Chapter: Fundamentals of Database Systems : File Structures, Indexing, and Hashing : Disk Storage, Basic File Structures, and Hashing
Hashing Techniques That Allow Dynamic File Expansion
Hashing Techniques That
Allow Dynamic File Expansion
A major
drawback of the static hashing scheme
just discussed is that the hash address space is fixed. Hence, it is difficult
to expand or shrink the file dynamically. The schemes described in this section
attempt to remedy this situation. The first scheme—extendible hashing—stores an
access structure in addition to the file, and hence is somewhat similar to
indexing (see Chapter 18). The main difference is that the access structure is
based on the values that result after application of the hash function to the search
field. In indexing, the access structure is based on the values of the search
field itself. The second technique, called linear hashing, does not require
additional access structures. Another scheme, called dynamic hashing, uses an access structure based on binary tree data
structures..
These
hashing schemes take advantage of the fact that the result of applying a
hashing function is a nonnegative integer and hence can be represented as a
binary number. The access structure is built on the binary representation of the hashing function result, which is a
string of bits. We call this the hash value of a record. Records are
distributed among buckets based on the values of the leading bits in their hash values.
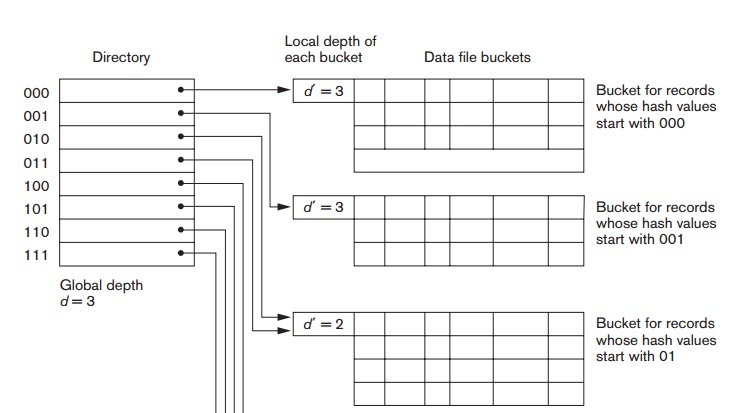
Extendible Hashing. In
extendible hashing, a type of directory—an array of 2d bucket
addresses—is maintained, where d is
called the global depth of the
directory. The integer value corresponding to the first (high-order) d bits of a hash value is used as an
index to the array to determine a directory entry, and the address in that
entry determines the bucket in which the corresponding records are stored.
However, there does not have to be a distinct bucket for each of the 2d directory locations.
Several directory locations with the same first d bits for their hash values may contain the same bucket address if
all the records that hash to these locations fit in a single bucket. A local depth d —stored with each bucket—specifies the number of bits on which the
bucket contents are based. Figure 17.11 shows a directory with global depth d = 3.
The value
of d can be increased or decreased by
one at a time, thus doubling or halving the number of entries in the directory
array. Doubling is needed if a bucket, whose local depth d is equal to the global depth d,
overflows. Halving occurs if d > d for all the buckets after some
deletions occur. Most record retrievals require two block accesses—one to the directory and the other to the bucket.
To
illustrate bucket splitting, suppose that a new inserted record causes overflow
in the bucket whose hash values start with 01—the third bucket in Figure 17.11.
The records will be distributed between two buckets: the first contains all
records whose hash values start with 010, and the second all those whose hash
values start with 011. Now the two directory locations for 010 and 011 point to
the two new distinct buckets. Before the split, they pointed to the same
bucket. The local depth d of the two
new buckets is 3, which is one more than the local depth of the old bucket.
If a
bucket that overflows and is split used to have a local depth d equal to the global depth d of the directory, then the size of the
directory must now be doubled so that we can use an extra bit to distinguish
the two new buckets. For example, if the bucket for records whose hash values
start with 111 in Figure 17.11 overflows, the two new buckets need a directory
with global depth d = 4, because the
two buckets are now labeled 1110 and 1111, and hence their local depths are
both 4. The directory size is hence doubled, and each of the other original
locations in the directory
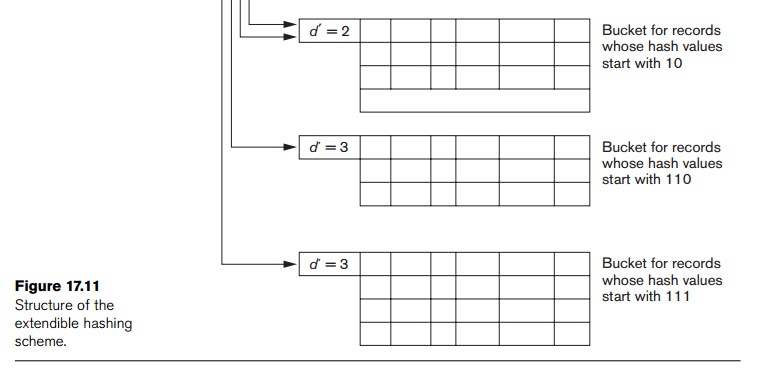
is also
split into two locations, both of which have the same pointer value as did the
original location.
The main advantage of extendible hashing that makes it attractive is that the performance of the file does not degrade as the file grows, as opposed to static external hashing where collisions increase and the corresponding chaining effectively increases the average number of accesses per key. Additionally, no space is allocated in extendible hashing for future growth, but additional buckets can be allocated dynamically as needed. The space overhead for the directory table is negligible. The maximum directory size is 2k, where k is the number of bits in the hash value. Another advantage is that splitting causes minor reorganization in most cases, since only the records in one bucket are redistributed to the two new buckets. The only time reorganization is more expensive is when the directory has to be doubled (or halved). A disadvantage is that the directory must be searched before accessing the buckets themselves, resulting in two block accesses instead of one in static hashing. This performance penalty is considered minor and thus the scheme is considered quite desirable for dynamic files.
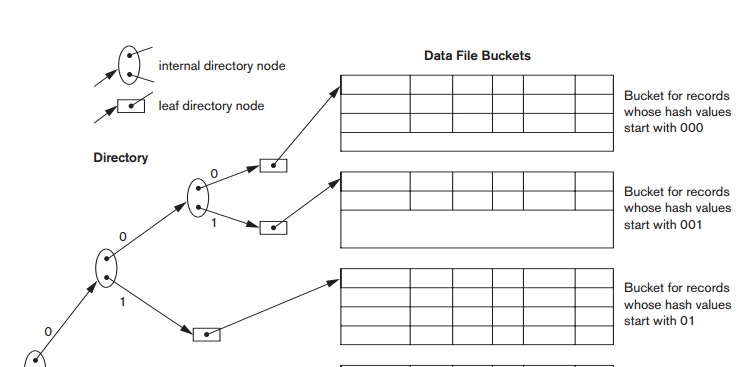
Dynamic Hashing. A precursor to extendible hashing
was dynamic hashing, in which the
addresses of the buckets were either the n
high-order bits or n − 1 high-order bits, depending on
the total number of keys belonging to the respective bucket. The eventual
storage of records in buckets for dynamic hashing is somewhat similar to
extendible hashing. The major difference is in the organization of the
directory. Whereas extendible hashing uses the notion of global depth
(high-order d bits) for the flat
directory and then combines adjacent collapsible buckets into a bucket of local
depth d − 1, dynamic hashing maintains a
tree-structured directory with two types of nodes:
Internal nodes that have two pointers—the left
pointer corresponding to the 0 bit (in the hashed address) and a right pointer
corresponding to the 1 bit.
Leaf nodes—these hold a pointer to the actual
bucket with records.
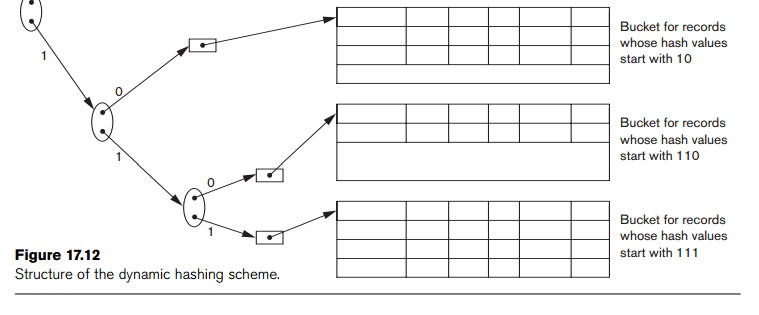
An
example of the dynamic hashing appears in Figure 17.12. Four buckets are shown
(“000”, “001”, “110”, and “111”) with high-order 3-bit addresses
(corresponding to the global depth of 3), and two buckets (“01” and “10” ) are
shown with high-order 2-bit addresses (corresponding to the local depth of 2).
The latter two are the result of collapsing the “010” and “011” into “01” and
collapsing “100” and “101” into “10”. Note that the directory nodes are used
implicitly to determine the “global” and “local” depths of buckets in dynamic
hashing. The search for a record given the hashed address involves traversing
the directory tree, which leads to the bucket holding that record. It is left
to the reader to develop algorithms for insertion, deletion, and searching of
records for the dynamic hashing scheme.
Linear Hashing. The idea behind linear hashing is
to allow a hash file to expand and
shrink its number of buckets dynamically without
needing a directory. Suppose that the file starts with M buckets numbered 0, 1, ..., M
− 1 and uses the mod hash function
h(K)
= K mod M; this hash function is called the initial hash function hi.
Overflow because of collisions is still needed and can be handled by
maintaining individual overflow chains for each bucket. However, when a
collision leads to an overflow record in any
file bucket, the first bucket in the
file—bucket 0—is split into two buckets: the original bucket 0 and a new bucket
M at the end of the file. The records
originally in bucket 0 are distributed between the two buckets based on a
different hashing function hi+1(K) = K
mod 2M. A key property of the two
hash
functions
hi and hi+1 is that any
records that hashed to bucket 0 based on hi
will hash to either bucket 0 or bucket M
based on hi+1;
this is necessary for linear hashing to work.
As
further collisions lead to overflow records, additional buckets are split in
the linear order 1, 2, 3, .... If
enough overflows occur, all the original file buckets 0, 1, ..., M − 1 will have been split, so the
file now has 2M instead of M buckets, and all buckets use the
hash function hi+1.
Hence, the records in overflow are eventually redistributed into regular
buckets, using the function hi+1
via a delayed split of their buckets.
There is no directory; only a value n—which
is initially set to 0 and is incremented by 1 whenever a split occurs—is
needed to determine which buckets have been split. To retrieve a record with
hash key value K, first apply the
function hi to K; if hi(K) < n, then apply the function hi+1 on K because the bucket is already split.
Initially, n = 0, indicating that the
function hi applies to all
buckets; n grows linearly as buckets
are split.
When n = M
after being incremented, this signifies that all the original buckets have been
split and the hash function hi+1
applies to all records in the file. At this point, n is reset to 0 (zero), and any new collisions that cause overflow
lead to the use of a new hashing function hi+2(K) = K
mod 4M. In general, a sequence of
hashing func-tions hi+j(K) = K mod (2jM) is used, where j = 0, 1, 2, ...; a new hashing function
hi+j+1 is needed whenever all the buckets 0, 1, ..., (2jM) − 1 have been split and n is
reset to 0. The search for a record with hash key value K is given by Algorithm 17.3.
Splitting can be controlled by monitoring the file load factor instead of by splitting whenever an overflow occurs. In general, the file load factor l can be defined as l = r/(bfr * N), where r is the current number of file records, bfr is the maximum number of records that can fit in a bucket, and N is the current number of file buckets. Buckets that have been split can also be recombined if the load factor of the file falls below a certain threshold. Blocks are combined linearly, and N is decremented appropriately. The file load can be used to trigger both splits and combinations; in this manner the file load can be kept within a desired range. Splits can be triggered when the load exceeds a certain threshold—say, 0.9—and combinations can be triggered when the load falls below another threshold—say, 0.7. The main advantages of linear hashing are that it maintains the load factor fairly constantly while the file grows and shrinks, and it does not require a directory.
Algorithm 17.3. The Search Procedure for Linear
Hashing
if n = 0
then m ← hj (K) (* m is the hash value
of record with hash key K *) else begin
m ← hj (K);
if m < n then m ← hj+1 (K)
end;
search
the bucket whose hash value is m (and
its overflow, if any);
Related Topics