Chapter: Civil : Principles of Solid Mechanics : Two Dimensional Solutions for Straight and Circular Beams
Polynomial Solutions and Straight Beams
Polynomial
Solutions and Straight Beams
A number of stress
fields in rectangular coordinates will be presented or asked for in problems in
later pages. In most cases, these results are obtained most easily by
solving in polar coordinates and transforming them to Cartesian form by MohrŌĆÖs
Circle. However for beams (long rectan-gular strips) polynomial stress
functions in Cartesian coordinates are pref-erable because boundary conditions
are easily expressed. It is also possible to compare the more exact elasticity
solutions thus generated directly to the standard strength-of-materials type
solutions,* which are expressed in powers of x and y. To get
ahead of ourselves, we will show that, away from concen-trated loads or support
reactions (which are a separate problem), the elasticity modifications of
elementary formulae are significant for design only for very short beams (where
the span and depth are comparable).
A polynomial of nth degree with
unknown coefficients can be written:
The constant a0 and first-order
terms give no stresses and can be omitted. The second-order terms give constant
stress components and the third-order terms, linear stress components
corresponding to the free fields of Chapter 5. Since the polynomial terms
through the third order automatically satisfy the biharmonic equation Ō▒»4F = 0, the unknown coefficients can be adjusted at will to satisfy the boundary
conditions.* However, for polynomials of higher than third degree, there must
be relationships between the coefficients if geo-metric compatibility,
expressed by Equation (6.3), is to be maintained. For example, if all the
fourth-order terms were included, then Equation (6.3) would be satisfied only
if:
a4 + 2c4 + e4 = 0
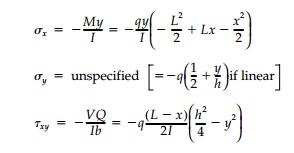
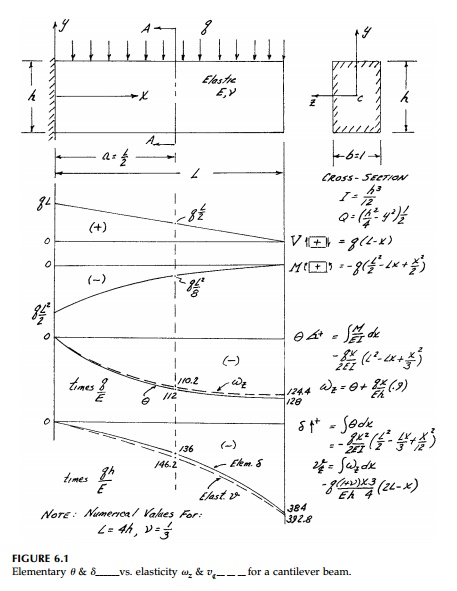
Consider, for example, the case of a cantilever beam
with a uniform load as shown in Figure 6.1. Using the strength-of-materials
approach based on plane sections, gives the elementary formulas:
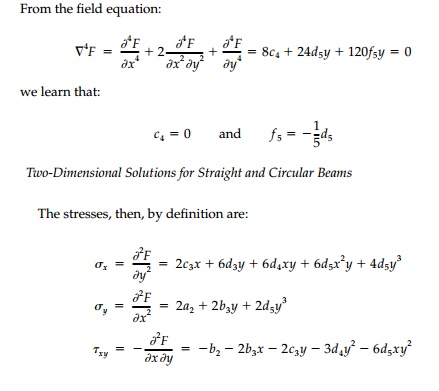
Let us now develop an elasticity solution using a
polynomial stress func-tion and the semi-inverse approach of rational mechanics
in choosing appro-priate terms. There are two stress boundary conditions on
each of the three exposed faces and two overall equilibrium conditions at x
= 0. We will also get an equation relating coefficients from Equation (6.3). Thus
we should apparently assume a polynomial with at least nine terms. From our
physical understanding, we know we should not include terms with even powers of
y greater than two since Žāy
changes
sign top and bottom. Also, since Žāy
should
not vary with x, we should eliminate all xn >
x2. Therefore, starting with the second-order terms, assume
the stress function.
F =
a2 x2
+
b2 xy + b3 x2
y +
c3 xy2
+
d3 y3 + c4
x2 y2
+
d4 xy3
+
d5 x2
y3 +
f 5 y5 (6.5)

Looking at Žāx and Žäxy, it is clear that the c3 term is unrealistic. There should not be a large normal stress at the neutral axis (y = 0) or a linear shear term that changes sign. Therefore let c3 = 0
Applying the boundary conditions at the top and
bottom:
While it looks like we are losing a boundary
condition, the x = any require-ment on
(b) gives two
requirements:
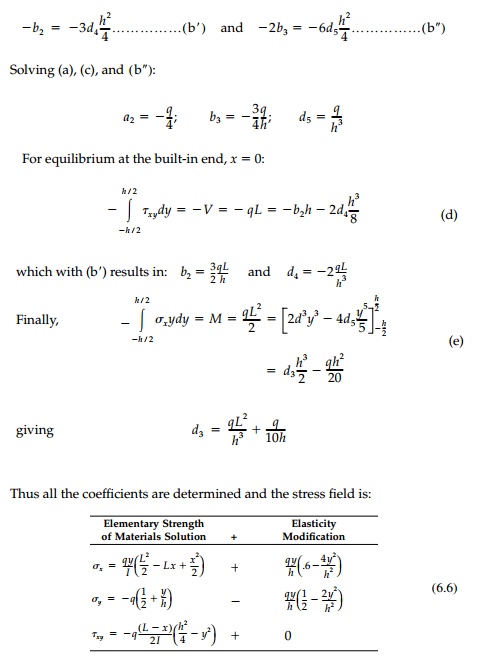
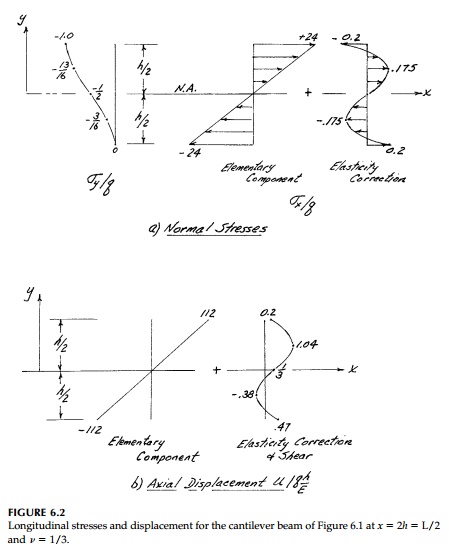
The shear stress
distribution is exactly that given by the elementary for-mula. The ŌĆ£elasticity
correctionŌĆØ to Žāx
is plotted in Figure 6.2a, as is the dis-tribution of Žāy
, which is not considered at all in the elementary theory. Both are independent
of x so that at x = L the boundary
condition, that the end of the beam be free of normal stresses, is not
satisfied.* However, these stresses are very small and the net resultant ╩āŽāx
dA is in fact zero so that only very close to the end of the beam will
this elasticity correction be inexact.
Note that Žāy
and the elasticity correction to Žāx
are plotted in Figure 6.2a at greatly exaggerated scale so they are
recognizable compared to the basic ele-mentary portion of Žāx.
In practice they are of no engineering significance. At x=0,
where Žāx
will
be maximum when y =+ - h/2
Even for a very short beam, say L =
2h, the elasticity contribution is less than 2%. Other uncertainties
introduced by the geometric conditions of a real built-in support at x =
0 (not rigid and not plane stress) would be more important.
The deflection of the beam can be determined by
integrating the relative displacements given by Equation (4.18). From the
stressŌĆ'strain relation-ships:
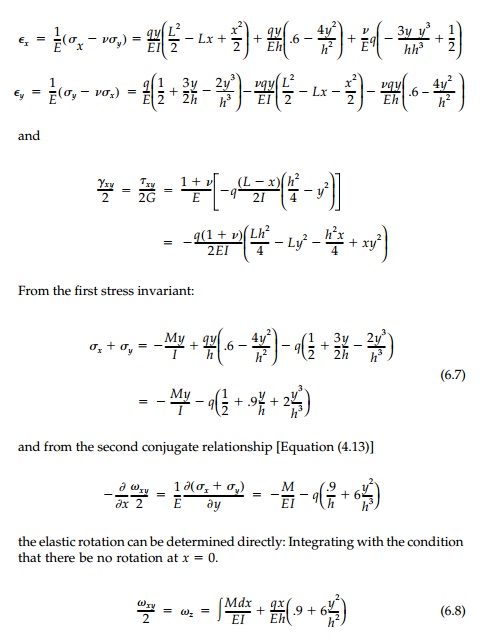
The first term, being the integral of the moment
diagram, is the same as the slope, ╬Ė, given by elementary theory and the
second, the elasticity contribu-tion, is due primarily to Žāy
now being included. Substituting the expression for the Moment Diagram:

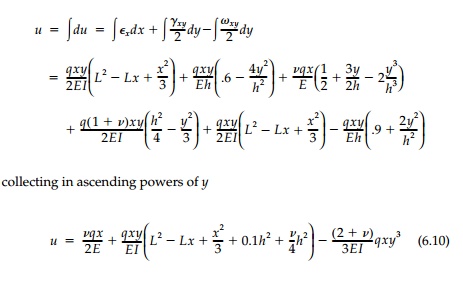
Since this is plane stress, there will be elastic
rotation Žēx
and anticlastic cur-vature, but we will concern ourselves with the displacement
of the centroidal plane of symmetry z = 0.
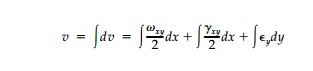
The displacements are found by integrating Equation
(4.17) directly with the support condition that at x = 0 and y = any, u =
v = 0.
The first term not in
the elementary theory is the Poisson-ratio effect due to (Žāy)avg
= - q/2
giving (Ex)avg
= + Žģq/2E which integrates
to a linear function of x. The second term, linear in y, conforms
with the assumption of plane sec-tions with the last two h2
components being a contribution from elasticity. The final y3
term warps the cross-section and is a result of Ey,
the elasticity correc-tion to Ex
and the shear strain ╬│xy
, all of which are not included in the elemen-tary solution for displacements.
The warping of an arbitrary cross-section at x =
a =
2h
for a short beam L = 4h
is shown in Figure 6.2b. It is clear that from an engineering
standpoint the elementary formula is perfectly adequate.
Following the same procedure to find the vertical
displacement
where the third term does not contribute directly
since v must equal zero at x = 0.
Therefore:
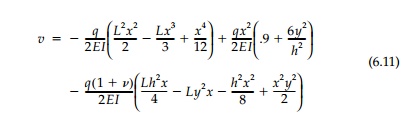
The first term is the integral of the slope diagram
as in the elementary the-ory, and the second and third terms are the
contributions from the elasticity correction and the shear, respectively. The
deflection of the centroidal axis at y =
0 is therefore:

The rotation Žēz and vertical deflection v of the centroidal axis from elasticity are compared to the values for ╬Ė and Žé from elementary theory in Figure 6.1. As was true for stresses and longitudinal displacements, the difference between them must be exaggerated in plotting to be recognizable.
This conclusion that
elementary analysis for straight beams is very accurate will be true for all
other cases of distributed loading. Therefore, while most texts include a few
more examples, here they are left to the chapter prob-lems. Some further
remarks concerning straight beams are included in the final section.
Example 6.1
A thin elastic square plate of 2c on a side
is free of body forces and is subjected to a loading around its four edges such
that the stress function is found to be
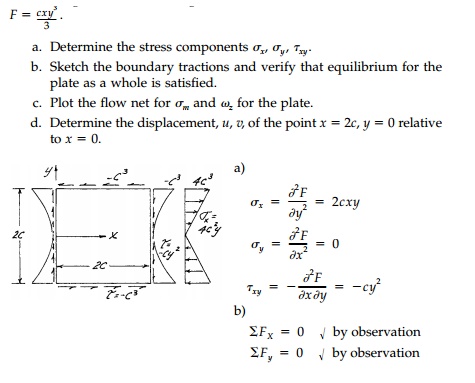
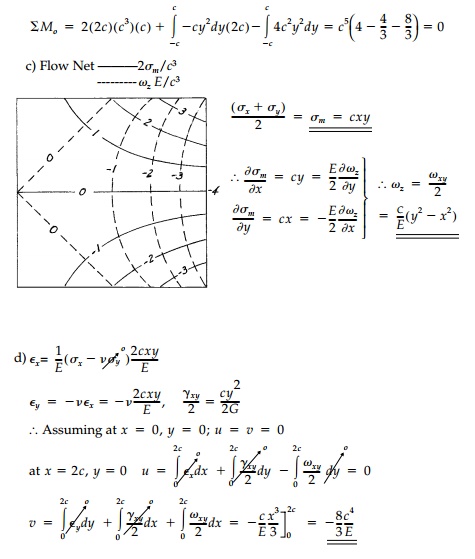
Related Topics