Chapter: An Introduction to Parallel Programming : Shared-Memory Programming with OpenMP
Caches, Cache Coherence, and False Sharing
CACHES, CACHE COHERENCE, AND FALSE SHARING
Recall that for a number of years now, processors
have been able to execute opera-tions much faster than they can access data in
main memory, so if a processor must read data from main memory for each
operation, it will spend most of its time simply waiting for the data from
memory to arrive. Also recall that in order to address this problem, chip
designers have added blocks of relatively fast memory to processors. This
faster memory is called cache memory.
The design of cache memory takes into
consideration the principles of temporal and spatial locality: if a processor accesses main memory location x at time t, then it is likely that at times close to t, it will access main memory locations close to x. Thus, if a processor needs to access main
memory location x, rather than transferring only the contents of x to/from main memory, a block of memory
containing x is tranferred from/to the processor’s cache.
Such a block of memory is called a cache line or cache
block.
We’ve already seen in Section 2.3.4 that the
use of cache memory can have a huge impact on shared memory. Let’s recall why.
First, consider the following situation. Suppose x is a shared variable with the value 5, and
both thread 0 and thread 1 read x from memory into their (separate) caches,
because both want to execute the statement
my - y = x;
Here, my y is a private variable defined by both threads.
Now suppose thread 0 executes the statement
x++;
Finally, suppose that thread 1 now executes
my_z = x;
where my _z is another private variable.
What’s the value in my_z? Is it 5? Or is it 6? The problem is that there are (at least)
three copies of x: the one in main memory, the one in thread 0’s
cache, and the one in thread 1’s cache. When thread 0 executed x++, what happened to the values in main memory and thread 1’s cache?
This is the cache coherence prob-lem, which we discussed in Chapter 2. We
saw there that most systems insist that the caches be made aware that changes
have been made to data they are caching. The line in the cache of thread 1
would have been marked invalid when thread 0 executed x++, and before assigning my_z = x, the core running thread 1 would see that it’s value of x was out of date. Thus, the core running thread 0 would have to
update the copy of x in main memory (either now or earlier), and
the core running thread 1 would get the line with the updated value of x from main memory. For further details, see Chapter 2.
The use of cache coherence can have a dramatic
effect on the performance of shared-memory systems. To illustrate this, let’s
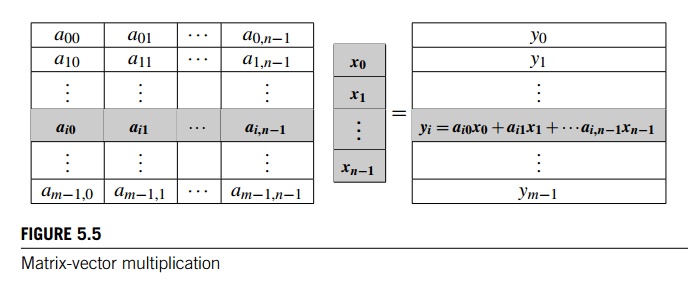
take a look at matrix-vector multipli-cation. Recall that if A = (aij) is an m n matrix and x is a vector with n components, then their product y = Ax is a vector with m components, and its ith component yi is found by forming the dot product of the ith row of A with x:
yi = ai0x0 + ai1x1
+ ··· + ai,n−1xn−1.
See Figure 5.5.
So if we store A as a two-dimensional array and x and y as one-dimensional arrays, we can implement serial matrix-vector
multiplication with the following code:
for (i =
0; i < m; i++) { y[i] = 0.0;
for (j =
0; j < n; j++) y[i] += A[i][j] x[j];
}
There are no loop-carried dependences in the
outer loop, since A and x are never updated and iteration i only updates y[i]. Thus, we can parallelize this by dividing the
iterations in the outer loop among the threads:
# pragma omp parallel for num_threads(thread count) \
default(none)
private(i, j) shared(A, x, y, m, n)
for
(i = 0; i < m; i++) {
y[i]
= 0.0;
for
(j = 0; j < n; j++)
y[i]
+= A[i][j]* x[j];
}
If Tserial is the
run-time of the serial program and Tparallel is the
run-time of the parallel program, recall that the efficiency E of the parallel program is the speedup S divided by the number of threads, t:
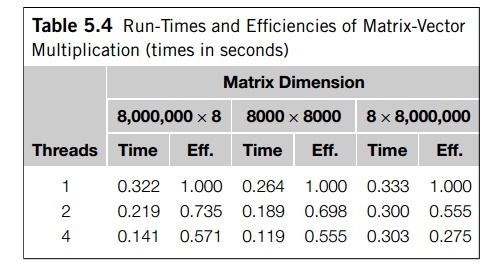
Since S<=t, E<=1. Table 5.4 shows the run-times and efficiencies of our
matrix-vector multiplication with different sets of data and differing numbers
of threads.
In each case, the total number of floating
point additions and multiplications is 64, 000, 000. An analysis that only
considers arithmetic operations would predict that a single thread running the
code would take the same amount of time for all three inputs. However, it’s
clear that this is not the case. The 8, 000, 000 x8 system requires about 22% more time
than the 8000x 8000 system, and the 8x 8, 000, 000 system requires about 26%
more time than the 8000 x8000 system. Both of these differences are at least
partially attributable to cache performance.
Recall that a write-miss occurs when a core tries to update a variable that’s not in cache,
and it has to access main memory. A cache profiler (such as Valgrind [49])
shows that when the program is run with the 8, 000, 000x 8 input, it has far
more
cache write-misses than either of the other
inputs. The bulk of these occur in Line 4. Since the number of elements in the
vector y is far greater in this case (8,000,000 vs. 8000 or 8), and each
element must be initialized, it’s not surprising that this line slows down the
execution of the program with the 8,000,000 x8 input.
Also recall that a read-miss occurs when a core tries to read a variable that’s not in cache,
and it has to access main memory. A cache profiler shows that when the program
is run with the 8 x8,000,000 input, it has far more cache read-misses than
either of the other inputs. These occur in Line 6, and a careful study of this
program (see Exercise 5.12) shows that the main source of the differences is
due to the reads of x. Once again, this isn’t surprising, since for
this input, x has 8,000,000 elements, versus only 8000 or 8 for the other
inputs.
It should be noted that there may be other
factors that affect the relative perfor-mance of the single-threaded program
with differing inputs. For example, we haven’t taken into consideration whether
virtual memory (see Section 2.2.4) has affected the performance of the program
with the different inputs. How frequently does the CPU need to access the page
table in main memory?
Of more interest to us, though, are the
differences in efficiency as the num-ber of threads is increased. The
two-thread efficiency of the program with the 8 x8,000,000 input is more than
20% less than the efficiency of the program with the 8,000,000 x8 and the 8000 x8000
inputs. The four-thread efficiency of the program with the 8x 8,000,000 input
is more than 50% less than the program’s efficiency with the 8,000,000 8 and
the 8000x 8000 inputs. Why, then, is the multithreaded performance of the
program so much worse with the 8 x8,000,000 input?
In this case, once again, the answer has to do
with cache. Let’s take a look at the program when we run it with four threads.
With the 8,000,000x 8 input, y has 8,000,000 components, so each thread is
assigned 2,000,000 components. With the 8000x 8000 input, each thread is
assigned 2000 components of y, and with the 8 x8,000,000 input, each thread
is assigned two components. On the system we used, a cache line is 64 bytes.
Since the type of y is double, and a double is 8 bytes, a single cache line will store eight doubles.
Cache coherence is enforced at the “cache-line
level.” That is, each time any value in a cache line is written, if the line is
also stored in another core’s cache, the entire line will be invalidated—not just the value that was written. The system
we’re using has two dual-core processors and each processor
has its own cache. Suppose for the moment that threads 0 and 1 are assigned to
one of the processors and threads 2 and 3 are assigned to the other. Also
suppose that for the 8 x 8,000,000 problem all of y is stored in a single cache line. Then every write to some element
of y will invalidate the line in the other processor’s cache. For
example, each time thread 0 updates y[0] in the statement
y[i] += A[i][j] x[j];
if thread 2 or 3 is executing this code, it
will have to reload y. Each thread will update each of its
components 8,000,000 times. We see that with this assignment of threads to
processors and components of y to cache lines, all the threads will have to
reload y many times. This is going to happen in spite of the fact that only one
thread accesses any one component of y—for example, only thread 0 accesses y[0].
Each thread will update its assigned components
of y a total of 16,000,000 times. It appears that many, if not most, of
these updates are forcing the threads to access main memory. This is called false sharing. Suppose two threads with separate caches
access different variables that belong to the same cache line. Further suppose
at least one of the threads updates its variable. Even though neither thread
has written to a shared variable, the cache controller invalidates the entire
cache line and forces the other threads to get the values of the variables from
main memory. The threads aren’t sharing anything (except a cache line), but the
behavior of the threads with respect to memory access is the same as if they
were sharing a variable. Hence the name false
sharing.
Why is false sharing not a problem with the
other inputs? Let’s look at what happens with the 8000 8000 input. Suppose
thread 2 is assigned to one of the pro-cessors and thread 3 is assigned to
another. (We don’t actually know which threads are assigned to which
processors, but it turns out—see Exercise 5.13—that it doesn’t matter.) Thread
2 is responsible for computing
y[4000], y[4001], . . . , y[5999],
and thread 3 is responsible for computing
y[6000], y[6001], . . . , y[7999]
If a cache line contains eight consecutive doubles, the only possibility for false shar-ing is
on the interface between their assigned elements. If, for example, a single
cache line contains
y[5996], y[5997], y[5998], y[5999], y[6000],
y[6001], y[6002], y[6003],
then it’s conceivable that there might be false
sharing of this cache line. However, thread 2 will access
y[5996], y[5997], y[5998], y[5999]
at the end of its iterations of the for i loop, while thread 3 will access
y[6000], y[6001], y[6002], y[6003]
at the beginning of its iterations. So it’s very likely that when thread 2
accesses, say, y[5996], thread 3 will be long done with all four of
y[6000], y[6001], y[6002], y[6003].
Similarly, when thread 3 accesses, say, y[6003], it’s very likely that thread 2 won’t be anywhere near starting to
access
y[5996], y[5997], y[5998], y[5999].
It’s therefore unlikely that false sharing of
the elements of y will be a significant problem with the 8000
8000 input. Similar reasoning suggests that false sharing of y is unlikely to be a problem with the 8, 000, 000 8 input. Also note
that we don’t need to worry about false sharing of A or x, since their values are never updated by the
matrix-vector multiplication code.
This brings up the question of how we might
avoid false sharing in our matrix-vector multiplication program. One possible
solution is to “pad” the y vector with dummy elements in order to insure
that any update by one thread won’t affect another thread’s cache line. Another
alternative is to have each thread use its own private stor-age during the
multiplication loop, and then update the shared storage when they’re done (see
Exercise 5.15).
Related Topics