Chapter: Computer Graphics and Architecture
Computer Graphics
PREREQUISITE DISCUSSION:
In this
unit we discuss about drawing algorithms, clipping algorithms, How to find out
a pixel points In between line path and circle.
1. SURVEY
OF COMPUTER GRAPHICS, OVERVIEW OF GRAPHICS SYSTEMS :
CONCEPT:
1.Applications
2.Interaction to the real world
3.CAD/CAM
4.Videos,Musics
A picture
is completely specified by the set of intensities for the pixel positions inthe
display. Shapes and colors of the objects can be described internally with
pixelarrays into the frame buffer or with the set of the basic geometric –
structure such asstraight line segments and polygon color areas. To describe
structure of basic objectis referred to as output primitives.Each output
primitive is specified with input co-ordinate data and other information about
the way that objects is to be displayed. Additional output primitives that
canbe used to constant a picture include circles and other conic sections,
quadric surfaces, Spline curves and surfaces, polygon floor areas and character
string.
SIGNIFICANCE:
It is important to real world entertainment activities and
medical fields
2.VIDEO DISPLAY DEVICES, RASTER SCANSYSTEMS, RANDOM SCAN
SYSTEMS, GRAPHICS MONITORS AND WORKSTATIONS,INPUT DEVICES, HARD COPYDEVICES,
GRAPHICS SOFTWARE
CONCEPT:
Video display devices:
1.Primary
output device
2.Used
Cathode Ray tubes
3.Electrons emmitted and
reflected.
Raster Scansystems, Random
Scan Systems:
1.Afixed area of the system
2.Video controller is given direct
access in frame buffered.
3.The coordinate origin is defined at
the lower left screen corner.
Graphics Monitors And
Workstations
1.Diagonal
screen dimensions
2.12 to 2
inches
3.High definition graphics monitors
Input Devices & Hard
Copy devices
1.Key
board 2.Pen light 3.Joy sticks 4.Touch panels 5.Digitizers
* Printers
Impact printers
Non Impact printers
3. OUTPUT
PRIMITIVES
CONCEPT:
A picture is completely
specified by the set of intensities for the pixel positions in the display.
Shapes and colors of the objects can be described internally with pixel arrays
into the frame buffer or with the set of the basic geometric – structure such
as straight line segments and polygon color areas. To describe structure of
basic object is referred to as output primitives. Each output primitive is
specified with input co-ordinate data and other information about the way that
objects is to be displayed. Additional output primitives that can be used to
constant a picture include circles and other conic sections, quadric surfaces,
Spline curves and surfaces, polygon floor areas and character string.
4. POINTS AND LINES POINT
PLOTTING
CONCEPT
It is accomplished by
converting a single coordinate position furnished by an application program
into appropriate operations for the output device.
With a CRT monitor, for
example, the electron beam is turned on to illuminate the screen phosphor at
the selected location Line drawing is accomplished by calculating
intermediate positions along the line path between two specified end points
positions. An output device is then directed to fill in these positions between
the end points Digital devices display a straight line segment by plotting
discrete points between the two end points. Discrete coordinate positions along
the line path are calculated from the equation of the line.
For a raster video
display, the line color (intensity) is then loaded into the frame buffer at the
corresponding pixel coordinates. Reading from the frame buffer, the video
controller then plots “the screen pixels”. Pixel positions are referenced
according to scan-line number and column number (pixel
position across a scan line).
Scan lines are numbered
consecutively from 0, starting at the bottom of the screen; and pixel columns
are numbered from 0, left to right across each scan line Figure : Pixel
Postions reference by scan line number and column number To load an intensity
value into the frame buffer at a position corresponding to column x along scan
line y, setpixel (x, y) To retrieve the current frame buffer intensity setting
for a specified location we use a low level function getpixel (x, y)
SIGNIFICANCE:
It
is used to plot the points and lines within the coordinates.
LINE DRAWING ALGORITHMS
CONCEPT:
· Digital
Differential Analyzer (DDA) Algorithm
· Bresenham s Line Algorithm
· Parallel
Line Algorithm
The
Cartesian slope-intercept equation for a straight line is y = m . x + b (1)
Where m as slope of the line and b as the y intercept
(x2,y2)
as in figure we can determine the values for the slope m and y intercept b with
the following calculations
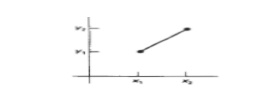
Line Path
between endpoint positions (x1,y1) and (x2,y2)
m = Δy /
Δx = y2-y1 / x2 - x1 (2)
b= y1 - m
. x1 (3) For any given x interval Δx along a line, we can compute the
corresponding y interval y Δy= m Δx (4) We can obtain the x interval Δx
corresponding to a specified Δy as x = y/m (5) For lines with slope magnitudes |m|
< 1, Δx can be set proportional to a small horizontal deflection voltage and
the corresponding vertical deflection is then set proportional to Δy as
calculated from Eq (4). For lines whose slopes have magnitudes |m | >1 , Δy
can be set proportional to a small vertical deflection voltage with the
corresponding horizontal deflection voltage set proportional to Δx, calculated
from Eq
(5) For lines with m = 1, Δx = Δy and
the horizontal and vertical deflections voltage are equal. Figure :
Straight line Segment with
five sampling positions along the x axis between x1 and x2
Digital Differential
Analyzer (DDA) Algortihm
The
digital differential analyzer (DDA) is a scan-conversion line algorithm based
on calculation either Δy or Δx The line at unit intervals in one coordinate and
determine corresponding integer values
nearest the line path for the other
coordinate.
A line
with positive slop, if the slope is less than or equal to 1, at unit x
intervals (Δx=1) and compute each successive y values as yk+1 = yk + m (6)
Subscript k takes integer values starting from 1 for the first point and
increases by 1 until the final endpoint is reached. m can be
any real number
between 0
and 1 and, the calculated y values must be rounded to the nearest integer For
lines with a positive slope greater than 1 we reverse the roles of x and y,
(Δy=1) and calculate each succeeding x
value as
xk+1 = xk + (1/m) (7) Equation (6) and (7) are based on the assumption that
lines are to be processed from the left endpoint to the right endpoint.
If this processing is
reversed, Δx=-1 that the starting endpoint is at the right yk+1 = yk – m (8)
When the slope is greater than 1 and Δy = -1 with xk+1 = xk-1(1/m) (9) If the
absolute value of the slope is less than 1 and the start endpoint is at the
left, we set Δx = 1 and calculate y values with Eq. (6) When the start
endpoint is at the right (for the same slope), we set Δx = -1 and obtain y
positions from Eq. (8) . Similarly, when the absolute value of a negative slope
is greater than 1, we use Δy = -1 and Eq. (9) or we use Δy = 1
and Eq. (7).
Algorithm
#define ROUND(a)
((int)(a+0.5))
void lineDDA
(int xa, int ya, int xb, int yb)
{ int dx = xb - xa, dy
= yb - ya, steps, k; float xIncrement, yIncrement, x = xa, y = ya; if (abs (dx)
> abs (dy) steps = abs (dx) ; else steps = abs dy); xIncrement = dx /
(float) steps; yIncrement = dy / (float) steps setpixel (ROUND(x), ROUND(y) ) :
for (k=0; k<steps; k++)
{ x +=
xIncrement; y += yIncrement; setpixel (ROUND(x), ROUND(y)); } } Algorithm
Description: Step 1 : Accept Input as two endpoint pixel positions
Step 2: Horizontal and
vertical differences between the endpoint positions are assigned to
parameters dx and dy (Calculate dx=xb-xa and dy=yb-ya).
Step 3: The difference with the greater magnitude
determines the value of parameter steps.
Step 4 : Starting with
pixel position (xa, ya), determine the offset needed at each step to generate
the next pixel position along the line path.
Step 5: loop the following process for steps number
of times
a.
Use a unit of increment or decrement in
the x and y direction
b.if
xa is less than xb the values of increment in the x and y directions are 1 and
m
c.if
xa is greater than xb then the decrements -1 and – m are used.
Advantages of DDA Algorithm
1. It
is the simplest algorithm
2. It is a is a faster method for calculating
pixel positions
Disadvantages of DDA Algorithm
1.Floating
point arithmetic in DDA algorithm is still time-consuming
2.End
point accuracy is poor
Bresenham’s Line Algorithm
An
accurate and efficient raster line generating algorithm developed by Bresenham,
that uses only incremental integer calculations. In addition, Bresenham![]() s line algorithm
can be adapted to display circles and other curves. To illustrate Bresenham's
approach, we- first consider the scan-conversion process for lines with
positive slope less than 1. Pixel positions along a line path are then
determined by sampling at unit x intervals. Starting from the left endpoint
(x0,y0) of a given line, we step to each successive column (x position) and
plot the pixel whose scan-line y value is closest to the line path.
s line algorithm
can be adapted to display circles and other curves. To illustrate Bresenham's
approach, we- first consider the scan-conversion process for lines with
positive slope less than 1. Pixel positions along a line path are then
determined by sampling at unit x intervals. Starting from the left endpoint
(x0,y0) of a given line, we step to each successive column (x position) and
plot the pixel whose scan-line y value is closest to the line path.
To
determine the pixel (xk,yk) is to be displayed, next to decide which pixel to
plot the column xk+1=xk+1.(xk+1,yk) and .(xk+1,yk+1).
At
sampling position xk+1, we label vertical pixel separations from the
mathematical line path as d1 and d2. The y coordinate on the mathematical line
at pixel column position xk+1 is calculated as y =m(xk+1)+b (1) Then d1 = y-yk
= m(xk+1)+b-yk d2 = (yk+1)-y = yk+1-m(xk+1)-b To determine which of the two
pixel is closest to the line path, efficient test that is based on the
difference between the two pixel separations d1- d2 = 2m(xk+1)-2yk+2b-1 (2) A
decision parameter Pk for the kth step in the line algorithm can be obtained by
rearranging equation (2).
By
substituting m=Δy/Δx where Δx and Δy are the vertical and horizontal
separations of the endpoint positions and defining the decision parameter as pk
= Δx (d1- d2) = 2Δy xk.-2Δx. yk + c (3) The sign of pk is the same as the sign
of d1- d2,since Δx>0
Parameter C is constant
and has the value 2Δy + Δx(2b -1) which is independent of the pixel position
and will be eliminated in the recursive calculations for Pk. If the pixel at yk
is “closer” to the line
path than the pixel at yk+1 (d1< d2) than
decision parameter Pk is negative.
In this case, plot the
lower pixel, otherwise plot the upper pixel. Coordinate changes along the line
occur in unit steps in either the x or y directions. To obtain the values of
successive decision parameters using incremental integer calculations.
At steps k+1, the
decision parameter is evaluated from equation (3) as Pk+1 = 2Δy xk+1-2Δx. yk+1
+c Subtracting the equation (3) from the preceding equation Pk+1 - Pk = 2Δy
(xk+1 - xk) -
2Δx(yk+1 - yk) But
xk+1= xk+1 so that Pk+1 = Pk+ 2Δy-2Δx(yk+1 - yk) (4) Where the term yk+1-yk is
either 0 or 1 depending on the sign of parameter Pk
This
recursive calculation of decision parameter is performed at each integer x
position, starting
at the left coordinate
endpoint of the line. The first parameter P0 is evaluated from equation at the
starting pixel position (x0,y0) and with m evaluated as Δy/Δx P0 = 2Δy-Δx (5)
Bresenham s line drawing for a line with a positive slope less than 1 in the
following outline of the algorithm. The constants 2Δy and2Δy-2Δx are calculated
once for each line to be scan converted. Bresenham’s line Drawing Algorithm
for |m| < 1
1.Input
the two line endpoints and store the left end point in (x0,y0)
2.load
(x0,y0) into frame buffer, ie. Plot the first point.
3.
Calculate the constants Δx, Δy, 2Δy and
obtain the starting value for the decision parameter as P0 = 2Δy-Δx
4.At
each xk along the line, starting at k=0 perform the following test
If Pk
< 0, the next point to plot is(xk+1,yk) and Pk+1 = Pk + 2Δy otherwise, the
next point to plot is (xk+1,yk+1) and Pk+1 = Pk + 2Δy - 2Δx 5. Perform step4 Δx
times.
Implementation of
Bresenham Line drawing Algorithm
void lineBres (int xa,int ya,int xb,
int yb)
{
int dx =
abs( xa – xb) , dy = abs (ya - yb); int p = 2 * dy – dx; int twoDy = 2 * dy,
twoDyDx = 2 *(dy - dx);
int x ,
y, xEnd; /* Determine which point to use as start, which as end * / if (xa >
x b ) { x = xb; y = yb; xEnd = xa; }
else { x = xa; y = ya; xEnd = xb; }
setPixel(x,y);
while(x<xEnd) { x++; if (p<0) p+=twoDy; { y++; p+=twoDyDx;
}
setPixel(x,y);
}
}
Advantages
Algorithm is Fast
Uses only integer calculations
Disadvantages
It is meant only for basic line
drawing.
Circle-Generating
Algorithms
General
function is available in a graphics library for displaying various kinds of
curves, including circles and ellipses.
Properties of a circle
A circle
is defined as a set of points that are all the given distance (xc,yc). This
distance relationship is expressed by the pythagorean theorem in Cartesian
coordinates as
(x – xc)2 + (y – yc) 2 = r2 (1) Use above equation to calculate
the position of points on a circle circumference by stepping along the x axis
in unit steps from xc-r to xc+r and calculating the corresponding y values at
each position as y = yc +(- ) (r2 – (xc –x )2)1/2
(2) This is not the best method for generating a circle for the following
reason Considerable amount
of
computation Spacing between plotted pixels is not uniform To eliminate the
unequal spacing is to calculate points along the circle boundary using polar
coordinates r and θ.
Expressing
the circle equation in parametric polar from yields the pair of equations x =
xc + rcos θ y = yc + rsin θ When a display is generated with these equations
using a fixed angular step size, a circle
is plotted with equally spaced points
along the circumference.
To reduce
calculations use a large angular separation between points along the
circumference and connect the points with straight line segments to approximate
the circular path. Set the angular step size at 1/r. This plots pixel positions
that are approximately one unit apart. The shape of the circle is similar in
each quadrant.
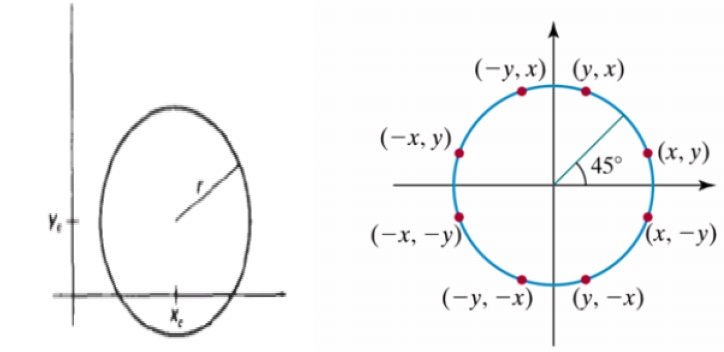
To
determine the curve positions in the first quadrant, to generate he circle
section in the second quadrant of the xy plane by nothing that the two circle
sections are symmetric with respect to the y axis and circle section in the
third and fourth quadrants can be obtained from sections in the first and
second quadrants by considering symmetry between octants.
\
Circle
sections in adjacent octants within one quadrant are symmetric with respect to
the 450 line dividing the two octants. Where a point at position (x, y) on a
one-eight circle sector is mapped into the seven circle points in the other
octants of the xy plane.
To generate all pixel positions around a circle by calculating only the points within the sector from x=0 to y=0. the slope of the curve in this octant has an magnitude less than of equal to 1.0. at x=0, the circle slope is 0 and at x=y, the slope is -1.0.
Midpoint circle Algorithm:
In the raster line algorithm at unit intervals and determine the closest pixel position to the specified circle path at each step for a given radius r and screen center position (xc,yc) set up our algorithm to calculate pixel positions around a circle path centered at the coordinate position by adding xc to x and yc to y.
To apply the midpoint method we define a circle function as fcircle(x,y) = x2+y2-r2 Any point (x,y) on the boundary of the circle with radius r satisfies the equation fcircle (x,y)=0. If the point is in the
interior of the circle, the circle function is negative. And if the point is
outside the circle the, circle function is positive fcircle (x,y) <0, if
(x,y) is inside the circle boundary =0, if (x,y) is on the circle boundary
>0, if (x,y) is outside the circle boundary
The tests in the above
eqn are performed for the midposition sbteween pixels near the circle path at
each sampling step. The circle function is the decision parameter in the
midpoint algorithm.
.Ellipse-Generating
Algorithms
An
ellipse is an elongated circle. Therefore, elliptical curves can be generated
by modifying circle-drawing procedures to take into account the different
dimensions of an ellipse along the major and minor axes.
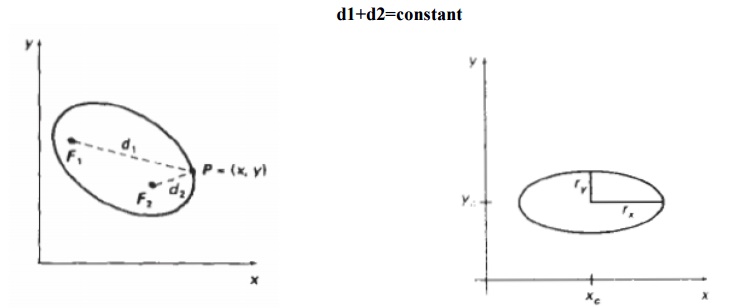
Properties of ellipses
An
ellipse can be given in terms of the distances from any point on the ellipse to
two fixed positions called the foci of the ellipse. The sum of these two
distances is the same values for all points on the ellipse. If the distances to
the two focus positions from any point p=(x,y) on the ellipse are labeled d1
and d2, then the general equation of an ellipse can be stated as
d1+d2=constant
Midpoint ellipse Algorithm
The
midpoint ellipse method is applied throughout the first quadrant in two parts.
The below figure show the division of the first quadrant according to the slope
of an ellipse with rx<ry. In the x direction where the slope of the curve
has a magnitude less than 1 and unit steps in the y direction where the slope
has a magnitude greater than 1. Region 1 and 2 can be processed in various ways
1. Start at position (0,ry) and step clockwise along the elliptical
path in the first quadrant shifting from unit steps in x to unit steps in y
when the slope becomes less than -1
2. Start at (rx,0) and select points in a counter clockwise order.
2.1 Shifting from unit steps in y to unit steps in x when the slope becomes
greater than -1.0 2.2 Using parallel processors calculate pixel positions in
the two regions simultaneously
3. Start
at (0,ry) step along the ellipse path in clockwise order throughout the first
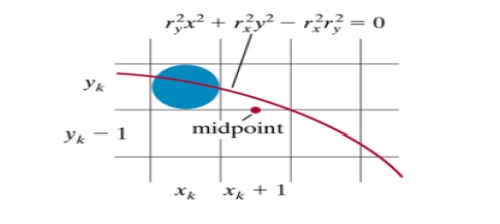
quadrant ellipse function (xc,yc)=(0,0)
fellipse
(x,y)=ry2x2+rx2y2 –rx2 ry2 which has the following properties: fellipse (x,y)
<0, if (x,y) is inside the ellipse boundary =0, if(x,y) is on ellipse
boundary >0, if(x,y) is outside the ellipse boundary Thus, the ellipse
function
fellipse
(x,y) serves as the decision parameter in the midpoint algorithm. Starting at
(0,ry): Unit steps in the x direction until to reach the boundary between
region 1 and region 2. Then switch to unit steps in the y direction over the
remainder of the curve in the first quadrant. At each step to test the value of
the slope of the curve. The ellipse slope is calculated dy/dx= -(2ry2x/2rx2y)
At the boundary between region 1 and region 2 dy/dx = -1.0 and 2ry2x=2rx2y to
more out of region 1 whenever 2ry2x>=2rx2y
To
determine the next position along the ellipse path by evaluating the decision
parameter at this mid point P1k = fellipse (xk+1,yk-1/2) = ry2 (xk+1)2 + rx2
(yk-1/2)2 – rx2 ry2 if P1k <0,
The
midpoint is inside the ellipse and the pixel on scan line yk is closer to the
ellipse boundary. Otherwise the midpoint is outside or on the ellipse boundary
and select the pixel on scan line yk-1 At the next sampling position
(xk+1+1=xk+2) the decision parameter for region 1 is calculated as p1k+1 =
fellipse(xk+1 +1,yk+1 -½ ) =ry2[(xk +1) + 1]2 + rx2 (yk+1 -½)2 - rx2 ry2
Mid point Ellipse Algorithm
1. Input rx,ry and ellipse center (xc,yc) and obtain
the first point on an ellipse centered on the origin as
(x0,y0) = (0,ry)
2. Calculate the initial value of the decision
parameter in region 1 as
P10=ry2-rx2ry +(1/4)rx2
3. At each xk position
in region1 starting at k=0 perform the following test. If P1k<0, the next
point along the ellipse centered on (0,0) is (xk+1, yk) and
p1k+1 = p1k +2 ry2xk +1
+ ry2 Otherwise the next point along the ellipse is (xk+1, yk-1) and p1k+1 =
p1k +2 ry2xk +1 - 2rx2 yk+1 + ry2 with 2 ry2xk +1 = 2 ry2xk + 2ry2 2 rx2yk +1 =
2 rx2yk + 2rx2 And continue until 2ry2 x>=2rx2 y
4. Calculate the
initial value of the decision parameter in region 2 using the last point
(x0,y0) is the last position calculated in region 1.
p20 = ry2(x0+1/2)2+rx2(yo-1)2 – rx2ry2
5. At each position yk
in region 2, starting at k=0 perform the following test, If p2k>0 the next
point along the ellipse centered on (0,0) is (xk,yk-1) and
p2k+1 = p2k – 2rx2yk+1+rx2 Otherwise the next point
along the ellipse is (xk+1,yk-1) and
p2k+1 = p2k + 2ry2xk+1
– 2rxx2yk+1 + rx2 Using the same incremental calculations for x any y as in
region 1.
7.
6. Determine symmetry points in the
other three quadrants. Move each calculate pixel position (x,y) onto the
elliptical path centered on (xc,yc) and plot the coordinate values
x=x+xc, y=y+yc
8.Repeat
the steps for region1 unit 2ry2x>=2rx2y
SIGNIFICANCE:
Draw a circle ,lines and ellipse using Differant types of
algorithms.
Line function
Any parameter that affects the way a
primitive is to be displayed is referred to as an attribute parameter.
1.Line
Attributes
2.Curve
Attributes
3.Color
and Grayscale Levels
4.Area
Fill Attributes
5.Character
Attributes
6.Bundled
Attributes
Line Attributes
Basic attributes of a
straight line segment are its type, its width, and its color. In some graphics
packages, lines can also be displayed using selected pen or brush options
Line Type
Line Width
Pen and Brush Options
Line Color
Line type
Possible
selection of line type attribute includes solid lines, dashed lines and dotted
lines. To set line type attributes in a PHIGS application program, a
user invokes the function
setLinetype (lt)
Line width
Implementation
of line width option depends on the capabilities of the output device to set
the line width attributes.
setLinewidthScaleFactor(lw)
Line Cap
We can adjust the shape
of the line ends to give them a better appearance by adding line caps.
There are three types of line cap. They are
Butt cap
Round cap
Projecting square cap
Pen and Brush Options
With some
packages, lines can be displayed with pen or brush selections. Options in this
category include shape, size, and pattern. Some possible pen or brush shapes
setPolylineColourIndex
(lc)
Curve attributes
Parameters
for curve attribute are same as those for line segments. Curves displayed with
varying colors, widths, dot –dash patterns and available pen or brush options
Area fill Attributes
Options
for filling a defined region include a choice between a solid color or a
pattern fill and choices for particular colors and patterns Fill Styles
Areas are displayed with three basic fill styles: hollow with a color border,
filled with a solid color, or filled with a specified pattern or design. A
basic fill style is selected in a PHIGS program with the function
Character Attributes
The
appearance of displayed character is controlled by attributes such as font,
size, color and orientation. Attributes can be set both for entire character
strings (text) and for individual characters defined as marker symbols
Text Attributes
The
choice of font or type face is set of characters with a particular design style
as courier, Helvetica, times roman, and various symbol groups.
SIGNIFICANCE:
Different
types of functions used to implement line circle.
5. PIXEL ADDRESSING AND
OBJECTGEOMETRY
CONCEPT:
1.Pixel Value Is An
Intensity Value It Is Stored In Frame Buffered
2.Particular All Images
Are Descibed In Pixels.
SIGNIFICANCE:
It
is used to stored a pixel value in the frame buffer
6. FILLED AREA
PRIMITIVES
1.Set the width of line-clipping
2.Set color of particular pictures
APPLICATIONS:
1Implement. Line,circle,ellipse drawing algorithm.
2.Importance of CRT monitors
3.Implement loading the frame buffer.
Related Topics