Chapter: Compilers : Principles, Techniques, & Tools : Instruction-Level Parallelism
Global Code Scheduling
Global Code Scheduling
1 Primitive Code Motion
2 Upward Code Motion
3 Downward Code Motion
4 Updating Data Dependences
5 Global Scheduling Algorithms
6 Advanced Code Motion Techniques
7 Interaction with Dynamic
Schedulers
8 Exercises for Section 10.4
For a machine with a moderate amount of instruction-level
parallelism, sched-ules created by compacting individual basic blocks tend to
leave many resources idle. In order to make better use of machine resources, it
is necessary to con-sider code-generation strategies that move instructions
from one basic block to another. Strategies that consider more than one basic
block at a time are referred to as global scheduling algorithms.
To do global scheduling correctly, we must consider not only data dependences
but also control dependences. We must ensure that
1.
All
instructions in the original program are executed in the optimized program, and
2.
While the
optimized program may execute extra instructions speculatively, these
instructions must not have any unwanted side effects.
1. Primitive Code Motion
Let us first study the issues involved in moving operations around
by way of a simple example.
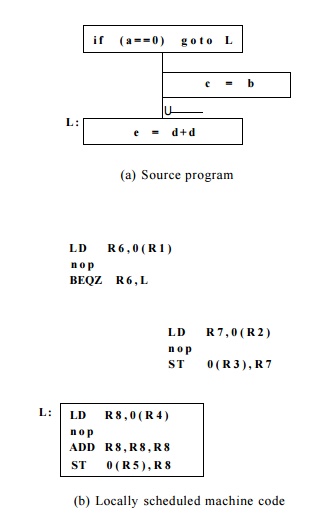
E x a m p l e 1 0 . 9 : Suppose we have a machine that can execute
any two oper-ations in a single clock. Every operation executes with a delay of
one clock, except for the load operation, which has a latency of two clocks.
For simplicity, we assume that all memory accesses in the example are valid and
will hit in the cache. Figure 10.12(a) shows a simple flow graph with three
basic blocks. The code is expanded into machine operations in Figure 10.12(b).
All the instruc-tions in each basic block must execute serially because of data
dependences; in fact, a no-op instruction has to be inserted in every basic
block.
Assume that the addresses of variables a, b, c, d,
and e are distinct and that those addresses are stored in registers Rl through R5, respectively. The com-putations from different basic blocks
therefore share no data dependences. We observe that all the operations in
block B3 are executed regardless of whether the branch is
taken, and can therefore be executed in parallel with operations from block B1.
We cannot move operations from B1 down to B3, because they
are needed to determine the outcome of the branch.
Operations in block B2 are
control-dependent on the test in block B1. We can perform the load from B2 speculatively
in block B1 for free and shave two clocks from the execution time
whenever the branch is taken.
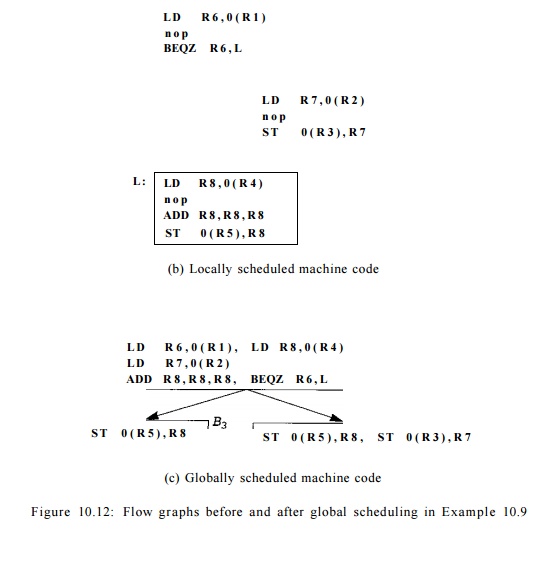
Stores should
not be performed speculatively because they overwrite the old value in a memory
location. It is possible, however, to
delay a store operation. We cannot simply place the store operation from block
B2 in block B3, because it should only be executed if the flow of control
passes through block B2. However, we can place the store operation in a
duplicated copy of B3. Figure 10.12(c) shows such an optimized schedule. The optimized
code executes in 4 clocks, which is the same as the time it takes to execute B3
alone.
Example 10.9 shows that it is possible to move
operations up and down an execution
path. Every pair of basic blocks in this
example has a different "dominance relation," and thus the
considerations of when and how instructions can be moved between each pair are
different. As discussed in Section
9.6.1, a block B is said to dominate block B' if every path from the entry of the control-flow graph to B'
goes through B. Similarly, a block
B postdominates block B' if every
path from B' to the exit of the graph goes through B. When B dominates B' and B' postdominates B,
we say that B and B' are control equivalent, meaning that one is executed when
and only when the other is. For the example in Fig. 10.12, assuming Bx is the
entry and B3 the exit,
1. B1 and B3 are control equivalent: Bx
dominates B3 and B3 postdominates Bi,
2. Bi dominates B2 but
B2 does not postdominate B1, and
3. B2 does not dominate B3 but B3 postdominates B2.
It is also possible for a pair of blocks along a path to share
neither a dominance nor postdominance relation.
2. Upward Code Motion
We now examine carefully what it means to move an operation up a
path. Suppose we wish to move an operation from block src up a
control-flow path to block dst. We assume that such a move does not
violate any data dependences and that it makes paths through dst and src
run faster. If dst dominates src, and src postdominates dst,
then the operation moved is executed once and only once, when it should.
If src does not
post dominate dst
Then there exists a path that passes through dst that does
not reach src. An extra operation would have been executed in this case.
This code motion is illegal unless the operation moved has no unwanted side
effects. If the moved operation executes "for free" (i.e., it uses
only resources that otherwise would be idle), then this move has no cost. It is
beneficial only if the control flow reaches src.
If dst does not dominate
src
Then there exists a
path that reaches src without first going through dst. We need to insert copies of the moved
operation along such paths. We know how
to achieve exactly that from our discussion of partial redundancy elimination
in Section 9.5- We place copies of the
operation along basic blocks that form a cut set separating the entry block
from src. At each place where the
operation
is inserted, the
following constraints must be satisfied:
1. The operands of
the operation must hold the same values as in the original,
2.
The result does
not overwrite a value that is still needed, and
3.
It itself is
not subsequently overwritten befpre reaching src.
These copies render the original instruction in src fully
redundant, and it thus can be eliminated.
We refer to the extra
copies of the operation as compensation code. As dis-cussed in Section
9.5, basic blocks can be inserted along critical edges to create places for
holding such copies. The compensation code can potentially make some paths run
slower. Thus, this code motion improves program execution only if the optimized
paths are executed more frequently than the nonopti-mized ones.
3. Downward Code Motion
Suppose we are interested in moving an operation from block src
down a control-flow path to block dst. We can reason about such code
motion in the same way as above.
If src does not dominate dst Then there exists a path that
reaches dst without first visiting
src. Again, an extra operation will be
executed in this case. Unfortunately, downward code motion is often applied to
writes, which have the side effects of overwriting old values. We can get
around this problem by replicating the basic blocks along the paths from src
to dst, and placing the operation only in the new copy of dst. Another
approach, if available, is to use predicated instructions. We guard the
operation moved with the predicate that guards the src block. Note that
the predicated instruction must be scheduled only in a block dominated by the
computation of the predicate, because the predicate would not be available
otherwise.
If dst does not post dominate
src
As in the discussion above, compensation code needs to be inserted
so that the operation moved is executed on all paths not visiting dst.
This transformation is again analogous to partial redundancy elimination,
except that the copies are placed below the src block in a cut set that
separates src from the exit.
Summary of
Upward and Downward
Code Motion
From this discussion, we see that there is a range of possible
global code mo-tions which vary in terms of benefit, cost, and implementation
complexity. Fig-ure 10.13 shows a summary of these various code motions; the
lines correspond to the following four cases:
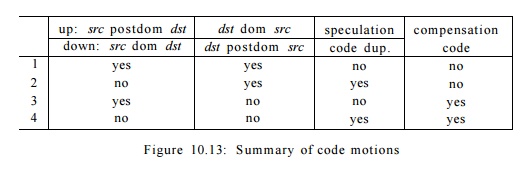
1. Moving instructions between
control-equivalent blocks is simplest and most cost effective. No extra
operations are ever executed and no com-pensation code is needed.
2.
Extra
operations may be executed if the source does not postdominate (dominate) the
destination in upward (downward) code motion. This code motion is beneficial if
the extra operations can be executed for free, and the path passing through the
source block is executed.
3.
Compensation
code is needed if the destination does not dominate (post-dominate) the source
in upward (downward) code motion. The paths with the compensation code may be
slowed down, so it is important that the optimized paths are more frequently
executed.
4.
The last case
combines the disadvantages of the second and third case: extra operations may
be executed and compensation code is needed.
4. Updating Data
Dependences
As illustrated by Example 10.10 below, dcode motion
can change the data-Thus dependence
relations between operations. updated
data dependences must be after each code movement.
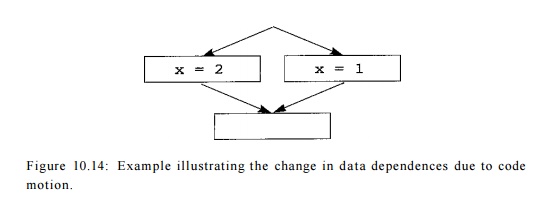
E x a m p l e 10 . 10 : For the flow graph shown
in Fig. 10.14, either assignment to x can be moved up to the top block,
since all the dependences in the original program are preserved with
this transformation. However, once we have moved one assignment up, we cannot
move the other. More specifically, we see that variable x is not live on
exit in the top block before the code motion, but it is live after the motion.
If a variable is live at a program point, then we cannot move speculative
definitions to the variable above that program point.
5. Global Scheduling Algorithms
We saw in the last section that code motion can benefit some paths
while hurting the performance of others. The good news is that instructions are
not all created equal. In fact, it is well established that over 90% of a
program's execution time is spent on less than 10% of the code. Thus, we should
aim to make the frequently executed paths run faster while possibly making the
less frequent paths run slower.
There are a number of techniques a compiler can use to estimate
execution frequencies. It is reasonable to assume that instructions in the
innermost loops are executed more often than code in outer loops, and that
branches that go backward are more likely to be taken than not taken. Also,
branch statements found to guard program exits or exception-handling routines
are unlikely to be taken. The best frequency estimates, however, come from
dynamic profiling. In this technique, programs are instrumented to record the
outcomes of conditional branches as they run. The programs are then run on
representative inputs to determine how they are likely to behave in general.
The results obtained from this technique have been found to be quite accurate.
Such information can be fed back to the compiler to use in its optimizations.
R e g i o n - B a s e
d S c h e d u l i n g
We now describe a straightforward global scheduler that supports
the two eas-iest forms of code motion:
1.
Moving
operations up to control-equivalent basic blocks, and
2.
Moving
operations speculatively up one branch to a dominating predeces-sor.
Recall from Section
9.7.1 that a region is a subset of a control-flow graph that can be reached
only through one entry block. We may represent any procedure as a hierarchy of
regions. The entire procedure constitutes the top-level region, nested in it
are subregions representing the natural loops in the function. We assume that
the control-flow graph is reducible.
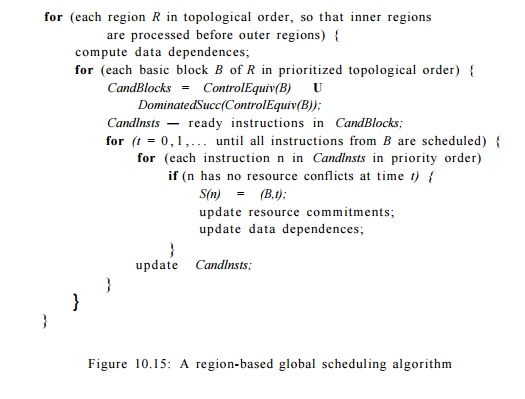
Algorithm 1 0 . 1 1 : Region-based scheduling.
INPUT : A control-flow graph and a machine-resource description.
OUTPUT : A schedule S
mapping each instruction to a basic block and a time slot.
METHOD
: Execute
the program in Fig. 10.15. Some shorthand terminology should be
apparent: ControlEquiv(B) is
the set of blocks that are control- equivalent to block B, and DominatedSucc applied to a set of blocks
is the set of blocks that are successors of at least one block in the set and
are dominated by all.
Code scheduling in
Algorithm 10.11 proceeds from the
innermost regions to the outermost. When scheduling a region, each nested
subregion is treated as a black box; instructions are not allowed to move in or
out of a subregion. They can, however, move around a subregion, provided their
data and control dependences are satisfied.
All control and
dependence edges flowing back to the header of the region are ignored, so the
resulting control-flow and data-dependence graphs are acyclic. The basic blocks
in each region are visited in topological order. This ordering guarantees that
a basic block is not scheduled until all the instructions it de-pends on have
been scheduled. Instructions to be scheduled in a basic block B are
drawn from all the blocks that are control-equivalent to B (including B),
as well as their immediate successors that are dominated by B.
A list-scheduling
algorithm is used to create the schedule for each basic block. The algorithm
keeps a list of candidate instructions, Candlnsts, which contains all
the instructions in the candidate blocks whose predecessors all have been
scheduled. It creates the schedule clock-by-clock. For each clock, it checks
each instruction from the Candlnsts in priority order and schedules it
in that clock if resources permit. Algorithm 10.11 then updates Candlnsts
and repeats the process, until all instructions from B are scheduled.
The priority order of
instructions in Candlnsts uses a priority function sim-ilar to that
discussed in Section 10.3. We make one important modification, however. We give
instructions from blocks that are control equivalent to B higher
priority than those from the successor blocks. The reason is that in-structions
in the latter category are only speculatively executed in block B.
Loop
Unrolling
In region-based
scheduling, the boundary of a loop iteration is a barrier to code motion.
Operations from one iteration cannot overlap with those from another. One
simple but highly effective technique to mitigate this problem is to unroll the
loop a small number of times before code scheduling. A for-loop such as
can be written as in
Fig. 10.16(b). Unrolling creates more instructions in the loop body, permitting
global scheduling algorithms to find more parallelism.

Neighborhood Compaction
Algorithm 10.11 only
supports the first two forms of code motion described in Section 10.4.1. Code
motions that require the introduction of compensation code can sometimes be
useful. One way to support such code motions is to follow the region-based scheduling
with a simple pass. In this pass, we can examine each pair of basic blocks that
are executed one after the other, and check if any operation can be moved up or down
between them to improve the execution time of those blocks. If such a pair is found, we check if the
instruction to be moved needs to be duplicated along other paths. The code
motion is made if it results in an expected net gain.
This simple extension
can be quite effective in improving the performance of loops. For instance, it
can move an operation at the beginning of one iteration to the end of the
preceding iteration, while also moving the operation from the first iteration
out of the loop. This optimization is particularly attractive for tight loops,
which are loops that execute only a few instructions per iteration. However,
the impact of this technique is limited by the fact that each code-motion
decision is made locally and independently.
6. Advanced Code Motion Techniques
If our target machine is statically scheduled and has plenty of
instruction-level parallelism, we may need a more aggressive algorithm. Here is
a high-level description of further extensions:
1.
To facilitate
the extensions below, we can add new basic blocks along control-flow edges
originating from blocks with more than one predecessor. These basic blocks will
be eliminated at the end of code scheduling if they are empty. A useful
heuristic is to move instructions out of a basic block that is nearly empty, so
that the block can be eliminated completely.
2.
In Algorithm
10.11, the code to be executed in each basic block is scheduled once and for
all as each block is visited. This simple approach suffices because the
algorithm can only move operations up to dominating blocks. To allow motions
that require the addition of compensation code, we take a slightly different
approach. When we visit block B, we only schedule instructions from B
and all its control-equivalent blocks. We first try to place these instructions
in predecessor blocks, which have already been visited and for which a partial
schedule already exists. We try to find a destination block that would lead to
an improvement on a frequently executed path and then place copies of the
instruction on other paths to guarantee correctness. If the instructions cannot
be moved up, they are scheduled in the current basic block as before.
3.
Implementing
downward code motion is harder in an algorithm that visits basic blocks in
topological order, since the target blocks have yet to be
scheduled. However, there are relatively fewer opportunities for
such code motion anyway. We move all operations that
(a)
can be moved,
and
(b)
cannot be
executed for free in their native block.
This simple strategy works well if the target machine is rich with
many unused hardware resources.
7. Interaction with Dynamic Schedulers
A dynamic scheduler has the advantage that it can create new
schedules ac-cording to the run-time conditions, without having to encode all
these possible schedules ahead of time. If a target machine has a dynamic
scheduler, the static scheduler's primary function is to ensure that
instructions with high latency are fetched early so that the dynamic scheduler
can issue them as early as possible.
Cache misses are a class of unpredictable events that can make a
big differ-ence to the performance of a program. If data-prefetch instructions
are avail-able, the static scheduler can help the dynamic scheduler
significantly by placing these prefetch instructions early enough that the data
will be in the cache by the time they are needed. If prefetch instructions are
not available, it is useful for a compiler to estimate which operations are
likely to miss and try to issue them early.
If dynamic scheduling is not available on the target machine, the
static scheduler must be conservative and separate every data-dependent pair of
op-erations by the minimum delay. If dynamic scheduling is available, however,
the compiler only needs to place the data-dependent operations in the correct
order to ensure program correctness. For best performance, the compiler should
as-sign long delays to dependences that are likely to occur and short ones to
those that are not likely.
Branch misprediction is an important cause of loss in performance.
Because of the long misprediction penalty, instructions on rarely executed
paths can still have a significant effect on the total execution time. Higher
priority should be given to such instructions to reduce the cost of
misprediction.
8. Exercises for Section 10.4
Assume a machine that
uses the delay model of Example 10.6 (loads take two clocks, all other
instructions take one clock). Also
assume that the machine can execute any two instructions at once. Find a shortest possible execution of this
fragment. Do not forget to consider which register is best used for each of the
copy steps. Also, remember to exploit the information given by register
descriptors as was described in Section 8.6, to avoid unnecessary loads and
stores.
Related Topics