Chapter: Programming and Data structures : Graphs
DijkstraŌĆÖs Algorithm
DIJKSTRAŌĆÖS
ALGORITHM:
Unweighted shortest Path
In
unweighted shortest path, all the edges are assigned to 1.
Required Information
i.
known ŌĆō Specifies
whether the vertex is processed or not. It is set to 1 after it is processed, otherwise 0. Initially all
vertices are unknown, so all entries marked as 0.
ii.
dv ŌĆō it
specifies distance form source to vertex. Initially all vertices are
unreachable except for S whose path
length is zero.
iii.
pv ŌĆō It is
book keeping variable, which allow us to print te actual path. i.e., the vertex which makes the changes in dv.
Procedure to find the unweighted shortest path
i.
Assign the source node as S and Enqueue S.
ii.
Dequeue the vertex S from queue and assign the
value of that vertex to be known and then find its adjacency vertices.
iii.
If the distance of the adjacent vertices is equal
to infinity then change the distance of that vertex as the distance of its
source vertex. Increment by 1 and enqueue the vertex.
iv.
Repeat step ii until the queue becomes empty.
Routine for unweighted shortest path
void
unweighted( Table T )
{
Queue Q;
Vertex v, w;
Q =
CreateQueue( NumVertex );
MakeEmpty(
Q );
Enqueue(
S, Q ); while( !IsEmpty( Q ) )
{
v =
Dequeue( Q );
T[v].known
= True;
for each
w adjacent to v
if(
T[w].Dist = = INFINITY )
{
T[w].Dist
= T[v].Dist + 1;
T[w].path
= v;
Enqueue(
w, Q );
}}
DisposeQueue(
Q ); /* free the memory */
}
Example
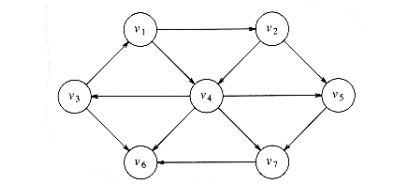
i.
v3 is taken as source node and its path length is
initialized to 0. v3 is inserted into Q.

ii.
v3 find its adjacent node whose path length is 1.
v1, v6 are adjacent nodes to v3 and inserted in to queue.

iii. Find the adjacent node for v1. v2 and v4 are adjacent node for v1, v2 and v4 inserted into the queue.
iv.
No adjacent vertices for v6. No change in path
value for all vertices.
v. Find the adjacent vertices for v2. v4 and v5 are adjacent nodes to v2 and inserted into queue.
vi.
Find the adjacent vertices for v4. v5, v6 and v7
are adjacent vertices. Minimum path length for v7 is 3. v7 is inserted into
queue.
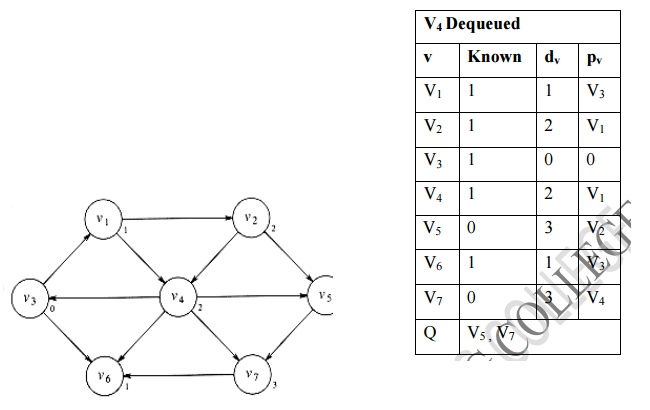
vii. An adjacent vertex for v5 is v7. Already found the minimum path length from v3 to v7 is 3. So no change in dv and pv.
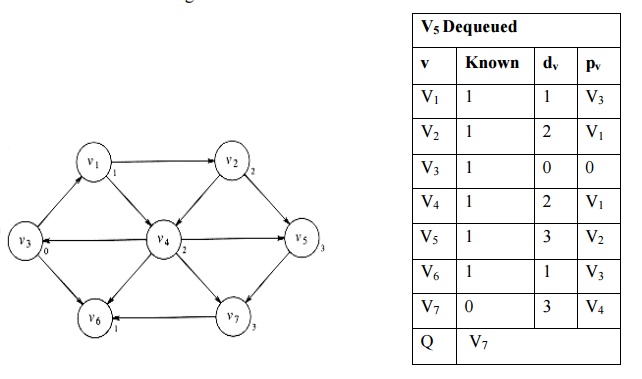
viii.
An adjacent vertex for v7 is v6. Already found the
minimum path length from v3 to v6 is 1. So no change in dv and pv.
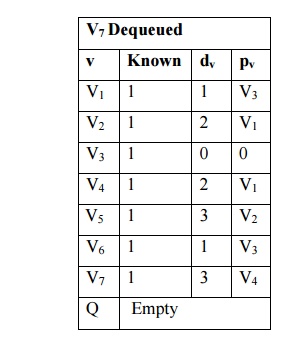
Algorithm Analysis
Running
time is O(|E| + |V|)
Weighted Graph
The
general method to solve the single source shortest path problem is known as
DijkstraŌƤs
algorithm. It applied to weighted graph.
Procedure
├ś It uses
greedy technique.
├ś It
proceeds in stages.
├ś It
selects a vertex v, which has the smallest dv among all the unknown
vertices and declares the shortest path from s to v is known.
├ś The remainder
consists of updating the value of dw.
├ś We
should dw = dv + Cv,
w, if the new value for dw would an improvement.
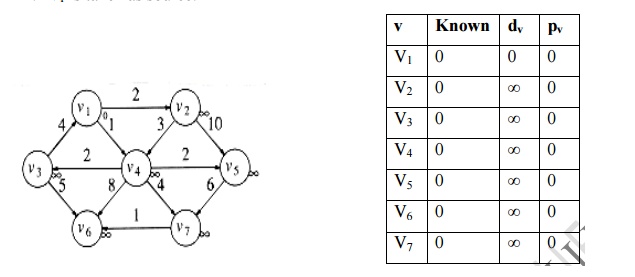
Example: Find the shortest path for the following
graph.
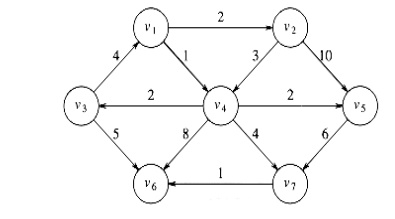
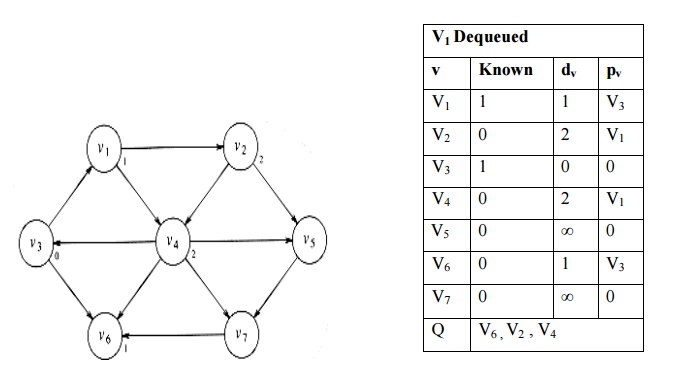
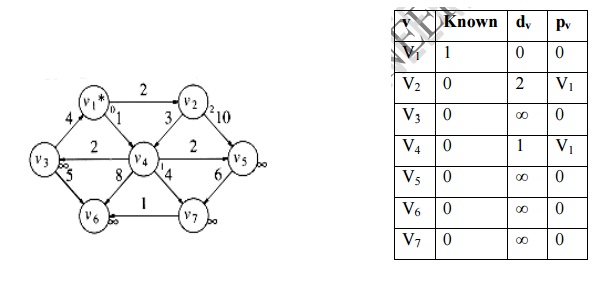
1. v1 is taken as source.
2. Now v1 is known vertex, marked as 1. Its adjacent vertices are v2, v4, pv and dv values are updated
T[v2]. dist = Min (T[v2].dist, T[v1].dist + Cv1, v2) = Min (╬▒ , 0+2) = 2
T[v4]. dist = Min (T[v4].dist, T[v1].dist + Cv1, v4) = Min (╬▒ , 0+1) = 1
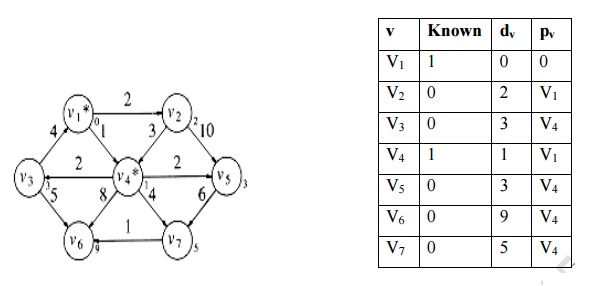
3. Select the vertex with minimum distance away v2 and v4
. v4 is marked as known vertex. Its adjacent vertices are v3,
v5, v6 and v7 .
T[v3].
dist = Min (T[v3].dist, T[v4].dist + Cv4, v3)
= Min (╬▒ , 1+2) = 3
T[v5].
dist = Min (T[v5].dist, T[v4].dist + Cv4, v5)
= Min (╬▒ , 1+2) = 3
T[v6].
dist = Min (T[v6].dist, T[v4].dist + Cv4, v6)
= Min (╬▒ , 1+8) = 9
T[v7].
dist = Min (T[v7].dist, T[v4].dist + Cv4, v7)
= Min (╬▒ , 1+4) = 5
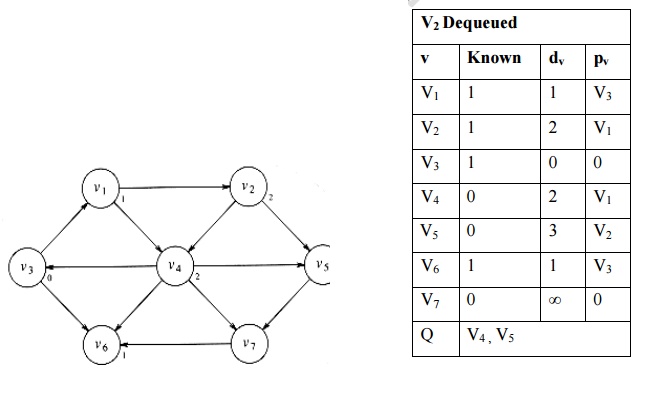
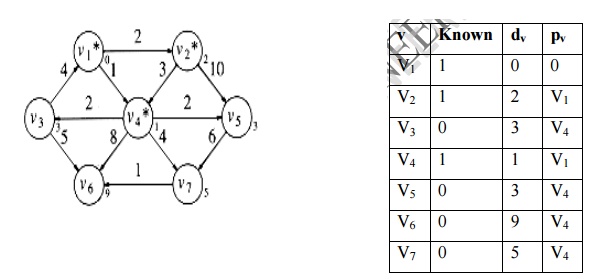
4. Select the vertex which is shortest distance from source v1. v2 is smallest one. v2 is marked as known vertex. Its adjacent vertices are v4 ad v5. The distance from v1 to v4 and v5 through v2 is more comparing with previous value of dv. No change in dv and pv value.
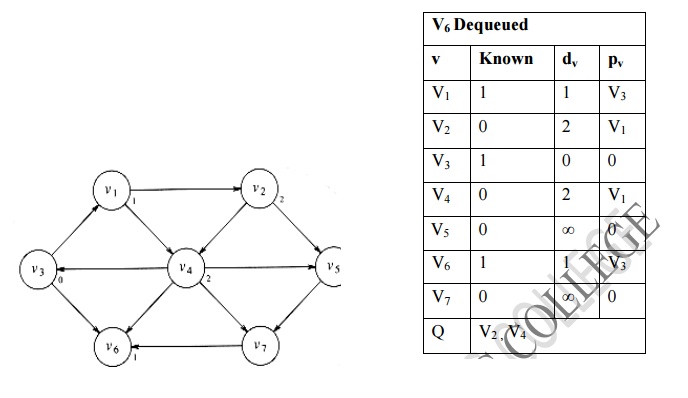
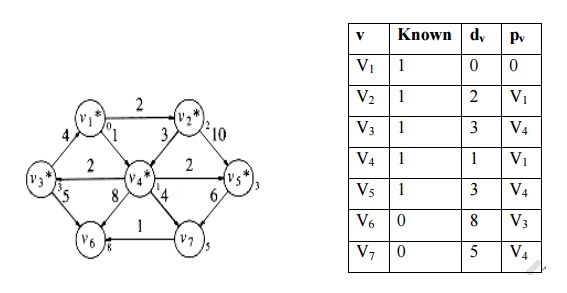
5. Select
tht smallest vertex from source. v3 and v5 are smallest
one. Adjacent vertices for v3 is v1 and v6. v1
is source there is no change in dv and pv
T[v6].
dist = Min (T[v6].dist, T[v3].dist + Cv3, v6)
= Min (9 , 3+5) = 8
dv
and pv values are updated. Adjacent vertices for v5 is v7.
No change in dv and pv value.
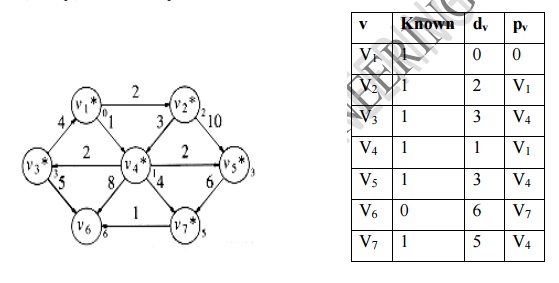
6. Next smallest vertex v7. Its adjacent
vertex is v6. T[v6]. dist = Min (T[v6].dist, T[v7].dist
+ Cv7, v6) = Min (8 , 5+1) = 6
dv
and pv values are updated.
7. The
last vertex v6 is declared as known. No adjacent vertices for v6.
No updation in the table.
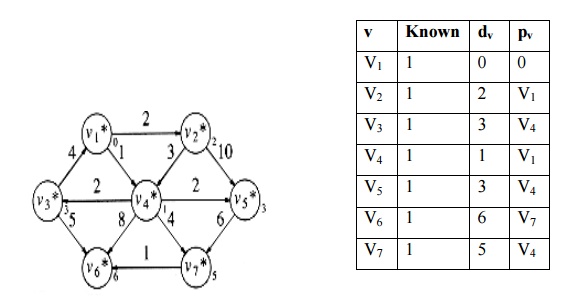
The shortest distance from source v1 to
all vertices. v1 -> v2 = 2
v1
-> v3 = 3 v1 -> v4 = 1 v1
-> v5 = 3 v1 -> v6 = 6 v1
-> v7 = 5
Algorithm Analysis
Time
complexity of this algorithm
O(|E| +
|V|2 ) = O(|V|2 )
Declarations for DijkstraŌĆÖs algorithm
typedef
int Vertex; struct TableEntry
{
List header; /* Adjacency
List*/
int
known;
DistType
Dist;
Vertex
Path
};
/*
Vertices are numbered from 0*/ #define NotAVertex (-1)
typedef
struct TableEntry Table[NumVertex];
Table Initialization routine
void
InitTable(Vertex Start, Graph G, Table T)
{
int i;
ReadGraph(G,T);
for (i=0;
i<NumVertex; i++)
{
T[i].known
= False;
T[i].
Dist = Infinity;
T[i].
Path = NotAVertex;
}
T[Start].
Dist = 0;
}
Routine to print the actual shortest path
void
Printpath(Vertex V, Table T)
{
if(T[V].
Path != NotAVertex)
{
PrintPath(T[V].
Path, T); printf(ŌĆ£toŌĆØ);
}
printf(ŌĆ£%vŌĆØ,
V);
/* %v is
pseudocode*/
}
Pseudocode for DijkstraŌĆÖs algorithm
void
Dijkstra(Table T)
{
Vertex v,
w; for( ; ;)
{
v =
smallest unknown distance vertex;
if( v = =
NotAVertex)
break;
T[v]. kown = True;
for each w adjacent to v if(!T[w].known)
if(T[v].Dist
+ Cvw < T[w]. Dist)
{
/* update
w*/
Decrease(T[w].
Dist to T[v].Dist + Cvw);
T[w].
path = v;
}
}
}
Related Topics