Chapter: Multicore Application Programming For Windows, Linux, and Oracle Solaris : Identifying Opportunities for Parallelism
How Synchronization Costs Reduce Scaling
Unfortunately, there are overhead costs associated with parallelizing
applications. These are associated with making the code run in parallel, with
managing all the threads, and with the communication between threads. You can
find a more detailed discussion in Chapter 9, “Scaling on Multicore Systems.”
In the model discussed here, as with Amdahl’s law, we will ignore any
costs intro-duced by the implementation of parallelization in the application
and focus entirely on the costs of synchronization between the multiple
threads. When there are multiple threads cooperating to solve a problem, there
is a communication cost between all the threads. The communication might be the
command for all the threads to start, or it might represent each thread
notifying the main thread that it has completed its work.
We can denote this synchronization cost as some function F(N), since it
will increase as the number of threads increases. In the best case, F(N) would
be a constant, indicating that the cost of synchronization does not change as
the number of threads increases. In the worst case, it could be linear or even
exponential with the number threads. A fair estimate for the cost might be that
it is proportional to the logarithm of the number of threads (F(N)=K*ln(N));
this is relatively easy to argue for since the logarithm represents the cost of
communication if those threads communicated using a balanced tree. Taking this
approximation, then the cost of scaling to N threads would be as follows:
The value of K would be some constant that represents the communication
latency between two threads together with the number of times a synchronization
point is encountered (assuming that the number of synchronization points for a
particular appli-cation and workload is a constant). K will be proportional to
memory latency for those systems that communicate through memory, or perhaps
cache latency if all the commu-nicating threads share a common level of cache.
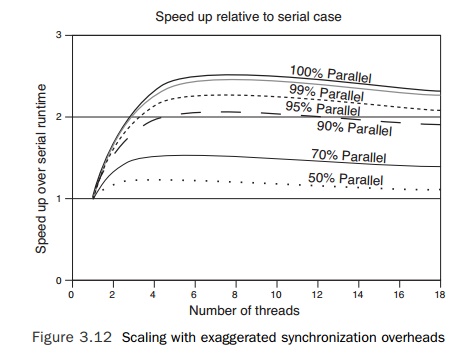
Figure 3.12 shows the curves resulting from an unrealistically large value for
the constant K, demonstrating that at some thread count the performance gain
over the serial case will start decreasing because of the syn-chronization
costs.
It is relatively straightforward to calculate the point at which this
will happen:
Solving this for N indicates that the minimal value for the runtime
occurs when
This tells us that the number of threads that a code can scale to is
proportional to the ratio of the amount of work that can be parallelized and
the cost of synchronization. So, the scaling of the application can be
increased either by making more of the code run in parallel (increasing the
value of P) or by reducing the synchronization costs (reducing the value of K).
Alternatively, if the number of threads is held constant, then reducing the
synchronization cost (making K smaller) will enable smaller sections of code to
be made parallel (P can also be made smaller).
What makes this interesting is that a multicore processor will often
have threads shar-ing data through a shared level of cache. The shared level of
cache will have lower latency than if the two threads had to communicate
through memory. Synchronization costs are usually proportional to the latency
of the memory through which the threads communicate, so communication through a
shared level of cache will result in much lower synchronization costs. This
means that multicore processors have the opportunity to be used for either
parallelizing regions of code where the synchronization costs were previously
prohibitive or, alternatively, scaling the existing code to higher thread
counts than were previously possible.
So far, this chapter has discussed the expectations that a developer
should have when scaling their code to multiple threads. However, a bigger
issue is how to identify work that can be completed in parallel, as well as the
patterns to use to perform this work. The next section discusses common
parallelization patterns and how to identify when to use them.
Related Topics