marked fragment of the
program in Fig. 9.1 is shown in Fig. 9.2.
In this example we assume that integers occupy four bytes. The
assignment x = a [ i ] is translated as in Section 6.4.4 into the two
three-address statements

in steps (20) and (21). Notice that every array access in the original
program translates into a pair of steps, consisting of a multiplication and an
array-subscripting operation. As a result, this short program fragment
translates into a rather long sequence of three-address operations.
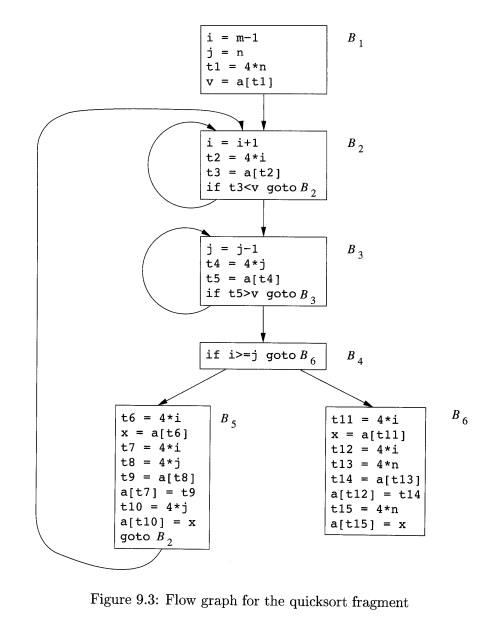
Figure 9.3 is the flow graph for the program in Fig. 9.2. Block B1 is the entry node. All conditional
and unconditional jumps to statements in Fig. 9.2 have been replaced in Fig.
9.3 by jumps to the block of which the statements are leaders, as in Section
8.4. In Fig. 9.3, there are three loops. Blocks B2 and JE?3 are loops by themselves. Blocks B2, B3, B±, and B$ together form a loop,
with B2 the only entry point.
3. Semantics-Preserving
Transformations
There are a number of ways in which a compiler can improve a program
without changing the function it computes. Common-subexpression elimination,
copy propagation, dead-code elimination, and constant folding are common
examples of such function-preserving (or semantics-preserving)
transformations; we shall consider each in turn.
Frequently, a program will include several calculations of the same
value, such as an offset in an array. As mentioned in Section 9.1.2, some of
these duplicate calculations cannot be avoided by the programmer because they
lie below the level of detail accessible within the source language. For
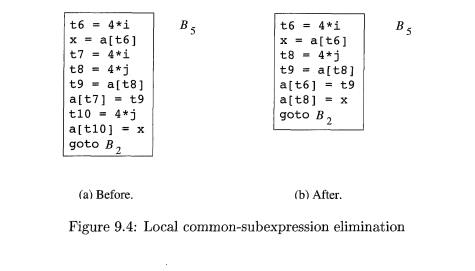
example, block £5 shown in Fig.
9.4(a) recalculates 4 * i and 4* j,
although none of these calculations were requested explicitly by the
programmer.
4. Global
Common Subexpressions
An occurrence of an expression E
is called a common subexpression if E was previously computed and the values
of the variables in E have not
changed since the previous computation. We avoid recomputing E if we can use its previously computed
value; that is, the variable x to
which the previous computation of E was
assigned has not changed in the interim.
Example 9 . 1 : The assignments to t7 and t l O in Fig. 9.4(a) compute
the common subexpressions 4 * i and 4 * j, respectively. These steps have been
eliminated in Fig. 9.4(b), which uses t6 instead of t7 and t8
instead of t l O .
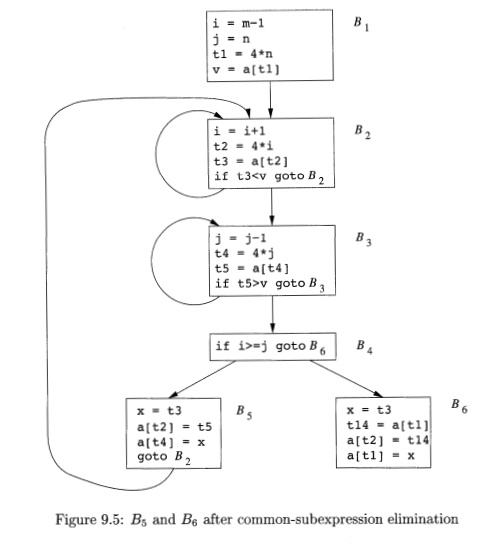
Example 9.2 : Figure 9.5 shows the result of eliminating
both global and local common subexpressions from blocks f?5 and BQ in the flow
graph of Fig. 9.3. We first discuss the transformation of B5 and then mention
some subtleties involving arrays.
After local common subexpressions are eliminated, B§ still evaluates 4*i
and 4* j, as shown in Fig. 9.4(b). Both are common subexpressions; in
particular, the three statements
2 If x has changed, it may still be possible to reuse the computation of
E if we assign its value to a new variable y, as well as to x, and use the
value of y in place of a recomputation of E.
using t4 computed in block B3. In
Fig. 9.5, observe that as control passes from the evaluation of 4 * j in B3 to B5, there is no change to j and no change to £4, so t4 can be used if
4 * j
is needed.
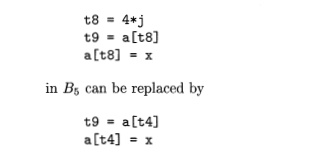
Another common subexpression
comes to light in B5 after £4 replaces t8.
The new expression a[t4] corresponds to the value of a[j] at the source
level. Not only does j retain its value as control leaves B3 and then enters
f?5, but a[j], a value computed into
a temporary t5, does too, because there are no assignments to elements of the array a in the interim. The statements
t 9 = a [ t 4 ]
a [ t 6 ] = t 9
in B5 therefore can be replaced by
a [ t 6 ] = t 5
Analogously, the value assigned to x
in block B5 of Fig. 9.4(b) is seen to be the same as the value assigned to t3 in block B2. Block B5 in Fig. 9.5 is the result of eliminating common subexpressions
corresponding to the values of the source level expressions a[i] and a[j] from B5 in Fig. 9.4(b). A similar series of transformations has been done to BQ in Fig. 9.5.
The expression a[tl] in blocks B1 and B6 of Fig. 9.5 is not considered a common subexpression, although tl can be used in both places. After control leaves B1 and before it reaches B6, it can go through B5, where there are assignments to a. Hence, a[tl] may not have the same value on reaching B6 as it did on leaving B1, and it is not safe to treat a[tl] as a common subexpression.
5. Copy Propagation
Block B$ in Fig. 9.5 can be
further improved by eliminating x,
using two new transformations. One concerns assignments of the form u = v
called copy state-ments, or copies for short. Had we gone into more
detail in Example 9.2, copies would
have arisen much sooner, because the normal algorithm for eliminating common
subexpressions introduces them, as do several other algorithms.
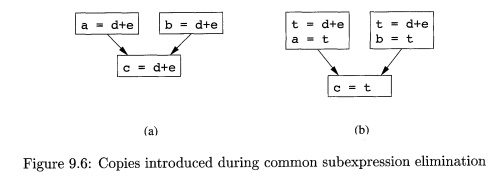
Example 9 . 3 : In order to
eliminate the common subexpression from the statement c = d+e in Fig. 9.6(a), we must use a new
variable t to hold the value of d + e. The value of variable t, instead of that
of the expression d + e, is assigned to c in Fig. 9.6(b). Since control may reach c = d+e either after the assignment to a or after
the assignment to b, it would be incorrect to replace c = d+e
by either c = a or by c = b.
The idea behind the
copy-propagation transformation
is to use
v for ii, wherever possible after the copy
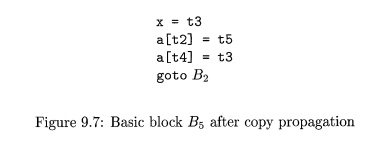
statement u = v. For example, the assignment x = t3
in block B5 of Fig. 9.5 is a copy. Copy propagation applied to B$ yields the
code in Fig. 9.7. This change may not appear to be an improvement, but, as we
shall see in Section 9.1.6, it gives us the opportunity to eliminate the
assignment to x.
6. Dead-Code
Elimination
A variable is live at a point
in a program if its value can be used subsequently; otherwise, it is dead at that point. A related idea is dead (or useless) code — statements that compute values that never get used.
While the programmer is unlikely to introduce any dead code intentionally, it
may appear as the result of previous transformations.
E x a m p l e 9 . 4 : Suppose
debug is set to TRUE or FALSE at various points in the program, and used in
statements like
i f (debug) p r i n t . . .
It may be possible for the compiler to deduce that each time the program
reaches this statement, the value of debug is FALSE. Usually, it is because
there is one particular statement
debug = FALSE
that must be the last assignment to debug prior to any tests of the
value of debug, no matter what sequence of branches the program actually takes.
If copy propagation replaces debug by FALSE, then the print statement is dead
because it cannot be reached. We can eliminate both the test and the print
operation from the object code. More generally, deducing at compile time that
the value of an expression is a constant and using the constant instead is
known as constant folding.
One advantage of copy propagation is that it often turns the copy
statement into dead code. For example, copy propagation followed by dead-code
elimination removes the assignment to x
and transforms the code in Fig 9.7 into
a[t2] = t5
a[t4] = t3
goto B2
This code is a further improvement of block B5 in Fig. 9.5.
7. Code Motion
Loops are a very important place for optimizations, especially the inner
loops where programs tend to spend the bulk of their time. The running time of
a program may be improved if we decrease the number of instructions in an inner
loop, even if we increase the amount of code outside that loop.
An important modification that decreases the amount of code in a loop is
code motion. This transformation
takes an expression that yields the same result
independent of the number of times a loop is executed (a loop-invariant computation) and
evaluates the expression before the loop. Note that the notion "before the loop" assumes the
existence of an entry for the loop, that is, one basic block to which all jumps
from outside the loop go (see Section 8.4.5).
Example 9 . 5 :
Evaluation of
limit — 2 is a
loop-invariant computation in the
following while-statement:
while
(i <= limit-2) /*
statement does not change limit */
Code motion will result in the equivalent code
t = limit-2
while
(i <= t) /* statement
does not change limit or t
*/
Now, the computation of limit — 2 is
performed once, before we enter the loop. Previously, there would be n +1
calculations of limit— 2 if we
iterated the body of the loop n times. •
8. Induction Variables and
Reduction in Strength
Another important optimization is to find induction variables in loops
and optimize their computation. A variable x
is said to be an. "induction variable" if there is a positive or
negative constant c such that each time x
is assigned, its value increases by c. For instance, i and tl are induction
variables in the loop containing B2 of Fig. 9.5. Induction variables can be computed with a single
increment (addition or subtraction) per loop iteration. The transformation of
replacing an expensive operation, such as multiplication, by a cheaper one,
such as addition, is known as strength
reduction. But induction variables not only allow us sometimes to perform a
strength reduction; often it is possible to eliminate all but one of a group of
induction variables whose values remain in lock step as we go around the loop.
When processing loops, it is useful to work "inside-out"; that
is, we shall start with the inner loops and proceed to progressively larger,
surrounding loops. Thus, we shall see how this optimization applies to our
quicksort example by beginning with one of the innermost loops: B 3
by itself. Note that the values of j and £4 remain in lock step; every
time the value of j decreases by 1, the value of t4 decreases by 4, because 4 *
j is assigned to t4. These variables, j and t4, thus form a good example of a
pair of induction variables.
When there are two or more induction variables in a loop, it may be
possible to get rid of all but one. For the inner loop of B3 in Fig.
9.5, we cannot get rid of either j or
t4 completely; t4 is used in B3 and j is used in B±. However, we can illustrate reduction
in strength and a part of the process of induction-variable elimination.
Eventually, j will be eliminated when
the outer loop consisting of blocks B?,,B3,B± and B5 is considered.
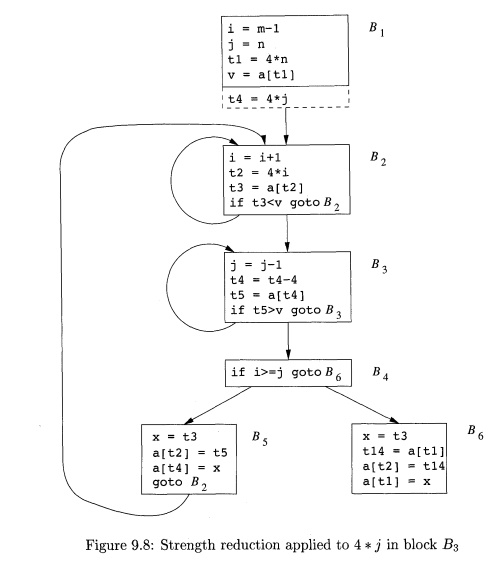
Example 9 . 6 : As the
relationship £4 = 4 * j surely holds after assignment to £4 in Fig. 9.5, and £4
is not changed elsewhere in the inner loop around B3, it follows that just after the statement j = j - 1 the
relationship £4 = 4 * j + 4 must hold. We may therefore replace the assignment
t4 = 4* j by t4 = t 4 - 4 . The only problem is that £4 does not have a value
when we enter block B3 for the first time.
Since we
must maintain the relationship £4 = 4 * j
on entry to the block B3, we place an
initialization of £4 at the end of the block where j itself is initialized, shown by the dashed addition to block B1 in Fig. 9.8. Although we have added
one more instruction, which is executed once in block Bi, the replacement of a multiplication by a subtraction will speed
up the object code if multiplication takes more time than addition or
subtraction, as is the case on many machines.
We
conclude this section with one more instance of induction-variable elimination.
This example treats i and j in the context of the outer loop containing B2, B3,
B4, and B5.
Example 9
. 7 : After reduction in strength is applied to the inner loops around B2 and
B3, the only use of i and j is to
determine the outcome of the test in block B4.
We know that the values of i and t2 satisfy the relationship t2 = 4*i,
while those of j and £4 satisfy the relationship ti = 4* j. Thus, the test t2 > t1 can substitute for
i > j. Once this replacement is made,
i in block B2 and j in block B3 become dead variables, and the assignments
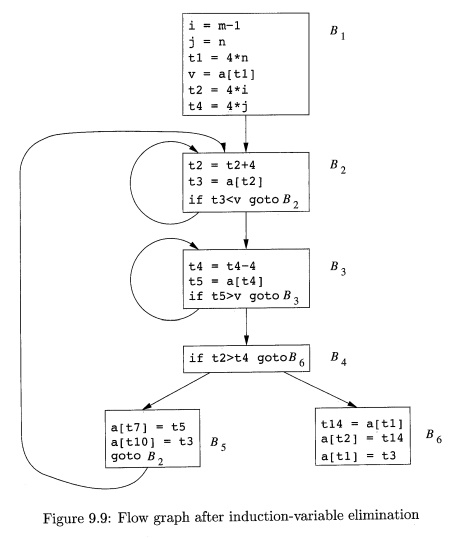
to them in these blocks become dead code that can be eliminated. The resulting flow graph is shown in Fig.
9.9.
The
code-improving transformations we have
discussed have been effective. In Fig. 9.9, the numbers of instructions in
blocks B2 and B3 have been reduced from 4 to 3, compared with the original flow graph in
Fig. 9.3. In B5, the number has been reduced
from 9 to 3, and in B6 from 8 to 3. True, B1 has
grown from four instructions to six, but Bi
is executed only once in the fragment, so the total running time is barely
affected by the size of B1.
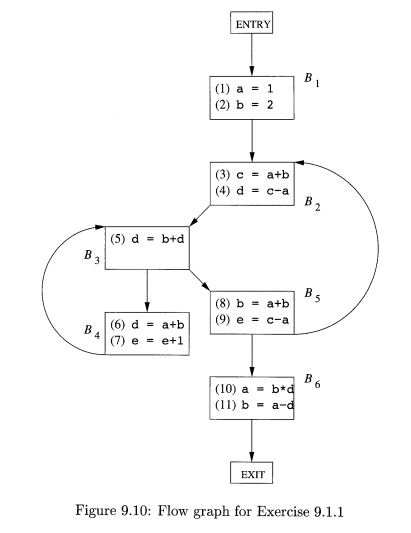
9. Exercises for Section 9 . 1
E x e r c i se 9 . 1 . 1 : For the flow graph in Fig.
9.10:
Identify the loops of the flow
graph.
Statements (1) and (2) in B1 are both copy statements, in which a and b are given constant values. For which uses of a and b can we perform
copy propagation and replace these uses of variables by uses of a constant? Do
so, wherever possible.
Identify any global common
subexpressions for each loop.
Identify any induction variables
for each loop. Be sure to take into account any constants introduced in (b).
Identify any loop-invariant
computations for each loop.
Exercise 9 . 1 . 2: Apply the
transformations of this section to the flow graph
of Fig. 8.9.
Exercise 9 . 1 . 3 : Apply the transformations of this section to your flow graphs from (a) Exercise 8.4.1; (b) Exercise
8.4.2.
Exercise 9 . 1 . 4: In Fig. 9.11 is intermediate code to compute the dot product of two vectors A and B. Optimize this
code by eliminating common subexpres-sions, performing reduction in strength on
induction variables, and eliminating all the induction variables you can.
dp = 0.
=
0
tl
= i*8
t2 = A[tl]
t3 = i*8
t4 = B[t3]
t5 = t2*t4
dp = dp+t5 i = i +1
i f i
<n goto L
Figure 9.11: Intermediate code to
compute the dot product
Related Topics