Chapter: Compilers : Principles, Techniques, & Tools : Instruction-Level Parallelism
Software Pipelining Algorithm
Software Pipelining
1 Introduction
2 Software Pipelining of Loops
3 Register Allocation and Code Generation
4 Do-Across Loops
5 Goals and Constraints of Software Pipelining
6 A Software-Pipelining Algorithm
7 Scheduling Acyclic Data-Dependence Graphs
8 Scheduling Cyclic Dependence Graphs
9 Improvements to the Pipelining Algorithms
10Modular Variable Expansion
11 Conditional Statements
12 Hardware Support for Software Pipelining
13 Exercises for Section 10.5
As discussed in the
introduction of this chapter, numerical applications tend to have much
parallelism. In particular, they often have loops whose iterations are
completely independent of one another. These loops, known as do-all
loops, are particularly attractive from a parallelization perspective because
their iter-ations can be executed in parallel to achieve a speed-up linear in
the number of iterations in the loop. Do-all loops with many iterations have
enough par-allelism to saturate all the resources on a processor. It is up to
the scheduler to take full advantage of the available parallelism. This section
describes an al-gorithnij known as software pipelining, that schedules
an entire loop at a time, taking full advantage of the parallelism across
iterations.
1. Introduction
We shall use the do-all
loop in Example 10.12 throughout this section to explain software pipelining.
We first show that scheduling across iterations is of great importance, because there is relatively little
parallelism among operations in a single
iteration. Next, we show that loop unrolling improves performance by
overlapping the computation of unrolled iterations. However, the boundary of
the unrolled loop still poses as a barrier to code motion, and unrolling still
leaves a lot of performance "on the table." The technique of software
pipelining, on the other hand, overlaps a number of consecutive iterations
continually until it runs out of iterations. This technique allows software
pipelining to produce highly efficient and compact code.
Example 10 . 12 :
Here is a typical do-all loop:
for (i = 0; i < n; i++)
D[i]
= A[i]*B[i] + c;
Iterations in the
above loop write to different memory locations, which are themselves distinct
from any of the locations read. Therefore, there are no memory dependences between
the iterations, and all iterations can proceed in parallel.
We adopt the
following model as our target machine throughout this section. In this model
•
The machine can issue in a single
clock: one load, one store, one arithmetic operation, and one branch operation.
•
The machine has a loop-back operation
of the form
BL R,
L
which decrements register R and, unless the
result is 0, branches to loca-
tion L.
•
Memory operations have an
auto-increment addressing mode, denoted by
++
after the register. The register is automatically incremented to
point
to the next consecutive address after each access.
•
The arithmetic operations are fully
pipelined; they can be initiated every clock but their results are not
available until 2 clocks later. All other instructions have a single-clock
latency.
If iterations are
scheduled one at a time, the best schedule we can get on our machine model is
shown in Fig. 10.17. Some
assumptions about the layout of the data also also indicated in that figure:
registers Rl, R2, and R3 hold the addresses of the beginnings of arrays A, B, and
D, register R4 holds the
constant c, and register RIO holds the value n — 1, which has been computed outside the loop. The computation is
mostly serial, taking a total of 7 clocks; only the loop-back instruction is overlapped with the
last operation in the iteration.
// Rl, R2, R3
= &A, &B, &D
// R4 = c
// RIO = n-1
L: LD R5,
0(R1++) LD R6, 0(R2++) MUL R7, R5, R6 nop
ADD R8, R7, R4 nop
ST 0(R3++), R8 BL RIO, L
Figure 10.17:
Locally scheduled code for Example 10.12
In general, we get
better hardware utilization by unrolling several iterations of a loop. However,
doing so also increases the code size, which in turn can have a negative impact
on overall performance. Thus, we have to compromise, picking a number of times
to unroll a loop that gets most of the performance im-provement, yet doesn't
expand the code too much. The next example illustrates the tradeoff.
Example 10.13 : While
hardly any parallelism can be found in each iteration of the loop in Example
10.12, there is plenty of parallelism across the iterations.
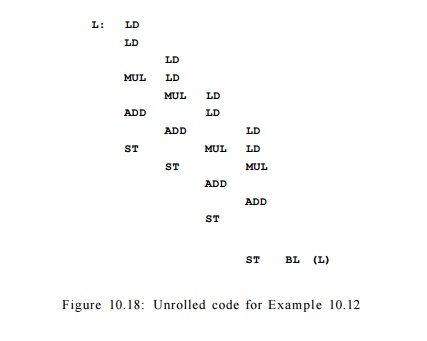
Loop unrolling places
several iterations of the loop in one large basic block, and a simple
list-scheduling algorithm can be used to schedule the operations to execute in
parallel. If we unroll the loop in our example four times and apply Algorithm
10.7 to the code, we can get the schedule shown in Fig. 10.18. (For simplicity,
we ignore the details of register allocation for now). The loop executes in 13
clocks, or one iteration every 3.25 clocks.
A loop unrolled k
times takes at least 2ft + 5 clocks, achieving a throughput of one iteration
every 2 + 5/k clocks. Thus, the more iterations we unroll, the faster
the loop runs. As n -» oo, a fully unrolled loop can execute on average
an iteration every two clocks. However, the more iterations we unroll, the
larger the code gets. We certainly cannot afford to unroll all the iterations
in a loop. Unrolling the loop 4 times produces code with 13 instructions, or
163% of the optimum; unrolling the loop 8 times produces code with 21
instructions, or 131% of the optimum. Conversely, if we wish to operate at,
say, only 110% of the optimum, we need to unroll the loop 25 times, which would
result in code with 55 instructions. •
2. Software Pipelining of Loops
Software pipelining
provides a convenient way of getting optimal resource usage and compact code at
the same time. Let us illustrate the idea with our running example.
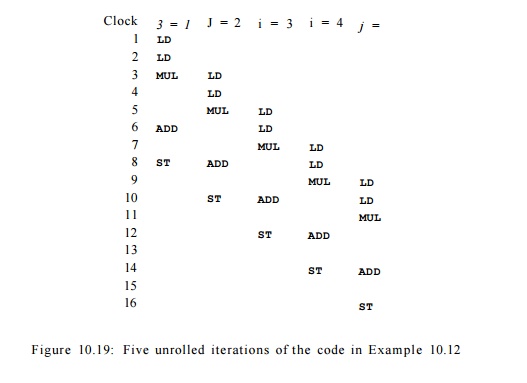
E x a m p l e 1 0 . 1
4 : In Fig. 10.19 is the code from Example 10.12 unrolled five times. (Again we
leave out the consideration of register usage.) Shown in row i are all
the operations issued at clock i; shown in column j are all the
operations from iteration j. Note that every iteration has the same
schedule relative to its beginning, and also note that every iteration is
initiated two clocks after the preceding one. It is easy to see that this
schedule satisfies all the resource and data-dependence constraints.
We observe that the
operations executed at clocks 7 and 8 are the same as those executed at clocks
9 and 10. Clocks 7 and 8 execute operations from the first four iterations in
the original program. Clocks 9 and 10 also execute operations from four
iterations, this time from iterations 2 to 5. In fact, we can keep executing
this same pair of multi-operation instructions to get the effect of retiring
the oldest iteration and adding a new one, until we run out of iterations.
Such dynamic behavior
can be encoded succinctly with the code shown in Fig. 10.20, if we assume that
the loop has at least 4 iterations. Each row in the figure corresponds to one
machine instruction. Lines 7 and 8 form a 2-clock loop, which is executed n
- 3 times, where n is the number of iterations in the original loop.

The technique
described above is called software pipelining, because it is the
software analog of a technique used for scheduling hardware pipelines. We can
think of the schedule executed by each iteration in this example as an 8-stage
pipeline. A new iteration can be started on the pipeline every 2 clocks. At the
beginning, there is only one iteration in the pipeline. As the first iteration
proceeds to stage three, the second iteration starts to execute in the first
pipeline stage.
By clock 7, the
pipeline is fully filled with the first four iterations. In the steady state,
four consecutive iterations are executing at the same time. A new iteration is
started as the oldest iteration in the pipeline retires. When we run out of
iterations, the pipeline drains, and all the iterations in the pipeline run to
completion. The sequence of instructions used to fill the pipeline, lines 1
through 6 in our example, is called the prolog; lines 7 and 8 are the steady
state; and the sequence of instructions used to drain the pipeline, lines 9
through 14, is called the epilog.
For this example, we
know that the loop cannot be run at a rate faster than 2 clocks per iteration,
since the machine can only issue one read every clock, and there are two reads
in each iteration. The software-pipelined loop above executes in 2n + 6 clocks,
where n is the number of iterations in the original loop. As n oo,
the throughput of the loop approaches the rate of one iteration every two
clocks. Thus, software scheduling, unlike unrolling, can potentially encode the
optimal schedule with a very compact code sequence.
Note that the
schedule adopted for each individual iteration is not the shortest possible.
Comparison with the locally optimized schedule shown in Fig. 10.17 shows that a
delay is introduced before the ADD operation. The delay is placed strategically so that the schedule
can be initiated every two clocks without resource conflicts. Had we stuck with
the locally compacted schedule, the initiation interval would have to be
lengthened to 4 clocks to avoid resource conflicts, and the throughput rate
would be halved. This example illustrates an important principle in pipeline
scheduling: the schedule must be chosen carefully in order to optimize the
throughput. A locally compacted schedule, while minimizing the time to complete
an iteration, may result in suboptimal throughput when pipelined.
3. Register Allocation and Code Generation
Let us begin by
discussing register allocation for the software-pipelined loop in Example
10.14.
E x a m p l e 1 0 . 1 5 : In Example 10.14, the result of the multiply operation in
the first iteration is produced at clock 3 and used at clock 6. Between these clock cycles, a new result is generated by the
multiply operation in the second iteration at clock 5; this value is used at
clock 8. The results from these two iterations must be held in different
registers to prevent them from interfering with each other. Since interference
occurs only between adjacent pairs of itera-tions, it can be avoided with the
use of two registers, one for the odd iterations and one for the even iterations.
Since the code for odd iterations is different from that for the even
iterations, the size of the steady-state loop is doubled. This code can be used
to execute any loop that has an odd number of iterations greater than or equal
to 5.
if
(N >= 5)
N2 = 3 + 2 *
floor((N-3)/2);
else
N2 = 0;
for (i = 0; i < N2;
i++) D[i] = A[i]* B[i] + c;
for (i = N2; i < N;
i++) D[i] = A[i]* B[i] + c;
Figure 10.21: Source-level unrolling of the loop from Example 10.12
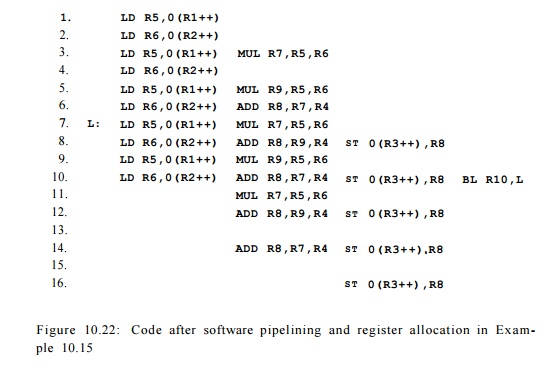
To handle loops that
have fewer than 5 iterations and loops with an even number of iterations, we
generate the code whose source-level equivalent is shown in Fig. 10.21. The first loop is pipelined, as seen in the machine-level
equivalent of Fig. 10.22. The second
loop of Fig. 10.21 need not be
optimized, since it can iterate at most four times. •
4. Do-Across Loops
Software pipelining
can also be applied to loops whose iterations share data dependences. Such
loops are known as do-across loops.
has a data dependence
between consecutive iterations, because the previous value of sum is added to A[i] to create a new value of sum. It is possible to execute the summation in 0(logn) time if
the machine can deliver sufficient parallelism, but for the sake of this
discussion, we simply assume that all the sequential dependences must be
obeyed, and that the additions must be performed in the original sequential
order. Because our assumed machine model takes two clocks to complete an ADD, the loop cannot execute faster than one iteration every two
clocks. Giving the machine more adders or multipliers will not make this loop
run any faster. The throughput of do-across loops like this one is limited by
the chain of dependences across iterations.
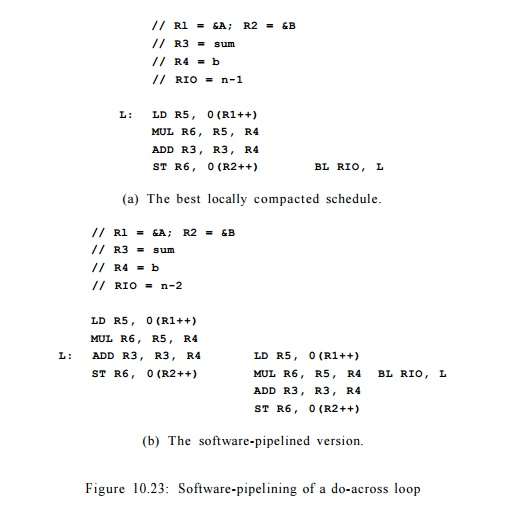
The best locally
compacted schedule for each iteration is shown in Fig. 10.23(a), and the software-pipelined code is in Fig.
10.23(b). This software-pipelined loop starts an
iteration every two clocks, and thus operates at the optimal rate.
5. Goals and Constraints of Software Pipelining
The primary goal of software pipelining is to maximize the
throughput of a long-running loop. A secondary goal is to keep the size of the
code generated reasonably small. In other words, the software-pipelined loop
should have a small steady state of the pipeline. We can achieve a small steady
state by requiring that the relative schedule of each
iteration be the same, and that the iterations be initiated at a constant
interval. Since the throughput of the loop is simply the inverse of the
initiation interval, the objective of software pipelining is to minimize this
interval.
A software-pipeline
schedule for a data-dependence graph G — (N, E) can be specified by
1.
An initiation interval T
and
2.
A relative schedule 5" that
specifies, for each operation, when that opera-tion is executed relative to the
start of the iteration to which it belongs.
Thus, an operation n in
the ith iteration, counting from 0, is executed at clock i x T+S(n). Like all
the other scheduling problems, software pipelining has two kinds of
constraints: resources and data dependences. We discuss each kind in detail
below.
Modular
Resource Reservation
Let a machine's
resources be represented by R = [ri,r2, • . . ] , where ri
is the number of units of the ith kind of resource available. If an
iteration of a loop requires ni units of resource i, then the
average initiation interval of a pipelined loop is at least m.axi(rii/ri)
clock cycles. Software pipelining requires that the initiation intervals
between any pair of iterations have a constant value. Thus, the initiation
interval must have at least maxi1ni/ri] clocks. If max^(rii/ri)
is less than 1, it is useful to unroll the source code a small number of times.
Example 10. 17 : Let
us return to our software-pipelined loop shown in Fig. 10.20. Recall that the
target machine can issue one load, one arithmetic op-eration, one store, and
one loop-back branch per clock. Since the loop has two loads, two arithmetic
operations, and one store operation, the minimum initiation interval based on
resource constraints is 2 clocks.
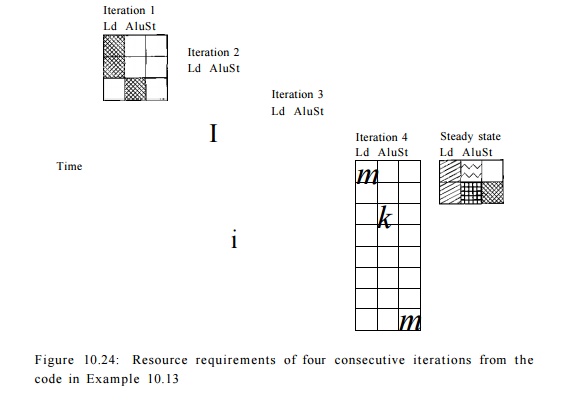
Figure 10.24 shows the resource
requirements of four consecutive iterations across time. More resources are
used as more iterations get initiated, culminating in
maximum resource commitment in the steady state. Let RT be the
resource-reservation table representing the commitment of one iteration, and
let RTS represent the commitment of the steady state. RTS
combines the commit-ment from four consecutive iterations started T
clocks apart. The commitment of row 0 in the table RT$ corresponds to
the sum of the resources committed in RT[0], RT[2], RT[4], and RT[6].
Similarly, the commitment of row 1 in the ta-ble corresponds to the sum of
the resources committed in RT[1], RT[3], RT[h], and RT[7]. That
is, the resources committed in the ith row in the steady state are given
by

We refer to the
resource-reservation table representing the steady state as the modular
resource-reservation table of the pipelined loop.
To check if the
software-pipeline schedule has any resource conflicts, we can simply check the
commitment of the modular resource-reservation table. Surely, if the commitment
in the steady state can be satisfied, so can the commitments in the prolog and
epilog, the portions of code before and after the steady-state loop. •
In general, given an
initiation interval T and a resource-reservation table of an iteration RT,
the pipelined schedule has no resource conflicts on a machine with resource
vector R if and only if RTs[i] < R for all* = 0 , 1 , . . . , T
— 1.
Data - Dependence
Constraints
Data dependences in
software pipelining are different from those we have en-countered so far
because they can form cycles. An operation may depend on the result of the same
operation from a previous iteration. It is no longer ade-quate to label a
dependence edge by just the delay; we also need to distinguish between
instances of the same operation in different iterations. We label a de-pendence
edge ni -»• n2 with label (8, d) if operation n2
in iteration i must be delayed by at least d clocks after the execution
of operation n1 in iteration i — 8. Let S, a function from
the nodes of the data-dependence graph to integers, be the software pipeline
schedule, and let T be the initiation interval target. Then

The iteration
difference, 8, must be nonnegative. Moreover, given a cycle of data-dependence
edges, at least one of the edges has a positive iteration differ-ence.
Example 10.18 :
Consider the following loop, and suppose
we do not know the values of p and q:

We must assume that any pair of *(p++) and *(q++)
accesses may refer to the same memory location. Thus, all the reads and
writes must execute in the original
sequential order. Assuming that the target machine has the same characteristics
as that described in Example 10.13, the data-dependence edges for this code are
as shown in Fig. 10.25. Note, however, that we ignore the loop-control
instructions that would have to be present, either computing and testing i, or
doing the test based on the value of Rl or R2.

The iteration difference between
related operations can be greater than one, as shown in the following example:

Here the value written in
iteration i is used two iterations later. The dependence edge between
the store of A[i] and the load of A[i — 2] thus has a difference
of 2 iterations.
The presence of data-dependence
cycles in a loop imposes yet another limit on its execution throughput. For
example, the data-dependence cycle in Fig. 10.25 imposes a delay of 4 clock
ticks between load operations from consecutive iterations. That is, loops
cannot execute at a rate faster than one iteration every 4 clocks.
The initiation interval of a pipelined loop is no smaller than
clocks.
In summary, the initiation interval
of each software-pipelined loop is bound-ed by the resource usage in each
iteration. Namely, the initiation interval must be no smaller than the ratio of
units needed of each resource and the units available
on the machine. In addition, if the loops have data-dependence cycles, then the
initiation interval is further constrained by the sum of the delays in the
cycle divided by the sum of the iteration differences. The largest of these
quantities defines a lower bound on the initiation interval.
6. A Software-Pipelining Algorithm
The goal of software pipelining is to find a schedule with the
smallest possible initiation interval. The problem is NP-complete, and can be
formulated as an integer-linear-programming problem. We have shown that if we
know what the minimum initiation interval is, the scheduling algorithm can
avoid resource con-flicts by using the modular resource-reservation table in
placing each operation. But we do not know what the minimum initiation interval
is until we can find a schedule. How do we resolve this circularity?
We know that the initiation interval must be greater than the
bound com-puted from a loop's resource requirement and dependence cycles as
discussed above. If we can find a schedule meeting this bound, we have found the
opti-mal schedule. If we fail to find such a schedule, we can try again with
larger initiation intervals until a schedule is found. Note that if heuristics,
rather than exhaustive search, are used, this process may not find the optimal
schedule.
Whether we can find a schedule near the lower bound depends on
properties of the data-dependence graph and the architecture of the target
machine. We can easily find the optimal schedule if the dependence graph is
acyclic and if every machine instruction needs only one unit of one resource.
It is also easy to find a schedule close to the lower bound if there are more
hardware resources than can be used by graphs with dependence cycles. For such
cases, it is advisable to start with the lower bound as the initial initiation-interval
target, then keep increasing the target by just one clock with each scheduling
attempt . Another possibility is to find the initiation interval using a binary
search. We can use as an upper bound on the initiation interval the length of the
schedule for one iteration produced by list scheduling.
Related Topics