Chapter: Multicore Application Programming For Windows, Linux, and Oracle Solaris : Identifying Opportunities for Parallelism
Multiple Loosely Coupled Tasks
Multiple
Loosely Coupled Tasks
A slight
variation on the theme of multiple independent tasks would be where the tasks
are different, but they work together to form a single application. Some applications do need to have multiple independent
tasks running simultaneously, with each task generally independent and often
different from the other running tasks. However, the reason this is an
application rather than just a collection of tasks is that there is some
element of com-munication within the system. The communication might be from
the tasks to a central task controller, or the tasks might report some status
back to a status monitor.
In this
instance, the tasks themselves are largely independent. They may occasionally
communicate, but that communication is likely to be asynchronous or perhaps
limited to exceptional situations.
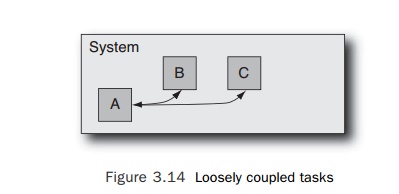
Figure
3.14 shows a single system running three tasks. Task A is a control or
supervi-sor, and tasks B and C are reporting status to task A.
The
performance of the application depends on the activity of these individual
tasks. If the CPU-consuming part of the “application” has been split off into a
separate task, then the rest of the components may become more responsive. For
an example of this improved responsiveness, assume that a single-threaded
application is responsible for receiving and forwarding packets across the
network and for maintaining a log of packet activity on disk. This could be
split into two loosely coupled tasks—one receives and for-wards the packets
while the other is responsible for maintaining the log. With the origi-nal
code, there might be a delay in processing an incoming packet if the
application is busy writing status to the log. If the application is split into
separate tasks, the packet can be received and forwarded immediately, and the
log writer will record this event at a convenient point in the future.
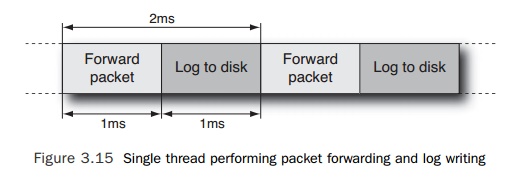
The
performance gain arises in this case because we have shared the work between
two threads. The packet-forwarding task only has to process packets and does
not get delayed by disk activity. The disk-writing task does not get stalled
reading or writing packets. If we assume that it takes 1ms to read and forward
the packet and another 1ms to write status to disk, then with the original
code, we can process a new packet every 2ms (this represents a rate of 5,000
packets per second). Figure 3.15 shows this situation.
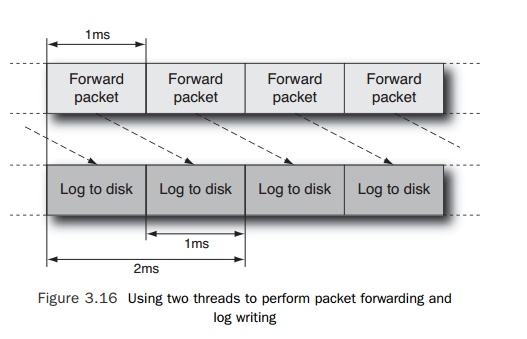
If we
split these into separate tasks, then we can handle a packet every 1ms, so
throughput will have doubled. It will also improve the responsiveness because
we will handle each packet within 1ms of arrival, rather than within 2ms.
However, it still takes 2ms for the handling of each packet to complete, so the
throughput of the system has doubled, but the response time has remained the
same. Figure 3.16 shows this situation.
Related Topics