Chapter: Distributed Systems : Synchronization and Replication
Synchronizing physical clocks
Synchronizing physical clocks
Two
models of synchronization
External
synchronization: a computer‘s clock Ci
is synchronized with an external authoritative time source S, so that:
|S(t)
- Ci(t)| < D for i = 1, 2, …N over an interval, I of
real time
The
clocks Ci are accurate to within the bound D.
Internal
synchronization: the clocks of a pair of computers are synchronized with one
another so that:
| Ci(t)
- Cj(t)| < D for i = 1, 2, … N over an interval, I of
real time
The
clocks Ci and Cj agree within the
bound D.
Internally
synchronized clocks are not necessarily externally synchronized, as they may
drift collectively
if the
set of processes P is synchronized
externally within a bound D, it is
also internally synchronized within bound 2D
(worst case polarity)
Clock
correctness
Correct
clock: a hardware clock H is said
to be correct if its drift rate is within a bound ρ > 0
(e.g.
10-6 secs/ sec)
This
means that the error in measuring the interval between real times t and t’ is bounded:
(1 - ρ )
(t’ - t) ≤ H(t’) - H(t) ≤ (1 + ρ ) (t’ - t)
(where t’>t) Which forbids jumps in time readings of hardware clocks
Clock
monotonicity: weaker condition of correctness – t' > t ⇒ C(t’)
> C(t) e.g. required by Unix make
A
hardware clock that runs fast can achieve monotonicity by adjusting the values
of α and β such that Ci(t)= αHi(t) + β
Faulty
clock: a clock not keeping its correctness condition crash failure - a clock stops ticking
arbitrary failure
- any other failure e.g. jumps in time; Y2K bug
Synchronization
in a synchronous system
A
synchronous distributed system is one in which the following bounds are defined
The time
to execute each step of a process has known lower and upper bounds each message
transmitted over a channel is received within a knownbounded time (min and max)
each process has a local clock whose drift rate from real time has a known
bound
Internal
synchronization in a synchronous system
One
process p1 sends its local time t to process p2 in a message m
p2 could set its clock to t +
Ttrans where Ttrans is the time
to transmit m
Ttrans is unknown but min ≤ Ttrans ≤ max
uncertainty
u = max-min. Set clock to t + (max
- min)/2 then skew ≤ u/2
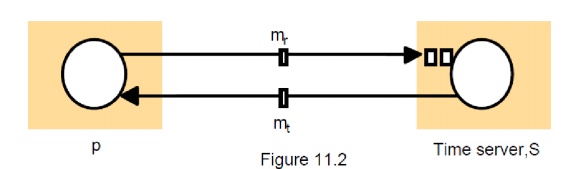
Cristian‘s
method for an asynchronous system
A time
server S receives signals from a UTC
source
Process p requests time in mr and receives t in mt from S
p sets its clock to t +
Tround/2
Accuracy
± (Tround/2 - min) :
because
the earliest time S puts t in message mt is min after p sent mr
the
latest time was min before mt arrived at p
the time
by S‘s clock when mt arrives is in the range [t+min,
t + Tround - min]
the width
of the range is Tround + 2min
The
Berkeley algorithm
Problem
with Cristian‘s algorithm
a single
time server might fail, so they suggest the use of a group of synchronized
servers
it does
not deal with faulty servers
Berkeley
algorithm (also 1989)
An
algorithm for internal synchronization of a group of computers
A master polls to collect clock values
from the others (slaves)
The
master uses round trip times to estimate the slaves‘ clock values
It takes
an average (eliminating any above some average round trip time or with faulty
clocks)
It sends
the required adjustment to the slaves (better than sending the time which
depends on the round trip time)
Measurements
15
computers, clock synchronization 20-25 millisecs drift rate < 2x10-5
If master
fails, can elect a new master to take over (not in bounded time)
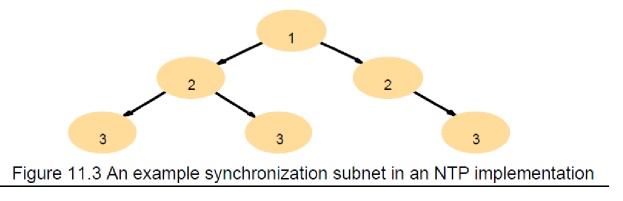
Network
Time Protocol (NTP)
A time
service for the Internet - synchronizes clients to UTC Reliability from
redundant paths, scalable, authenticates time sources Architecture
Primary
servers are connected to UTC sources
Secondary
servers are synchronized to primary servers
Synchronization
subnet - lowest level servers in users‘ computers
strata:
the hierarchy level
NTP -
synchronization of servers
The
synchronization subnet can reconfigure if failures occur
a primary
that loses its UTC source can become a secondary
a
secondary that loses its primary can use another primary
Modes of
synchronization for NTP servers:
Multicast
A server
within a high speed LAN multicasts time to others which set clocks assuming
some delay (not very accurate)
Procedure
call
A server
accepts requests from
other computers (like
Cristian‘s
algorithm)
Higher
accuracy. Useful if no hardware multicast.
Messages
exchanged between a pair of NTP peers
All modes
use UDP
Each
message bears timestamps of recent events:
Local
times of Send and Receive of previous message
Local
times of Send of current message
Recipient
notes the time of receipt Ti ( we
have Ti-3, Ti-2, Ti-1, Ti)
Estimations
of clock offset and message delay
For each
pair of messages between two servers, NTP estimates an offset oi
(between the two clocks) and a delay di (total time for the two messages,
which take t and t‘)
Ti-2 = Ti-3 + t + o and Ti = Ti-1 + t‘
- o
This
gives us (by adding the equations) : di
= t + t‘ = Ti-2 - Ti-3 + Ti - Ti-1
Also (by
subtracting the equations)
= oi + (t‘ - t )/2 where oi = (Ti-2
- Ti-3 + Ti-1 - Ti )/2
Using the
fact that t, t‘>0 it can be shown that
oi - di /2 ≤ o ≤ oi +
di /2 .
Thus oi is an estimate of the offset and di is a measure of the accuracy
Data
filtering
NTP
servers filter pairs <oi, di>, estimating reliability from
variation (dispersions), allowing them to select peers; and synchronization
based on the lowest dispersion or min di ok
A
relatively high filter dispersion represents relatively unreliable data
Accuracy
of tens of milliseconds over Internet paths (1 ms on LANs)
Related Topics