Chapter: Compilers : Principles, Techniques, & Tools : Run-Time Environments
Storage Organization
Storage Organization
From the perspective of the compiler writer, the executing target
program runs in its own logical address space in which each program value has a
location. The management and organization of this logical address space is
shared between the compiler, operating system, and target machine. The
operating system maps the logical addresses into physical addresses, which are
usually spread throughout memory.
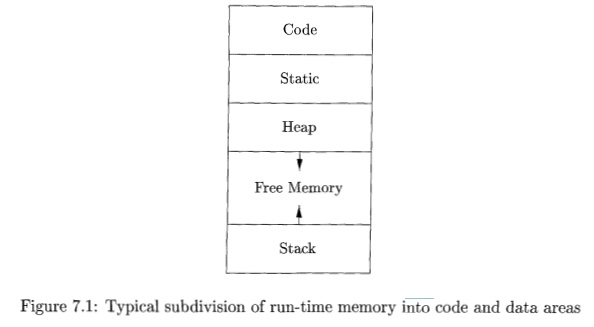
The run-time representation of an object program in the logical address
space consists of data and program areas as shown in Fig. 7.1. A compiler for a
language like C + + on an operating system like Linux might subdivide memory in
this way.
Throughout this book, we assume the run-time storage comes in blocks of
contiguous bytes, where a byte is the smallest unit of addressable memory. A
byte is eight bits and four bytes form a machine word. Multibyte objects are
stored in consecutive bytes and given the address of the first byte.
As discussed in Chapter 6, the amount of storage needed for a name is
de-termined from its type. An elementary data type, such as a character,
integer, or float, can be stored in an integral number of bytes. Storage for an
aggre-gate type, such as an array or structure, must be large enough to hold
all its components.
The storage layout for data objects is strongly influenced by the
addressing constraints of the target machine. On many machines, instructions to
add integers may expect integers to be aligned,
that is, placed at an address divisible by 4. Although an array of ten
characters needs only enough bytes to hold ten characters, a compiler may
allocate 12 bytes to get the proper alignment, leaving 2 bytes unused. Space
left unused due to alignment considerations is referred to as padding. When space is at a premium, a
compiler may pack data so that no
padding is left; additional instructions may then need to be executed at run
time to position packed data so that it can be operated on as if it were
properly aligned.
The size of the generated target code is fixed at compile time, so the
com-piler can place the executable target code in a statically determined area Code, usually in the low end of memory.
Similarly, the size of some program data objects, such as global constants, and
data generated by the compiler, such as information to support garbage
collection, may be known at compile time, and these data objects can be placed
in another statically determined area called Static. One reason for statically allocating as many data objects
as possible is that the addresses of these objects can be compiled into the
target code. In early versions of Fortran, all data objects could be allocated
statically.
To maximize the utilization of space at run time, the other two areas, Stack and Heap, are at the opposite ends of the remainder of the address
space. These areas are dynamic; their size can change as the program executes.
These areas grow towards each other as needed. The stack is used to store data
structures called activation records that get generated during procedure calls.
In practice, the stack grows towards lower addresses, the heap towards
higher. However, throughout this chapter and the next we shall assume that the
stack grows towards higher addresses so that we can use positive offsets for
notational convenience in all our examples.
As we shall see in the next section, an activation record is used to
store information about the status of the machine, such as the value of the program
counter and machine registers, when a procedure call occurs. When control
returns from the call, the activation of the calling procedure can be restarted
after restoring the values of relevant registers and setting the program
counter to the point immediately after the call. Data objects whose lifetimes
are con-tained in that of an activation can be allocated on the stack along
with other information associated with the activation.
Many programming languages allow the programmer to allocate and deal-locate
data under program control. For example, C has the functions malloc and f r e e
that can be used to obtain and give back arbitrary chunks of stor-age. The heap
is used to manage this kind of long-lived data. Section 7.4 will discuss
various memory-management algorithms that can be used to maintain the heap.
Static Versus Dynamic Storage
Allocation
The layout and allocation of data to memory locations in the run-time
envi-ronment are key issues in storage management. These issues are tricky
because the same name in a program text can refer to multiple locations at run
time. The two adjectives static and dynamic distinguish between compile time
and run time, respectively. We say that a storage-allocation decision is
static, if it can be made by the compiler looking only at the text of the
program, not at what the program does when it executes. Conversely, a decision
is dynamic if it can be decided only
while the program is running. Many compilers use some combination of the
following two strategies for dynamic storage allocation:
Stack storage. Names local to a procedure are
allocated space on a stack. We
discuss the "run-time stack" starting in Section 7.2. The stack
sup-ports the normal call/return policy for procedures.
Heap storage. Data that may outlive the call to the procedure that cre-ated it is usually allocated on a "heap" of reusable storage. We discuss heap management starting in Section 7.4. The heap is an area of virtual memory that allows objects or other data elements to obtain storage when they are created and to return that storage when they are invalidated.
To support heap management, "garbage collection" enables the
run-time system to detect useless data elements and reuse their storage, even
if the pro-grammer does not return their space explicitly. Automatic garbage
collection is an essential feature of many modern languages, despite it being a
difficult operation to do efficiently; it may not even be possible for some
languages.
Related Topics