Chapter: Special Electrical Machines : Permanent Magnet Brushless D.C. Motors
Torque- Speed Charactersistics of BLPM SQM DC Motor
TORQUE- SPEED CHARACTERSISTICS OF
BLPM SQM DC MOTOR
Let the
supply voltage V be constant. A family of torque speed characteristics for
various constant supply voltages is as shown in figure 4.20
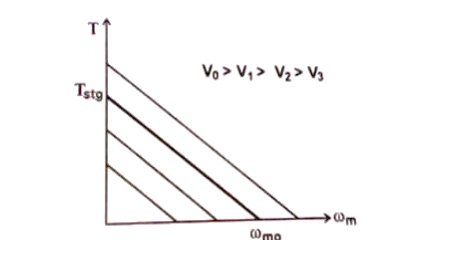
Fig 4.20
T-ωm curve for various supply voltages
Permissible region of operation in T-ωm
plane
Torque
speed characteristics of BLPM square wave motor is shown in fig.4.21. The
constraints are
1. The continues current should not exceed the permissible current limit In (i.e) Torques should not exceed Kt In.
2. The
maximum permissible supply voltage = Vn.
3. The speed
should not exceed ωmn.
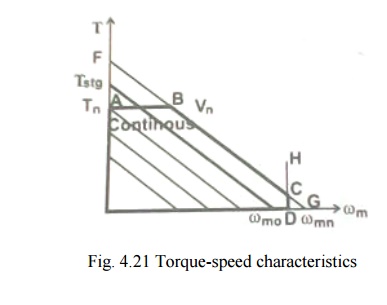
Line AB
Parallel
to X-axis represents maximum permissible torque line which corresponds to
maximum permissible current In.
Line FG
It
represents T-ωm characteristics corresponding to the maximum
permissible Vn. B and C are points in Fg. B is the point of
intersection between AB and FG.
Line DH
It
represents constant maximum permissible speed line (i.e) ωmn is
constant. DH intersects FG and x axis at D.
The area
OABCDO is the permissible region of operation. To obtain a particular point P
corresponding to given load-torque and speed condition the only way to operate
the motor at P is by suitably adjusting the supply voltage fed to the motor.
v If the
phase resistance is small as it should be in an efficient design, then the
characteristics to that of a shunt dc motor. The speed is essentially
controlled by the voltage V and may be changed by changing the supply voltage.
Then the current drawn just to drive the torque at its speed.
v As the
load torque is increased, the speed drops and the drop is directly proportional
to the phase resistance and the torque.
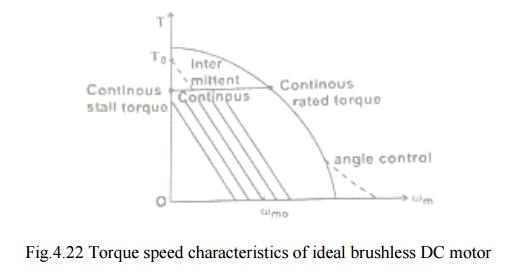
v The
voltage is usually controlled by chopping or PWM. This gives rise to a family
of torque speed characteristics as shown in fig. 4.22. The boundaries of
continuous and intermittent limits are shown.
Continuous
limit - determined by the heat transfer and temperature rise.
Intermittent
limit – determined by the maximum ratings of semiconductor devices in circuit.
In
practice the torque speed characteristics deviates from the ideal form because
of the effects of inductance and other parasitic influences.
Also the
speed range can be extended by increasing the dwell of conduction period
relative to the rotor position.
Related Topics