Chapter: Compilers : Principles, Techniques, & Tools : Instruction-Level Parallelism
Scheduling Acyclic Data-Dependence and Cyclic Dependence Graphs
7. Scheduling Acyclic Data-Dependence Graphs
For simplicity, we assume for now that the loop to be software
pipelined contains only one basic block. This assumption will be relaxed in
Section 10.5.11.
Algorithm 10.19 : Software
pipelining an acyclic dependence graph.
INPUT : A machine-resource vector R = [ n , r 2 , . . . ] ,
where ^ is the number of units available of the ith kind of resource, and a
data-dependence graph G = (N,E). Each
operation n in N is labeled with its
resource-reservation table RTn; each edge e = m n2 in E is labeled with {Se,de)
indicating that n2 must execute
no earlier than de clocks after node
ni from the Seth preceding iteration.
OUTPUT : A software-pipelined schedule S and an initiation
interval T.
METHOD : Execute the program in Fig. 10.26.
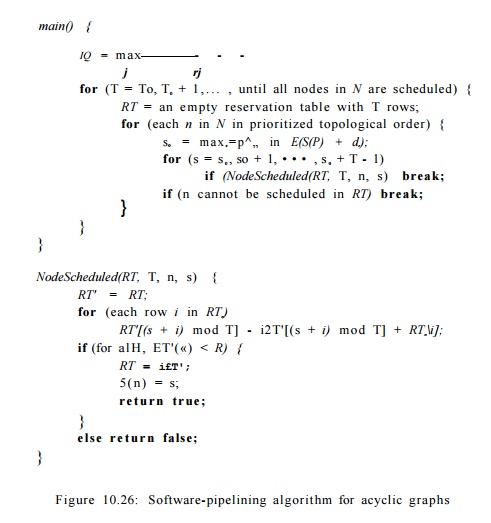
Algorithm 10.19 software
pipelines acyclic data-dependence graphs. The algorithm first finds a bound on
the initiation interval, To, based on the re-source requirements of the
operations in the graph. It then attempts to find a software-pipelined schedule
starting with To as the target initiation interval. The algorithm repeats with
increasingly larger initiation intervals if it fails to find a schedule.
The algorithm uses a list-scheduling approach in each attempt. It
uses a modular resource-reservation RT to keep track of the resource
commitment in the steady state. Operations are scheduled in topological order
so that the data dependences can always be satisfied by delaying operations. To
schedule an operation, it first finds a lower bound so according to the
data-dependence constraints. It then invokes NodeScheduled to check for
possible resource con-flicts in the steady state. If there is a resource
conflict, the algorithm tries to schedule the operation in the next clock. If
the operation is found to conflict for T consecutive clocks, because of
the modular nature of resource-conflict detec-tion, further attempts are guaranteed
to be futile. At that point, the algorithm considers the attempt a failure, and
another initiation interval is tried.
The heuristics of scheduling operations as soon as possible tends
to minimize the length of the schedule for an iteration. Scheduling an
instruction as early as possible, however, can lengthen the lifetimes of some
variables. For example, loads of data tend to be scheduled early, sometimes
long before they are used. One simple heuristic is to schedule the dependence
graph backwards because there are usually more loads than stores.
8. Scheduling Cyclic Dependence Graphs
Dependence cycles
complicate software pipelining significantly. When schedul-ing operations in an
acyclic graph in topological order, data dependences with scheduled operations
can impose only a lower bound on the placement of each operation. As a result,
it is always possible to satisfy the data-dependence con-straints by delaying operations.
The concept of "topological order" does not apply to cyclic graphs.
In fact, given a pair of operations sharing a cycle, plac-ing one operation
will impose both a lower and upper bound on the placement
of the second.
Let ni and n2
be two operations in a dependence cycle, 5 be a software-pipeline schedule, and
T be the initiation interval for the schedule. A dependence edge m
-»• n2 with label (6i,di) imposes the
following constraint on S(ni) and
S(n2):

Similarly, a
dependence edge ( n i , n 2
) with label (52,d2) imposes constraint
A strongly connected component (SCC) in a graph is a set of nodes where every node in the component can be
reached by every other node in the compo-nent. Scheduling one node in an SCC
will bound the time of every other node in the component both from above and
from below. Transitively, if there exists a path p leading from n1 to n 2 ,
then

Observe that
•
Around any cycle, the sum of the S's
must be positive. If it were 0 or negative, then it would say that an operation
in the cycle either had to
precede itself or be executed at the same clock
for all iterations.
• The schedule of
operations within an iteration is the same for all iterations; that requirement
is essentially the meaning of a "software pipeline." As a result, the
sum of the delays (second components of edge labels in a data-dependence graph)
around a cycle is a lower bound on the initiation interval T.
When we combine these
two points, we see that for any feasible initiation inter-val T, the
value of the right side of Equation (10.1) must be negative or zero. As a
result, the strongest constraints on the placement of nodes is obtained from
the simple paths — those paths that contain no cycles.
Thus, for each
feasible T, computing the transitive effect of data depen-dences on each pair
of nodes is equivalent to finding the length of the longest simple path from
the first node to the second. Moreover, since cycles cannot increase the length
of a path, we can use a simple dynamic-programming al-gorithm to find the
longest paths without the "simple-path" requirement, and be sure that
the resulting lengths will also be the lengths of the longest simple paths (see
Exercise 10.5.7).
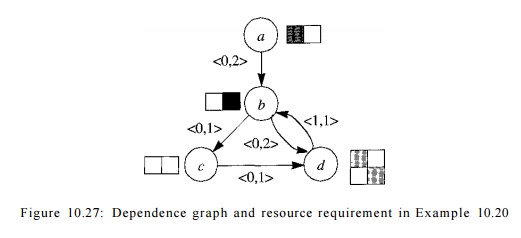
Example 10 . 20 :
Figure 10.27 shows a data-dependence graph with four nodes a,
b, c, d. Attached to each node is its resource-reservation table; attached
to each edge is its iteration difference
and delay. Assume for this example that the target machine has one unit of each
kind of resource. Since there are three uses of the first resource and two of
the second, the initiation interval must be no less than 3 clocks. There are
two SCC's in this graph: the first is a trivial component consisting of the
node a alone, and the
second consists of nodes 6, c, and d. The longest cycle, b, c, d, b, has a total delay of 3 clocks connecting nodes that are 1
iteration apart. Thus, the lower bound on the initiation interval provided by
data-dependence cycle constraints is also 3 clocks.
Placing any of 6, c,
or d in a schedule constrains all the other nodes in the component. Let T
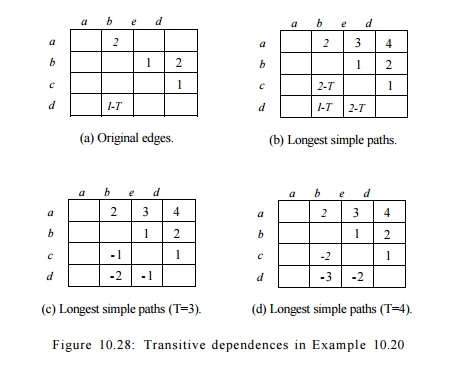
be the initiation interval. Figure 10.28 shows the transitive dependences. Part
(a) shows the delay and the iteration difference 5, for each edge. The
delay is represented directly, but S is represented by
"adding" to the delay the value — ST.
Figure 10.28(b) shows
the length of the longest simple path between two nodes, when such a path
exists; its entries are the sums of the expressions given by Fig. 10.28(a), for
each edge along the path. Then, in (c) and (d), we see the expressions of (b)
with the two relevant values of T, that is, 3 and 4, substituted for T. The
difference between the schedule of two nodes S ( n 2 ) - 5 ( n i )
must be no less than the value given in entry (ni, n 2 ) in each of
the tables (c) or (d), depending on the value of T chosen.
For instance,
consider the entry in Fig. 10.28 for the longest (simple) path from c to 6,
which is 2 — T. The longest simple path from c to b is c ->• d
->• b. The total delay is 2 along this path, and the sum of the 5's
is 1, representing the fact that the iteration number must increase by 1. Since
T is the time by which each iteration follows the previous, the clock at
which b must be scheduled is at least 2 — T clocks after
the clock at which c is scheduled. Since T is at least 3, we are really
saying that b may be scheduled T — 2 clocks before c, or
later than that clock, but not earlier.
Notice that considering
nonsimple paths from c to b does not produce a stronger constraint. We
can add to the path c —> d -» b any number of iterations of the cycle
involving d and b. If we add k such cycles, we get a path
length of 2 — T + k(3 — T), since the total delay along the path is 3,
and the sum of the 5's is 1. Since T > 3, this length can never
exceed 2 — T; i.e., the strongest lower bound on the clock of b relative
to the clock of c is 2 — T, the bound we get by considering the longest
simple path.
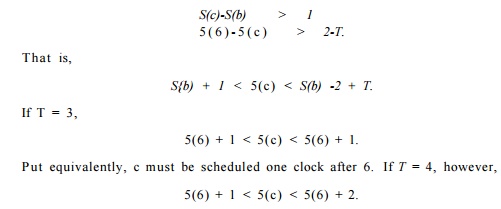
That is, c is scheduled one or two clocks after 6.
Given the all-points
longest path information, we can easily compute the range where it is legal to
place a node due to data dependences. We see that there is no slack in the case
when T = 3, and the slack increases as T increases.
Algorithm
1 0 . 2 1 : Software pipelining.
INPUT
:
A machine-resource vector R = [ri,r2:...], where r« is the number of units
available of the ith kind of resource, and a data-dependence graph G = (N,E).
Each operation n in N is labeled with its resource-reservation table RTn] each
edge e = ri1 -> n2 in E is labeled with (Se,de) indicating that n2 must
execute no earlier than de clocks after node n1 from the 5eth preceding
iteration.
OUTPUT : A software-pipelined
schedule S and an initiation interval T.
METHOD : Execute the program in Fig.
10.29. •
Algorithm 10.21 has a high-level
structure similar to that of Algorithm 10.19, which only handles acyclic
graphs. The minimum initiation interval in this case is bounded not just by
resource requirements, but also by the data-dependence cycles in the graph. The
graph is scheduled one strongly connected component at a time. By treating each
strongly connected component as a unit, edges be-tween strongly connected
components necessarily form an acyclic graph. While the top-level loop in
Algorithm 10.19 schedules nodes in the graph in topological order, the
top-level loop in Algorithm 10.21 schedules strongly connected com-ponents in
topological order. As before, if the algorithm fails to schedule all the
components, then a larger initiation interval is tried. Note that Algorithm
10.21 behaves exactly like Algorithm 10.19 if given an acyclic data-dependence
graph.
Algorithm 10.21 computes two more
sets of edges: E' is the set of all edges whose iteration difference is
0, E* is the all-points longest-path edges. That is,

for each pair of nodes (p, n),
there is an edge e in E* whose associated distance de is the length of the longest simple path
from pton, provided that there is at least one path from p to n. E* is computed for each value of T, the
initiation interval target. It is also possible to perform this computation
just once with a symbolic value of T and then substitute for T in each
iteration, as we did in Example 10.20.
Algorithm 10.21 uses
backtracking. If it fails to schedule a SCC, it tries to reschedule the entire
SCC a clock later. These scheduling attempts continue for up to T
clocks. Backtracking is important because, as shown in Example 10.20, the
placement of the first node in an SCC can fully dictate the schedule of all
other nodes. If the schedule happens not to fit with the schedule created thus
far, the attempt fails.
To schedule a SCC,
the algorithm determines the earliest time each node in the component can be
scheduled satisfying the transitive data dependences in E*. It then
picks the one with the earliest start time as the first node to
schedule. The algorithm then invokes SccScheduled to try to schedule the
component at the earliest start time. The algorithm makes at most T
attempts with successively greater start times. If it fails, then the algorithm
tries another initiation interval.
The SccScheduled
algorithm resembles Algorithm 10.19, but has three major differences.
1. The goal of SccScheduled
is to schedule the strongly connected component at the given time slot s.
If the first node of the strongly connected com-ponent cannot be
scheduled at s, SccScheduled returns false. The main function can
invoke SccScheduled again with a later time slot if that is desired.
2.
The nodes in the strongly connected
component are scheduled in topolog-ical order, based on the edges in E'.
Because the iteration differences on all the edges in E' are 0, these
edges do not cross any iteration boundaries and cannot form cycles. (Edges that
cross iteration boundaries are known as loop carried). Only loop-carried
dependences place upper bounds on where operations can be scheduled. So, this
scheduling order, along with the strategy of scheduling each operation as early
as possible, maximizes the ranges in which subsequent nodes can be scheduled.
3.
For strongly connected components,
dependences impose both a lower and upper bound on the range in which a node
can be scheduled. SccSched-uled computes these ranges and uses them to
further limit the scheduling attempts.
Example 10.22 : Let
us apply Algorithm 10.21 to the cyclic data-dependence graph in Example 10.20.
The algorithm first computes that the bound on the initiation interval for this
example is 3 clocks. We note that it is not possible to meet this lower bound.
When the initiation interval T is 3, the transitive dependences in Fig.
10.28 dictate that S(d) - S(b) = 2. Scheduling nodes b and d two clocks apart
will produce a conflict in a modular resource-reservation table of length 3.
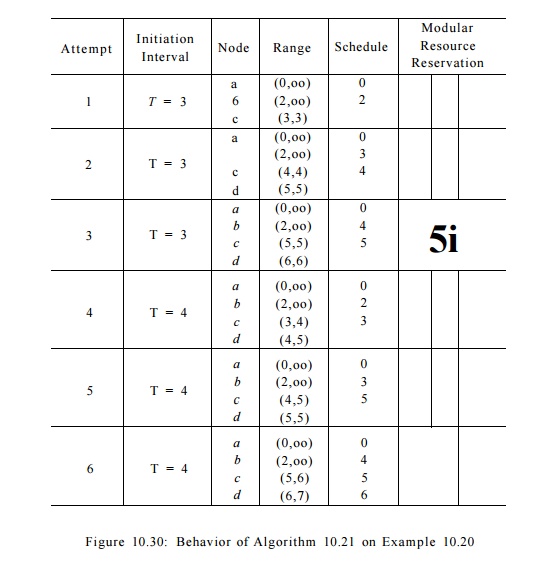
Figure 10.30 shows how Algorithm
10.21 behaves with this example. It first tries to find a schedule with a
3-clock initiation interval. The attempt starts by scheduling nodes a
and b as early as possible. However, once node b is placed in
clock 2, node c can only be placed at clock 3, which conflicts with the
resource usage of node a. That is, a and c both need the first
resource at clocks that have a remainder of 0 modulo 3.
The algorithm backtracks and
tries to schedule the strongly connected com-ponent {6, c, d} a clock
later. This time node b is scheduled at clock 3, and node c is scheduled
successfully at clock 4. Node d, however, cannot be scheduled in clock 5. That is, both b and d need the
second resource at clocks that have a remainder of 0 modulo 3. Note that it is
just a coincidence that the two con-flicts discovered so far are at clocks with
a remainder of 0 modulo 3; the conflict might have occurred at clocks with
remainder 1 or 2 in another example.
The algorithm repeats by delaying
the start of the SCC {b,c, d] by one more clock. But, as discussed earlier,
this SCC can never be scheduled with an initiation interval of 3 clocks, so the
attempt is bound to fail. At this point,
the algorithm gives up and tries to find a schedule with an initiation interval
of 4 clocks. The algorithm eventually finds the optimal schedule on its sixth
attempt.
Related Topics