Chapter: Mechanical : Strength of Materials : Deflection of Beams
Deflection of Beams
DEFLECTION OF BEAMS
Elastic curve of neutral axis
Assuming that the
I-beam is symmetric, the neutral axis will be situated at the midsection of the
beam. The neutral axis is defined as the point in a beam where there is neither
tension nor compression forces. So if the beam is loaded uniformly from above,
any point above the neutral axis will be in compression, whereas any point
below it will be in tension
.
However, if the beam is
NOT symmetric, then you will have to use the following methodology to calculate
the position of the neutral axis. .
1. Calculate the total
cross-sectional area of the beam (we shall call this A). Let x denote the
position of the neutral axis from the topmost edge of the top flange of the
beam . .
2. Divide the I-beam
into rectangles and find the area of these rectangles (we shall denote these
areas as A1, A2, and A3 for the top flange, web and bottom flange
respectively). Additionally, find the distance from the edge of the top flange
to the midsection of these 3 rectangles (these distances will be denoted as x1,
x2 and x3) .
.
3. Now, to find the position of the neutral axis,
the following general formula must be used:
A*x= A1*x1 +
A2*x2 + A3*x3
We know all the
variables in the above formula, except for x (the position of the neutral axis
from the top edge of the top flange). So it is just a case of rearranging the
formula to find x.
Evaluation of beam deflection and slope
Beam deflection
Static beam equation
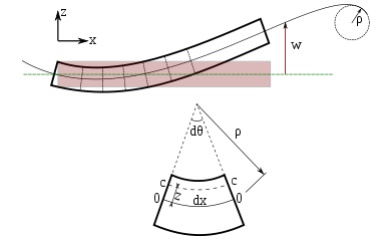
Bending of an
Euler-Bernoulli beam. Each cross-section of the beam is at 90 degrees to the
neutral axis.
The Euler-Bernoulli
equation describes the relationship between the beam's deflection
and the applied load
The curve w(x)
describes the deflection w of the beam at some position x (recall
that the beam is modeled as a one-dimensional object). q is a
distributed load, in other words a force per unit length (analogous to pressure
being a force per area); it may be a function of x, w, or other
variables.
Note that E is
the elastic modulus
and that I is the second moment
of area. I must be calculated with
respect to the centroidal axis perpendicular to the applied loading. For an
Euler-Bernoulli beam not under any axial loading this axis is called the neutral axis.
Often, w = w(x),
q = q(x), and EI
is a constant, so that:
This equation,
describing the deflection of a uniform, static beam, is used widely in
engineering practice. Tabulated expressions for the deflection wfor
common beam configurations can be found in engineering handbooks. For more
complicated situations the deflection can be determined by solving the
Euler-Bernoulli equation using techniques such as the "slope
deflection method", "moment distribution method", "moment
area method, "conjugate beam method", "the
principle of virtual work", "direct integration",
"Castigliano's method",
"Macaulay's method" or the "direct
stiffness method".
Successive derivatives of w have important
meanings:
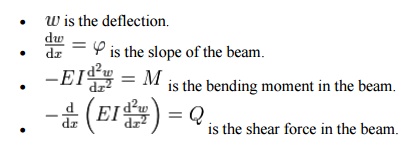
The stresses in a beam can be calculated from the
above expressions after the deflection due to a given load has been determined.
A number of different
sign conventions can be found in the literature on the bending of beams and
care should be taken to maintain consistency. In
this article, the sign convention has been chosen so the coordinate system is
right handed. Forces acting in the positive x and z directions
are assumed positive. The sign of the bending moment is chosen so that a
positive value leads to a tensile stress at the bottom cords. The sign of the
shear force has been chosen such that it matches the sign of the bending
moment.
Double integration method
The double integration
method is a powerful tool in solving deflection and slope of a beam at any
point because we will be able to get the equation of the elastic curve.
Thus, EI / M = 1 / y''
.
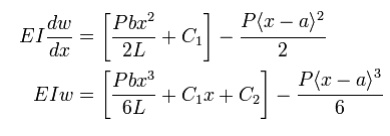
Macaulay Method
The starting point for
Maucaulay's method is the relation between bending
moment
and curvature
from Euler-Bernoulli beam theory
This equation is
simpler than the fourth-order beam equation and can be integrated twice to find
w if the value of M as a function of x is known. For
general loadings, M can be expressed in the form

where the quantities Pi(x-ai)
represent the bending moments due to point loads and the quantity (x-ai)
is a Macaulay bracket
defined as
Ordinarily, when
integrating P(x - a) we get
However, when
integrating expressions containing Macaulay brackets, we have
with the difference
between the two expressions being contained in the constant Cm.
Using these integration rules makes the calculation of the deflection of
Euler-Bernoulli beams simple in situations where there are multiple point loads
and point moments. The Macaulay method predates more sophisticated concepts
such as Dirac delta
functions and step
functions
but achieves the same outcomes for beam problems.
Example: Simply
supported beam with point load
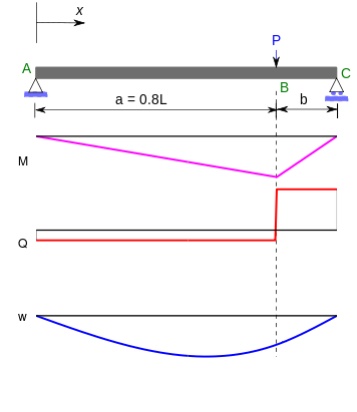
Simply supported beam with a single eccentric
concentrated load.
An illustration of the
Macaulay method considers a simply supported beam with a single eccentric
concentrated load as shown in the adjacent figure. The first step is to find M.
The reactions at the supports A and C are determined from the balance of forces
and moments as

Therefore RA
= Pb / L and the bending moment at a point D between A and B (0
< x < a) is given by
M =
RAx = Pbx / L
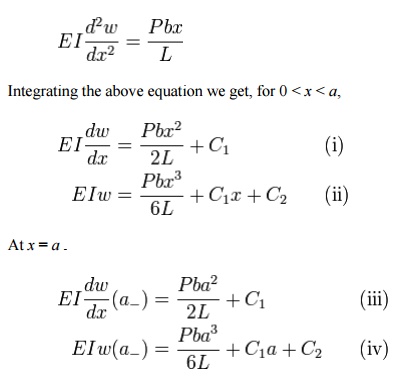
Using the
moment-curvature relation and the Euler-Bernoulli expression for the bending
moment, we have
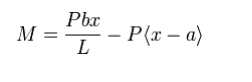
For a point D in the region BC (a < x
< L), the bending moment is
M
=
RAx - P(x - a) = Pbx / L -
P(x - a)
In Macaulay's approach
we use the Macaulay bracket
form of the above expression to represent the fact that a point load has been
applied at location B, i.e.,
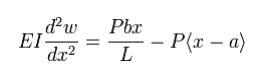
Therefore the
Euler-Bernoulli beam equation for this region has the form
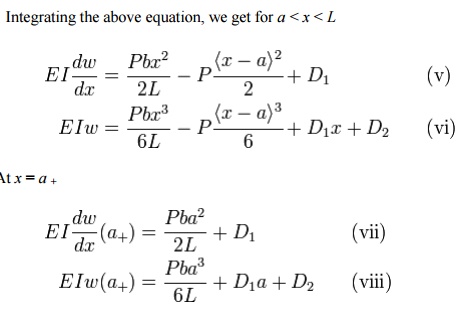
Comparing equations
(iii) & (vii) and (iv) & (viii) we notice that due to continuity at
point B, C1 = D1 and C2 =
D2. The above observation implies that for the two regions
considered, though the equation for bending moment
and hence for the curvature
are different, the constants of integration got during successive integration
of the equation for curvature for the two regions are the same.
The above argument
holds true for any number/type of discontinuities in the equations for
curvature, provided that in each case the equation retains the term for the
subsequent region
in the form ( x-a)n,
( x-b)n, ( x-c)n
etc. It should be remembered that for any x, giving the quantities
within the brackets, as in the above case, -ve should be neglected, and the
calculations should be made considering only the quantities which give +ve sign
for the terms within the brackets.
Reverting back to the
problem, we have
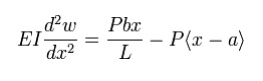
It is obvious that the
first term only is to be considered for x < a and both the
terms for x > a and the solution is
Note that the constants
are placed immediately after the first term to indicate that they go with the
first term when x < a and with both the terms when x
> a. The Macaulay brackets help as a reminder that the quantity on
the right is zero when considering points with x < a.
Moment area method
Theorems of Area-Moment Method
Theorem I
The change in slope
between the tangents drawn to the elastic curve at any two points A and B is
equal to the product of 1/EI multiplied by the area of the moment diagram
between these two points.
Theorem II
The deviation of any
point B relative to the tangent drawn to the elastic curve at any other point
A, in a direction perpendicular to the original position of the beam, is equal
to the product of 1/EI multiplied by the moment of an area about B of that part
of the moment diagram between points A and B.
Rules of Sign
1. The
deviation at any point is positive if the point lies above the tangent,
negative if the point is below the tangent.
2. Measured
from left tangent, if ? is counterclockwise, the change of slope is positive,
negative if ? is clockwise.
Columns –End conditions
Columns -end conditions
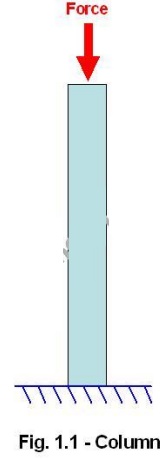
What is a Column or Strut?
Any machine member,
subjected to the axial compressive loading is called a strut and the vertical
strut is called column
The columns are
generally categorized in two types: short columns and long
columns. The one with length less than eight times the diameter (or approximate
diameter) is called short column and the one with length more than thirty times
the diameter (or approximate diameter) is called long column.
Ideally, the columns
should fail by crushing or compressive stress
and it normally happens for the short columns, however, the long columns, most
of the times, failure
occurs by buckling.
Euler’s Buckling Formula
To get the correct
results, this formula should only be applied for the long columns. The buckling
load calculated by the Euler formula is given by:
Fbe = (C*?2*E*I)/
Equivalent length of a
column
Strength Of Columns
A stick of timber, a
bar of iron,
etc., when used to sustain end loads which act lengthwise of the pieces, are
called columns,
posts, or struts if they are so long that they
would bend before breaking. When they are so short that they would not bend
before breaking, they are called short blocks, and their compressive strengths
are computed by means of equation 1. The strengths of columns cannot, however,
be so simply determined, and we now proceed to explain the method
of computing them.
77. End Conditions.
The strength of a column depends in part on the way in which its ends bear, or
are joined to other parts of a structure,
that is, on its " end conditions." There are practically but three
kinds of end conditions, namely:
1.
"Hinge"
or "pin" ends,
2.
" Flat" or " square
" ends, and
3.
"Fixed" ends.
(1)
When a column is fastened to its support
at one end by means of a pin about which the column could rotate if the other
end were free, it is said to be "hinged" or "pinned" at the
former end. Bridge posts or columns are often hinged at the ends.
(2)
A column either end of which is flat and
perpendicular to its axis and bears on other parts of the structure at that surface,
is said to be "flat" or " square" at that end.
(3)
Columns are sometimes riveted near their
ends directly to other parts of the structure and do not bear directly on their
ends; such are called " fixed ended." A column which bears on its
flat ends is often fastened near the ends to other parts of the structure, and
such an end is also said to be " fixed." The fixing of an end of a
column stiffens and therefore strengthens it more or less, but the strength of
a column with fixed ends is computed as though its ends were flat. Accordingly
we have, so far as strength is concerned, the following classes of columns:
78. Classes of Columns.
(1) Both ends hinged or pinned; (2) one end hinged and one flat; (3) both ends
flat.
Other things being the
same, columns of these three classes are unequal in strength. Columns of the first
class are the weakest, and those of the third class are the strongest.
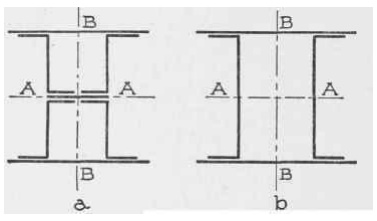
Fig. 46.
70. Cross=sections of
Columns. Wooden columns are usually solid,
square, rectangular, or round in section; but sometimes they are "built
up" hollow. Cast-iron
columns are practically always made hollow, and
rectangular or round in section. Steel columns are made of single rolled shapes
- angles, zees, channels,
etc.; but the larger ones are usually "built up" of several shapes.
Fig. 46, a, for example,
represents a cross-section of a "Z-bar" column; and Fig. 46, b, that
of a "channel" column.
80. Radius of Gyration.
There is a quantity appearing in almost all formulas for the strength of
columns, which is called "radius of gyration." It depends on the form
and extent of the cross-section of the column, and may be defined as follows:
The radius of gyration
of any plane
figure (as the section of a column) with respect to any line, is such a length
that the square of this length multiplied by the area of the figure equals the moment of
inertia of the figure with respect to the given
line.
Thus, if A denotes the
area of a figure; I, its moment of inertia with respect to some line; and r,
the radius: of gyration with respect to that line; then

(9)
In the column formulas,
the radius of gyration always refers to an axis through the center of gravity
of the cross-section, and usually to that axis with respect to which the radius
of gyration (and moment of inertia) is least. (For an exception, see example 3.
Art. 83.) Hence the radius of gyration in this connection
is often called for brevity the "least radius of gyration," or simply
the "least radius."
The moment of inertia
of the square with respect to the axis is 1/12 a4- Since A = a2, then, by
formula 9 above,

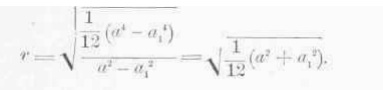
2. Prove that the value
of the radius of gyration given for the hollow square in Table A, page 54, is
correct.
The value of the moment
of inertia of the square with respect to the axis is 1/12 (a4 - a1 4). Since A
= a2 - a12,
Euler equation

A column under a
concentric axial load exhibiting the characteristic deformation of buckling
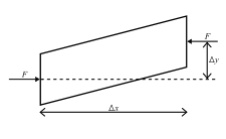
The eccentricity of the axial force results in a
bending moment acting on the beam element.
The ratio of the
effective length of a column
to the least radius of gyration
of its cross section is called the slenderness ratio (sometimes
expressed with the Greek letter lambda, ?). This ratio affords a means of
classifying columns. Slenderness ratio is important for design considerations.
All the following are approximate values used for convenience.
·
A short steel
column is one whose slenderness ratio does not exceed 50; an intermediate
length steel column has a slenderness ratio ranging from about 50 to 200, and
are dominated by the strength limit of the material, while a long steel column
may be assumed to have a slenderness ratio greater than 200.
·
A short concrete
column is one having a ratio of unsupported length to least dimension of the
cross section not greater than 10. If the ratio is greater than 10, it is a
long column (sometimes referred to as a slender column).
·
Timber
columns may be classified as short columns if the ratio of the length to least
dimension of the cross section is equal to or less than 10. The dividing line
between intermediate and long timber columns cannot be readily evaluated. One
way of defining the lower limit of long timber columns would be to set it as
the smallest value of the ratio of length to least cross sectional area that
would just exceed a certain constant K of the material. Since K depends on the modulus of
elasticity and the allowable compressive stress
parallel to the grain, it can be seen that this arbitrary limit would vary with
the species
of the timber. The value of K is given in most structural handbooks.
If the load on a column
is applied through the center of gravity
of its cross section, it is called an axial load.
A load at any other point in the cross section is known as an eccentric
load. A short column under the action of an axial load will fail by direct
compression before it buckles, but a long column loaded in the same manner will
fail by buckling (bending),
the buckling effect being so large that the effect of the direct load may be
neglected. The intermediate-length column will fail by a combination of direct
compressive stress and bending.
In 1757, mathematician Leonhard Euler
derived a formula that gives the maximum axial load that a long, slender, ideal
column can carry without buckling. An ideal column is one that is perfectly
straight, homogeneous, and free from initial stress. The maximum load,
sometimes called the critical load, causes the column to be in a state of
unstable equilibrium;
that is, the introduction of the slightest lateral force will cause the column
to fail by buckling. The formula derived by Euler for columns with no
consideration for lateral forces is given below. However, if lateral forces are
taken into consideration the value of critical load remains approximately the
same.
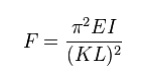
where
F = maximum or
critical force (vertical load
on column), E = modulus of
elasticity,
L
=
unsupported length of column,
K = column
effective length factor, whose value depends on the conditions of end support
of the column, as follows.
For both ends pinned (hinged, free to rotate), K
= 1.0. For both ends fixed, K = 0.50.
For
one end fixed and the other end pinned, K = 0.699....
For one end fixed and the other end free to move
laterally, K = 2.0. KL is the effective length of the column.
Examination of this
formula reveals the following interesting facts with regard to the load-bearing
ability of slender columns.
1. Elasticity
and not compressive strength of
the materials of the column determines the critical
load.
2. The
critical load is directly proportional
to the second moment
of area of the cross section.
The boundary conditions
have a considerable effect on the critical load of slender columns. The
boundary conditions determine the mode of bending and the distance between
inflection points on the deflected column. The closer together the inflection
points are, the higher the resulting capacity of the column.
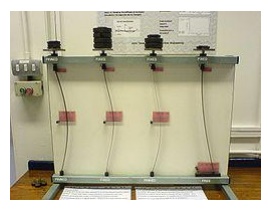
A demonstration model
illustrating the different "Euler" buckling modes. The model shows
how the boundary conditions affect the critical load of a slender column.
Notice that each of the columns are identical, apart from the boundary
conditions.
The strength of a
column may therefore be increased by distributing the material so as to
increase the moment of inertia. This can be done without increasing the weight
of the column by distributing the material as far from the principal axis of
the cross section as possible, while keeping the material thick enough to
prevent local buckling. This bears out the well-known fact that a tubular
section is much more efficient than a solid section for column service.
Another bit of
information that may be gleaned from this equation is the effect of length on
critical load. For a given size column, doubling the unsupported length
quarters the allowable load. The restraint offered by the end connections of a
column also affects the critical load. If the connections are perfectly rigid,
the critical load will be four times that for a similar column where there is
no resistance to rotation (hinged at the ends).
Since the moment of
inertia of a surface is its area multiplied by the square of a length called
the radius of gyration, the above formula may be rearranged as follows. Using
the Euler formula for hinged ends, and substituting A·r2 for I, the
following formula results.
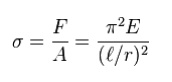
where F / A is the allowable stress of
the column, and l / r is the slenderness ratio.
Since structural
columns are commonly of intermediate length, and it is impossible to obtain an
ideal column, the Euler formula on its own has little practical application for
ordinary design. Issues that cause deviation from the pure Euler strut
behaviour include imperfections in geometry in combination with
plasticity/non-linear stress strain behaviour of the column's material.
Consequently, a number of empirical column formulae have been developed to
agree with test data, all of which embody the slenderness ratio. For design,
appropriate safety factors
are introduced into these formulae. One such formular is the Perry
Robertson
formula which estimates of the critical
buckling load based on an initial (small) curvature. The Rankine Gordon fomular
is also based on eperimental results and surgests that a strut will buckle at a
load Fmax given by:
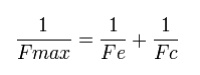
where Fe is the euler
maximum load and Fc is the maximum compresive load. This formular typically
produces a conservative estimate of Fmax.
Self-buckling
A free-standing,
vertical column, with density ?, Young's modulus E, and radius r,
will buckle under its own weight if its height exceeds a certain critical
height:
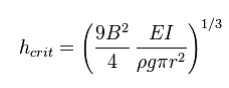
where g is the
acceleration due to gravity, I is the second moment
of area of the beam cross section, and B
is the first zero of the Bessel function
of the first kind of order -1/3, which is equal to 1.86635...
Slenderness ratio
Euler's Theory : The
struts which fail by buckling can be analyzed by Euler's theory. In the following
sections, different cases of the struts have been analyzed.
Case A: Strut with pinned ends:
Consider an axially
loaded strut, shown below, and is subjected to an axial load „P „P' produces a
deflectionAssume„y'that theatends are eitherdi pin jointed or rounded so that
there is no moment at either end.
Assumption:
The strut is assumed to
be initially straight, the end load being applied axially through centroid.
In this equation „M' is
not a functi directly as has been done in the case of deflection of beams by
integration method.
Though this equation is
in „y' but we maximum or minimum.
So the above differential equation can be arranged
in the following form
Let us define a operator
D = d/dx
(D2 + n2) y =0 where n2 = P/EI
This is a second order differential equation which
has a solution of the form consisting of complimentary function and particular
integral but for the time being we are interested in the complementary solution
only[in this P.I = 0; since the R.H.S of Diff. equation = 0]
Thus y = A cos (nx) + B sin (nx)
Where A and B are some constants.
Therefore
In order to evaluate the constants A and B let us
apply the boundary conditions,
(i)
at x = 0; y = 0
(ii)
at x = L ; y = 0
Applying the first boundary condition yields A = 0.
Applying the second boundary condition gives
From the above relationship
the least value of P which will cause the strut to buckle, and it is called the
" Euler Crippling Load " Pe from which w obtain.
The interpretation of
the above analysis is that for all the values of the load P, other than those
which make sin nL = 0; the strut will remain perfectly straight since
y = B sin nL = 0
For the particular value of
Then we say that the
strut is in a state of neutral equilibrium, and theoretically any deflection
which it suffers will be maintained. sensibly constant and in practice slight
increase in load at the critical value will cause the deflection to increase
appreciably until the material fails by yielding.
Further it should be
noted that the deflection is not proportional to load, and this applies to all
strut problems; like wise it will be found that the maximum stress is not
proportional to load.
The solution chosen of
nL = p is just one particular solution; the solutions nL= 2p, 3p, 5p etc are
equally valid mathematically and equally valid for modes of buckling of strut
different from that of a simple bow. Theoretically therefore, there are an
infinite number of values of Pe , each corresponding with a different mode of
buckling.
The value selected above is so called the
fundamental mode value and is the lowest critical load producing the single bow
buckling condition.
The solution nL = 2p produces buckling in two half
–waves, 3p in three half-waves etc.
If load is applied
sufficiently quickly to the strut, then it is possible to pass through the
fundamental mode and to achieve at least one of the other modes which are
theoretically possible. In practical loading situations, however, this is
rarely achieved since the high stress associated with the first critical
condition generally ensures immediate collapse.
Rankine formula for columns
Rankine's formula
One of the most widely
known formulae for the design and investigation of columns
employed in engineering practice:
where
= allowable unit
stress for the column
= allowable
unit stress for short columns
= a
constant
= length
= radius of
gyration in reference to an axis normal to a
plane in which flexure
takes
place
Related Topics