Chapter: Computer Graphics and Architecture
Three Dimensional Graphics
THREE
DIMENSIONAL CONCEPTS
1. CONCEPT:
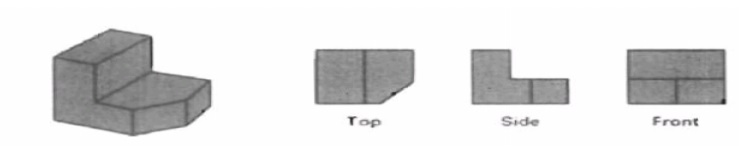
Parallel Projection:
Parallel projection is
a method for generating a view of a solid object is to project points on the
object surface along parallel lines onto the display plane.
In parallel projection,
parallel lines in the world coordinate scene project into parallel lines on the
two dimensional display planes.
This technique is used
in engineering and architectural drawings to represent an object with a set of
views that maintain relative proportions of the object.
The appearance of the
solid object can be reconstructed from the major views
Perspective Projection:
It is a method for
generating a view of a three dimensional scene is to project points to the
display plane alone converging paths.
This makes objects
further from the viewing position be displayed smaller than objects of the same
size that are nearer to the viewing position.
In a perspective
projection, parallel lines in a scene that are not parallel to the display
plane are projected into converging lines.
SIGNIFICANCE:
Scenes displayed using
perspective projections appear more realistic, since this is the way that our
eyes and a camera lens form images.
2. THREE-DIMENSIONAL
OBJECT REPRESENTATIONS
CONCEPT
Three Dimensional Object Representations
Representation schemes
for solid objects are divided into two categories as follows: 1. Boundary
Representation ( B-reps)
It describes a three
dimensional object as a set of surfaces that separate the object interior from
the environment. Examples are polygon facets and spline patches.
2. Space Partitioning representation
Eg: Octree Representation
SIGNIFICANCE:
It
Describes The Interior Properties, By Partitioning The Spatial Region
Containing An Object Into A Set Of Small, Nonoverlapping, Contiguous
Solids(Usually Cubes).
3.
POLYGON SURFACES POLYGONTABLES- PLANE EQUATIONS - POLYGON MESHES
CONCEPT
Polygon surfaces are
boundary representations for a 3D graphics object is a set of polygons that
enclose the object interior. Polygon Tables
The polygon surface is specified with a set of
vertex coordinates and associated attribute parameters.
For each polygon input, the data are placed into
tables that are to be used in the subsequent processing.
Polygon data tables can be organized into two
groups: Geometric tables and attribute tables.
Geometric Tables
Contain
vertex coordinates and parameters to identify the spatial orientation of the
polygon surfaces. Attribute tables Contain attribute information for an
object such as parameters specifying the degree of transparency of the object
and its surface reflectivity and texture characteristics.
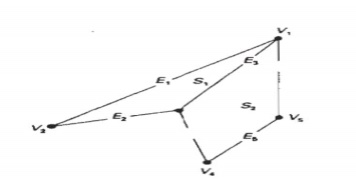
Vertex table Edge Table
Polygon surface table V1 : X1, Y1, Z1 E1 : V1, V2 S1 :
E1, E2, E3 V2 : X2, Y2, Z2 E2 : V2, V3 S2 : E3, E4, E5, E6 V3 : X3, Y3,
Z3 E3 : V3, V1 V4 : X4, Y4, Z4 E4 : V3, V4 V5 : X5, Y5, Z5 E5 : V4, V5 E6 : V5,
V1
Listing the geometric
data in three tables provides a convenient reference to the individual
components (vertices, edges and polygons) of each object.
The object can be displayed efficiently by using
data from the edge table to draw the component lines.
Extra information can
be added to the data tables for faster information extraction. For instance,
edge table can be expanded to include forward points into the polygon table so
that common edges between polygons can be identified more rapidly.
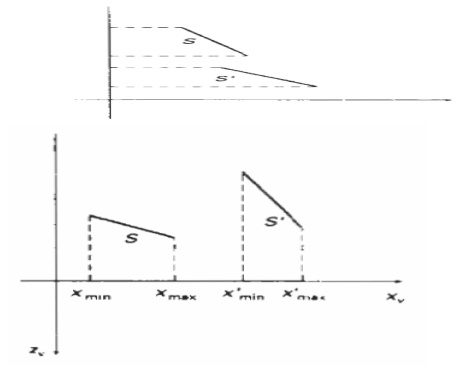
vertices are input, we
can calculate edge slopes and we can scan the coordinate values to identify the
minimum and maximum x, y and z values for individual polygons.
The more information included in the data tables
will be easier to check for errors.
Some of the tests that could be performed by a
graphics package are:
1.That
every vertex is listed as an endpoint for at least two edges.
2.That
every edge is part of at least one polygon.
3.That
every polygon is closed.
4.That
each polygon has at least one shared edge.
5.That
if the edge table contains pointers to polygons, every edge referenced by a
polygon pointer has a reciprocal pointer back to the polygon.
Plane Equations:
To produce a display of
a 3D object, we must process the input data representation for the object
through several procedures such as,
- Transformation
of the modeling and world coordinate descriptions to viewing coordinates.
- Then
to device coordinates:
- Identification
of visible surfaces
- The
application of surface-rendering procedures.
For these processes, we
need information about the spatial orientation of the individual surface
components of the object. This information is obtained from the vertex
coordinate value and the equations that describe the polygon planes.
The
equation for a plane surface is Ax + By+ Cz + D = 0 ----(1) Where (x, y, z) is
any point on the plane, and the coefficients A,B,C and D are constants
describing the spatial properties of the plane.
Polygon Meshes
A single plane surface
can be specified with a function such as fillArea. But when object
surfaces are to be tiled, it is more convenient to specify the surface facets
with a mesh function.
One type of polygon
mesh is the triangle strip.A triangle strip formed with 11 triangles
connecting 13 vertices.
This function produces n-2 connected triangles given
the coordinates for n vertices.
4. CURVED LINES AND
SURFACES
CONCEPT:
Displays of three
dimensional curved lines and surface can be generated from an input set of
mathematical functions defining the objects or from a set of user specified
data points.
When functions are
specified, a package can project the defining equations for a curve to the
display plane and plot pixel positions along the path of the projected
function.
For surfaces, a
functional description in decorated to produce a polygon-mesh approximation to
the surface.
5. QUADRIC SURFACES
The quadric surfaces are described with second
degree equations (quadratics).
They include spheres, ellipsoids, tori, parabolids,
and hyperboloids.
Sphere
In Cartesian
coordinates, a spherical surface with radius r centered on the coordinates
origin is defined as the set of points (x, y, z) that satisfy the equation.
x2 + y2 + z2 = r2
Ellipsoid
Ellipsoid surface is an
extension of a spherical surface where the radius in three mutually
perpendicular directions can have different values
6. SPLINE
REPRESENTATIONS
CONCEPT:
A Spline is a flexible
strip used to produce a smooth curve through a designated set of points.
Several small weights
are distributed along the length of the strip to hold it in position on the
drafting table as the curve is drawn.
The Spline curve
refers to any sections curve formed with polynomial sections satisfying
specified continuity conditions at the boundary of the pieces.
A Spline surface can be described with two
sets of orthogonal spline curves.
Splines are used in
graphics applications to design curve and surface shapes, to digitize drawings
for computer storage, and to specify animation paths for the objects or the
camera in the scene. CAD applications for splines include the design of
automobiles bodies, aircraft and spacecraft surfaces, and ship hulls.
Interpolation and Approximation Splines
Spline curve can be
specified by a set of coordinate positions called control points which
indicates the general shape of the curve.
These control points
are fitted with piecewise continuous parametric polynomial functions in one of
the two ways.
When polynomial
sections are fitted so that the curve passes through each control point the
resulting curve is said to interpolate the set of control points.
A set of six control points interpolated
with piecewise continuous polynomial sections
When the polynomials
are fitted to the general control point path without necessarily passing
through any control points, the resulting curve is said to approximate
the set of control points.
A set of six control points approximated
with piecewise continuous polynomial sections
Interpolation curves are used to digitize drawings
or to specify animation paths.
Approximation curves are used as design tools to
structure object surfaces.
A spline curve is
designed , modified and manipulated with operations on the control points.The
curve can be translated, rotated or scaled with transformation applied to the
control points.
The convex polygon boundary that encloses a set of
control points is called the convex hull.
The shape of the convex
hull is to imagine a rubber band stretched around the position of the control
points so that each control point is either on the perimeter of the hull or
inside it.
Parametric Continuity Conditions
For a smooth transition
from one section of a piecewise parametric curve to the next various continuity
conditions are needed at the connection points.
If each section of a spline in described with a set
of parametric coordinate functions or the form
x = x(u),
y = y(u), z = z(u), u1<= u <= u2
Zero order parametric
continuity referred to as C0 continuity, means that
the curves meet. (i.e) the values of x,y, and z evaluated at u2 for the
first curve section are equal. Respectively, to the value of x,y, and z
evaluated at u1 for the next curve section.
First order parametric
continuity referred to as C1 continuity means that
the first parametric derivatives of the coordinate functions in equation
(a) for two successive curve sections are equal at their joining point.
Second order parametric
continuity, or C2 continuity means that both the first
and second parametric derivatives of the two curve sections are equal at
their intersection.
Geometric Continuity Conditions
To specify conditions
for geometric continuity is an alternate method for joining two successive
curve sections.
The parametric
derivatives of the two sections should be proportional to each other at their
common boundary instead of equal to each other.
Zero order Geometric
continuity referred as G0 continuity means that the two curves sections must
have the same coordinate position at the boundary point.
First order Geometric
Continuity referred as G1 continuity means that the parametric first
derivatives are proportional at the interaction of two successive sections.
Second order Geometric
continuity referred as G2 continuity means that both the first and second
parametric derivatives of the two curve sections are proportional at their
boundary. Here the curvatures of two sections will match at the joining
position.
SIGNIFICANCE:
A spline curve is
designed , modified and manipulated with operations on the control points.The
curve can be translated, rotated or scaled with transformation applied to the
control points.
7. VISUALIZATION
OF DATA SETS
CONCEPT:
The use of graphical
methods as an aid in scientific and engineering analysis is commonly referred
to as scientific visualization.
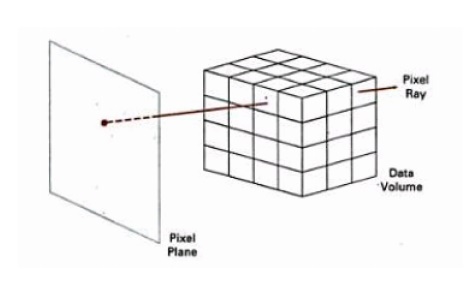
This involves the
visualization of data sets and processes that may be difficult or impossible to
analyze without graphical methods. Example medical scanners, satellite and
spacecraft scanners.
Visualization
techniques are useful for analyzing process that occur over a long period of
time or that cannot observed directly. Example quantum mechanical phenomena and
special relativity effects produced by objects traveling near the speed of
light.
Scientific
visualization is used to visually display , enhance and manipulate information
to allow better understanding of the data.
Similar methods
employed by commerce , industry and other nonscientific areas are sometimes
referred to as business visualization.
Data sets are
classified according to their spatial distribution ( 2D or 3D ) and according
to data type (scalars , vectors , tensors and multivariate data ).
Visual representation for Vector fields
A vector quantity V in three-dimensional space has
three scalar values ( Vx , Vy,Vz, ) one for each coordinate direction, and a two-dimensional
vector has two components (Vx, Vy,). Another way to describe a vector
quantity is by giving its magnitude IV I and its direction as a unit vector
u. As with scalars, vector quantities may be functions of position,
time, and other parameters. Some examples of physical vector quantities are
velocity, acceleration, force, electric fields, magnetic fields, gravitational
fields, and electric current.
One way
to visualize a vector field is to plot each data point as a small arrow that
shows the magnitude and direction of the vector. This method is most often used
with cross-sectional slices, since it can be difficult to see the trends in a
three-dimensional region cluttered with overlapping arrows. Magnitudes for the
vector values can be shown by varying the lengths of the arrows. Vector values
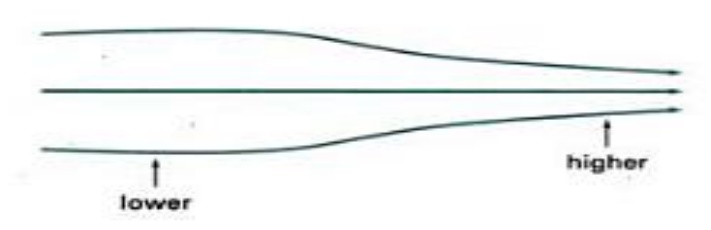
are also represented by plotting field lines or streamlines .
Field lines are commonly used for electric , magnetic and gravitational fields.
The magnitude of the vector values is indicated by spacing between field lines,
and the direction is the tangent to the field.
Visual Representations for
Tensor Fields
A tensor
quantity in three-dimensional space has nine components and can be represented
with a 3 by 3 matrix. This representation is used for a second-order tensor,
and higher-order tensors do occur in some applications. Some examples of
physical, second-order tensors are stress and strain in a material subjected to
external forces, conductivity of an electrical conductor, and the metric
tensor, which gives the properties of a particular coordinate space.
SIGNIFICANCE:
The use of graphical
methods as an aid in scientific and engineering analysis is commonly referred
to as scientific visualization.
7. THREE
DIMENSIONAL GEOMETRIC AND MODELING TRANSFORMATIONS:
CONCEPT:
Geometric
transformations and object modeling in three dimensions are extended from
two-dimensional methods by including considerations for the z-coordinate
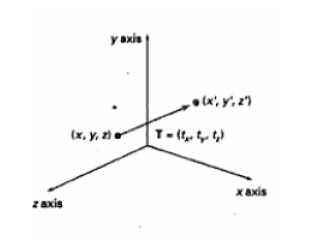
Translation
In a
three dimensional homogeneous coordinate representation, a point or an object is
translated from position P = (x,y,z) to position P’ = (x’,y’,z’) with the matrix operation.
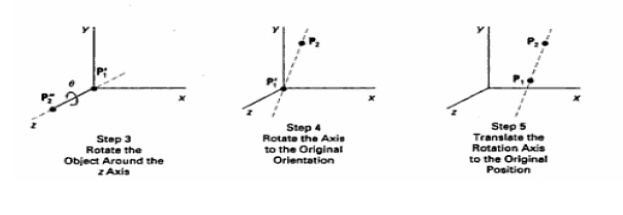
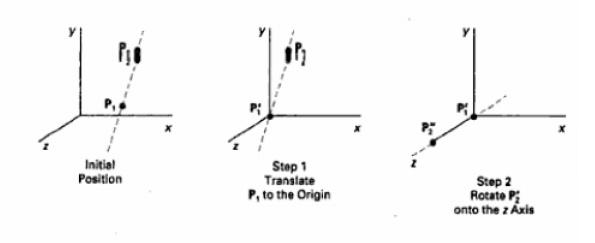
Rotation
To generate a rotation
transformation for an object an axis of rotation must be designed to rotate the
object and the amount of angular rotation is also be specified.
Positive rotation angles produce counter clockwise
rotations about a coordinate axis.
Co-ordinate Axes Rotations
The 2D z axis rotation
equations are easily extended to 3D. x = x cos θ –
y sin θ
Scaling
The
matrix expression for the scaling transformation of a position P = (x,y,.z)
Scaling an object
changes the size of the object and repositions the object relatives to the
coordinate origin.
If the transformation
parameters are not equal, relative dimensions in the object are changed. The
original shape of the object is preserved with a uniform scaling (sx = sy= sz)
.
Scaling with respect to
a selected fixed position (x f, yf, zf) can be represented with the following
transformation sequence:
1.
Translate the fixed point
to the origin. 2. Scale the object relative to the coordinate origin

Other Transformations
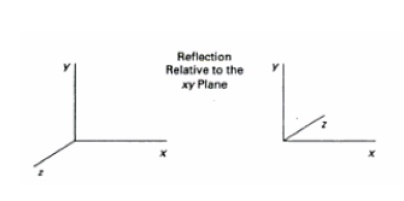
Reflections
A 3D reflection can be
performed relative to a selected reflection axis or with respect to a selected
reflection plane.
Reflection relative to
a given axis are equivalent to 1800 rotations about the axis. Reflection
relative to a plane are equivalent to 1800 rotations in 4D space.
When the reflection plane in a coordinate plane (
either xy, xz or yz) then the transformation can be a conversion between
left-handed and right-handed systems.
Shears
Shearing transformations are used to modify object
shapes.
They are also used in three dimensional viewing for
obtaining general projections transformations.
The following transformation produces a z-axis
shear.
Composite Transformation
Composite three
dimensional transformations can be formed by multiplying the matrix
representation for the individual operations in the transformation sequence.
This concatenation is
carried out from right to left, where the right most matrixes is the first
transformation to be applied to an object and the left most matrix is the last
transformation.
A sequence of basic,
three-dimensional geometric transformations is combined to produce a single
composite transformation which can be applied to the coordinate definition of
an object.
Three Dimensional Transformation
Functions
Some of the basic 3D
transformation functions are: translate ( translateVector, matrixTranslate)
rotateX(thetaX, xMatrixRotate) rotateY(thetaY, yMatrixRotate) rotateZ(thetaZ,
zMatrixRotate) scale3 (scaleVector, matrixScale)
Each of these functions
produces a 4 by 4 transformation matrix that can be used to transform
coordinate positions expressed as homogeneous column vectors.
Parameter translate Vector is a pointer to list of
translation distances tx, ty, and tz.
Parameter scale vector specifies the three scaling
parameters sx, sy and sz.
Rotate and scale matrices transform objects with
respect to the coordinate origin.
Composite transformation can be constructed with the
following functions:
composeMatrix3
buildTransformationMatrix3 composeTransformationMatrix3 The order of the
transformation sequence for the buildTransformationMarix3 and composeTransfomationMarix3
functions, is the same as in 2 dimensions:
1.scale
2.rotate
3.translate
Once a transformation matrix is specified, the
matrix can be applied to specified points with
transformPoint3 (inPoint, matrix, outpoint)
The transformations for hierarchical construction
can be set using structures with the function
setLocalTransformation3
(matrix, type) where parameter matrix specifies the elements of a 4 by 4
transformation matrix and parameter type can be assigned one of the values of:
Preconcatenate, Postconcatenate, or replace.
SIGNIFICANCE:
A 3D reflection can be
performed relative to a selected reflection axis or with respect to a selected
reflection plane.
8. THREE-DIMENSIONAL
VIEWING
CONCEPT:
In three dimensional graphics applications,
- we
can view an object from any spatial position, from the front, from above or
from the back.
-
We could generate a view of what we
could see if we were standing in the middle of a group of objects or inside
object, such as a building.
Viewing Pipeline:
In the view of a three dimensional scene, to take a
snapshot we need to do the following steps.
1.Positioning
the camera at a particular point in space.
2.Deciding
the camera orientation (i.e.,) pointing the camera and rotating it around the
line of right to set up the direction for the picture.
3.When
snap the shutter, the scene is cropped to the size of the „window ![]() of the
camera and light from the visible surfaces is projected into the camera film.
of the
camera and light from the visible surfaces is projected into the camera film.
In such a
way the below figure shows the three dimensional transformation pipeline, from
modeling coordinates to final device coordinate.
Processing Steps
1.
Once the scene has been modeled, world
coordinates position is converted to viewing coordinates.
2.The
viewing coordinates system is used in graphics packages as a reference for
specifying the observer viewing position and the position of the projection
plane.
3.
Projection operations are performed to
convert the viewing coordinate description of the scene to coordinate positions
on the projection plane, which will then be mapped to the output device.
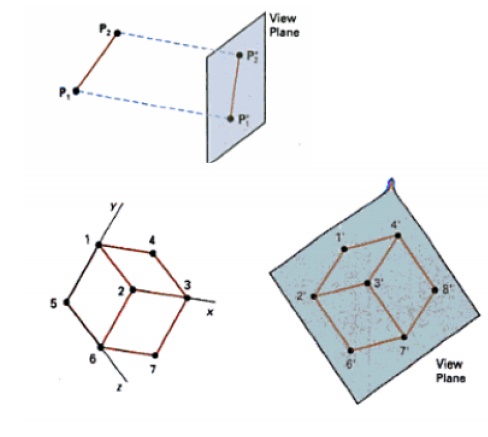
A viewplane or projection plane is
set-up perpendicular to the viewing Zv axis.
World coordinate
positions in the scene are transformed to viewing coordinates, then viewing
coordinates are projected to the view plane.
The view reference
point is a world coordinate position, which is the origin of the viewing
coordinate system. It is chosen to be close to or on the surface of some object
in a scene.
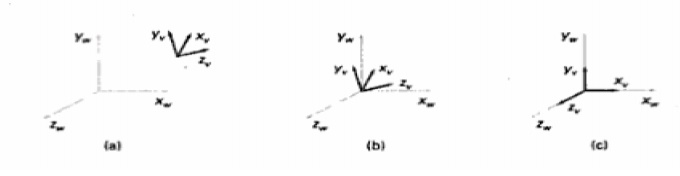
2.
Then we select the positive direction
for the viewing Zv axis, and the orientation of the view plane by specifying
the view plane normal vector, N. Here the world coordinate position
establishes the direction for N relative either to the world origin or to the
viewing coordinate origin.

Transformation from world
to viewing coordinates
Before object
descriptions can be projected to the view plane, they must be transferred to
viewing coordinate. This transformation sequence is,
1.Translate
the view reference point to the origin of the world coordinate system.
2.Apply
rotations to align the xv, yv and zv axes with the world xw,yw and zw axes
respectively.
If
the view reference point is specified at world position(x0,y0,z0) this point is
translated to the world origin with the matrix transformation.
Another method for
generation the rotation transformation matrix is to calculate unit uvn vectors
and form the composite rotation matrix directly.
Given vectors N and V, these unit vectors are
calculated as
n
= N / (|N|) = (n1, n2, n3) u = (V*N) / (|V*N|) = (u1, u2, u3) v = n*u = (v1,
v2, v3) This method automatically adjusts the direction for v, so that v is
perpendicular to n.
The composite rotation matrix for the viewing
transformation is
u1 u2 u3 0 R = v1 v2 v3 0 n1 n2 n3 0 0 0 0 1
which transforms u into the world xw
axis, v onto the yw axis and n onto the zw axis
Projections
Once world coordinate
descriptions of the objects are converted to viewing coordinates, we can
project the 3 dimensional objects onto the two dimensional view planes.
There are two basic types of projection.
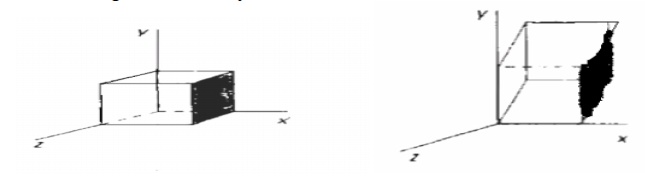
1. Parallel
Projection - Here the coordinate positions are transformed to the view
plane along parallel lines.
Parallel projection of an object to the view plan
SIGNIFICANCE:
In three dimensional
graphics applications, we can view an object from any spatial position, from
the front, from above or from the back.
9. VISIBLE
SURFACE IDENTIFICATION
CONCEPT
A major
consideration in the generation of realistic graphics displays is identifying
those parts of a scene that are visible from a chosen viewing position.
Classification of Visible Surface
Detection Algorithms
These are classified
into two types based on whether they deal with object definitions directly or
with their projected images
1. Object Space Methods:
compares objects and
parts of objects to each other within the scene definition to determine which
surfaces as a whole we should label as visible.
2. Image space methods:
visibility is decided
point by point at each pixel position on the projection plane. Most Visible
Surface Detection Algorithms use image space methods.
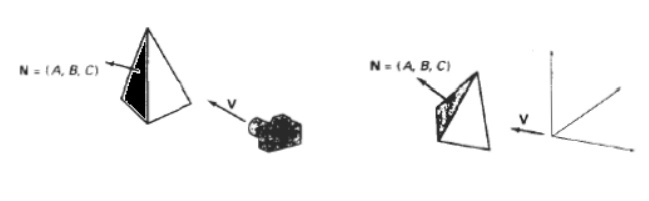
Back
Face Detection
A point (x, y,z) is "inside" a polygon surface with plane parameters A, B, C, and D if Ax + By + Cz + D < 0 ----------------(1 ) When an inside point is along the line of sight to the surface, the polygon must be a back face .
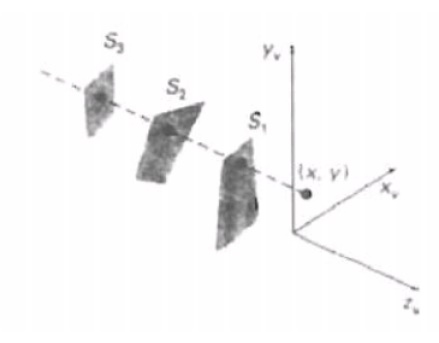
Depth Buffer Method
A
commonly used image-space approach to detecting visible surfaces is the
depth-buffer method, which compares surface depths at each pixel position on
the projection plane.
This
procedure is also referred to as the z-buffer method. Each surface of a scene
is processed separately, one point at a time across the surface. The method is
usually applied to scenes containing only polygon surfaces, because depth
values can be computed very quickly and the method is easy to implement.
But the
mcthod can be applied to nonplanar surfaces. With object descriptions converted
to projection coordinates, each (x, y, z) position on a polygon surface
corresponds to the orthographic projection point (x, y) on the view plane.
We can implement the
depth-buffer algorithm in normalized coordinates, so that z
values range from 0 at the back clipping plane to Zmax at the
front clipping plane.
Two buffer areas are
required.A depth buffer is used to store depth values for each (x, y)
position as surfaces are processed, and the refresh buffer stores the
intensity values for each position.
Initially,all positions
in the depth buffer are set to 0 (minimum depth), and the refresh buffer is
initialized to the background intensity. We summarize the steps of a
depth-buffer algorithm as follows: 1. Initialize the depth buffer and
refresh buffer so that for all buffer positions (x, y), depth (x, y)=0,
refresh(x , y )=Ibackgnd 2. For each position on each polygon surface, compare
depth values to previously stored values in the depth buffer to determine
visibility.
Calculate the depth z for each (x, y) position on
the polygon.
If z > depth(x, y), then set
depth ( x, y)=z , refresh(x,y)=
Isurf(x, y)
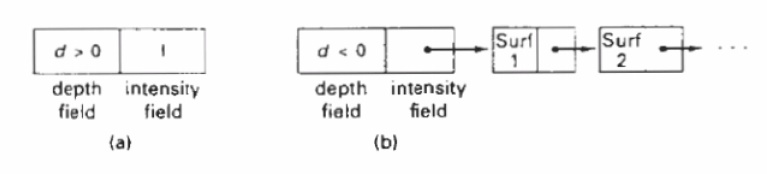
A- BUFFER METHOD
An extension of the ideas in the
depth-buffer method is the A-buffer method. The A buffer method represents an antialiased,
area-averaged, accumulation-buffer method developed by Lucasfilm for
implementation in the surface-rendering system called REYES (an acronym
for "Renders
Everything
You Ever Saw"). A drawback of the depth-buffer method is that it can only
find one visible surface at each pixel position. The A-buffer method expands
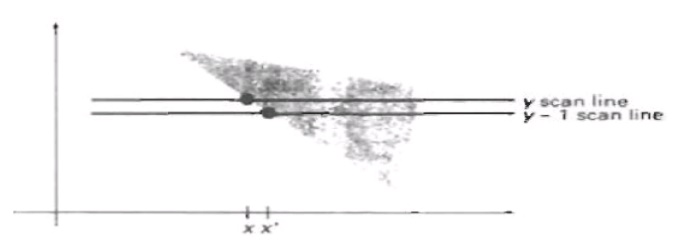
SCAN-LINE METHOD
This
image-space method for removing hidden surfaces is an extension of the
scan-line algorithm for filling polygon interiors. As each scan line is
processed, all polygon surfaces intersecting that line are examined to
determine which are visible. Across each scan line, depth calculations are made
for each overlapping surface to determine which is nearest to the view plane.
When the visible surface has been determined, the intensity value for that
position is entered into the refresh buffer.
We assume
that tables are set up for the various surfaces, which include both an edge
table and a polygon table. The edge table contains coordinate endpoints
for each line in-the scene, the inverse slope of each line, and pointers into
the polygon table to identify the surfaces bounded by each line. The polygon
table contains coefficients of the plane equation for each surface,
intensity information for the surfaces, and possibly pointers into the
edge table.
To
facilitate the search for surfaces crossing a given scan line, we can set up an
active list of edges from information in the edge table. This active list will
contain only edges that cross the current scan line, sorted in order of
increasing x. In addition, we define a flag for each surface that
is set on or off to indicate whether a position along a scan line is inside or
outside of the surface. Scan lines are processed from left to right. At the
leftmost boundary of a surface, the surface flag is turned on; and at the
rightmost boundary, it is turned off.
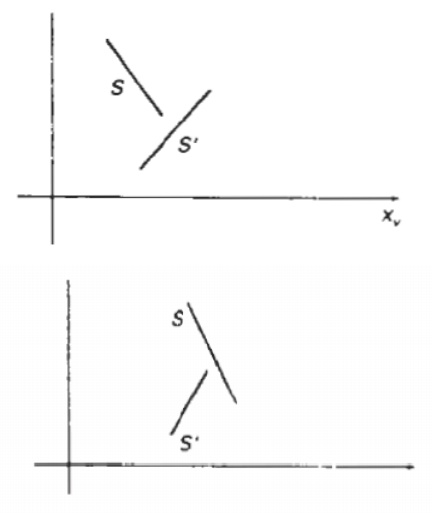
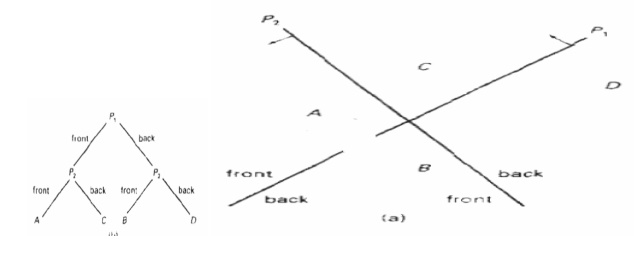
BSP-Tree Method A binary
space-partitioning (BSP) tree is an efficient
method for determining object visibility by painting surfaces onto the
screen from back to front, as in the painter's algorithm. The BSP tree is
particularly useful when the view reference point changes, but the objects in a
scene are at fixed positions. Applying a BSP tree to visibility testing
involves identifying surfaces that are "inside" and
"outside" the partitioning plane at each step of the space subdivision,
relative to the viewing direction. The figure(a) illustrates the basic concept
in this algorithm.
Area – Subdivision Method
This
technique for hidden-surface removal is essentially an image-space method ,but
object-space operations can be used to accomplish depth ordering of surfaces.
The area-subdivision method takes advantage of area coherence in a scene by
locating those view areas that represent part of a single surface. We apply
this method by successively dividing the total viewing area into smaller and smaller
rectangles until each small area is the projection of part of a single visible
surface or no surface at all.
octree methods
When an octree
representation is used for the viewing volume, hidden-surface elimination is
accomplished by projecting octree nodes onto the viewing surface in a
front-to-back order. In the below Fig. the front face of a region of space (the
side toward the viewer) is formed with octants 0, 1, 2, and 3. Surfaces
in the front of these octants are visible to the viewer. Any surfaces toward
the re in the back octants (4,5,6, and 7) may be hidden by the front surfaces.
When an octree
representation is used for the viewing volume, hidden-surface elimination is
accomplished by projecting octree nodes onto the viewing surface in a front-to-back
order. In the below Fig. the front face of a region of space (the side toward
the viewer) is formed with octants 0, 1, 2, and 3. Surfaces in the front
of these octants are visible to the viewer. Any surfaces toward the re in the
back octants (4,5,6, and 7) may be hidden by the front surfaces.
SIGNIFICANCE:
This
technique for hidden-surface removal is essentially an image-space method ,but
object-space operations can be used to accomplish depth ordering of surfaces.
APPLICATIONS:
1.Real time 3D magic
2.Implement 3D transformations
3.Correct view about 3D
Related Topics