Chapter: Special Electrical Machines : Permanent Magnet Brushless D.C. Motors
A controller for BLPM SQW DC Motor
A controller for BLPM SQW DC
Motor
1. Power Circuit
Power
Circuit of BLPM de motor is as shown fig consists of six power semiconductor
switching device connected in bridge configuration across a dc supply. A
suitable shunt resistance is connected in series to get the current feedback.
Feedback diodes are connected across the device. The armature winding is
assumed to be star connected. Rotor has a rotor position sensor and a
techo-generator is coupled to the shaft to get feedback signal.
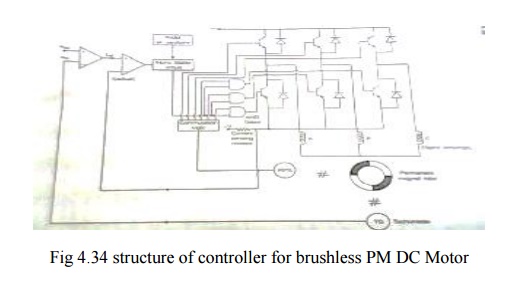
2. Control circuit
The
control circuits consist of a commutation logic unit. Which get the information
about the rotor shaft position and decides which switching devices are to be
turned on and which devices are to be turned off. This provides six output
signals out of which three are used as the base drive for the upper leg
devices. The other three output signal are logically AND with the high
frequency pulses and the resultant signals are used to drive the lower leg
devices.
A
comparator compares the tachogenerator output with reference speed and the
output signal is considered as the reference current signal for the current
comparator which compare the reference current with the actual current and the
error signal output is fed to the monostable multivibrator which is excited by
high frequency pulses. The duty cycle of the output of monostable is controlled
by error signal. This output signal influences the conduction period and duty
cycle of lower leg devices.
Rotor Position sensors for BLPM motor
It
converts the information of rotor shaft position into suitable electrical
signal. This signal is utilized to switch ON and OFF the various semiconductor
devices of electric switching and commutation circuitry of BLPM motor.
Two
popular rotor sensors are
Optical
Position Sensor.
Hall
Effect Position Sensor.
(a) Optical position sensor
This
makes use of six photo transistors. This device is turned into ON state when
light rays fall on the devices. Otherwise the device is in OFF state the
schematic representation is shown in fig.
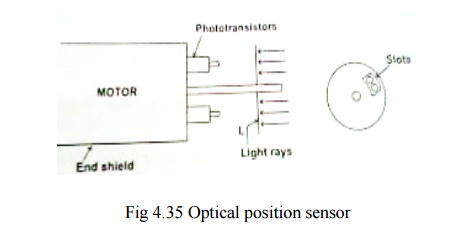
The
phototransistors are fixed at the end shield cover such that they are mutually
displaced by 60 degree electrical by a suitable light source. The shaft carries
a circular disc which rotates along the shaft. The disc prevents the light ray
falling on the devices. Suitable slot are punched in the disc such turned into
on state suitably turns the main switching devices of electronic commutation
circuitry into on state.
As the
shaft rotates, the devices of electronic commutation which are turned into ON
are successively changed.
(b) Hall effect position sensor
Consider
a small pellet of n-type semiconducting material as shown in fig 4.36.
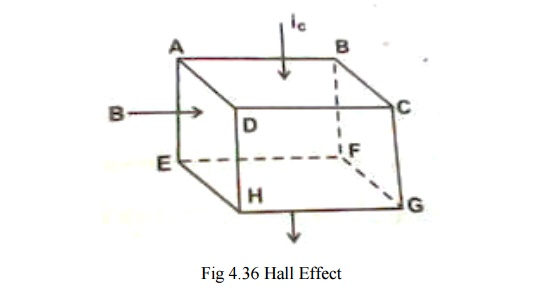
A current ic is allowed to pass from the surface ABCD to the surface EFGH. Let the surface
ABEF be subjected to a North pole magnetic field of flux density B tesla. As
per Fleming left hand rule, the positive charge in the pellet get concentrated
near surface ADHE and negative charges near the surface BCFG. Since n-type
material has free negative charges, there electrons gets concentrated near the
surface BCGF.This charge in distribution makes the surface ADHE more positive
than the surface BCGF. This potential known as Hall emf or emf due to Hall
Effect.
It has
been experimentally shown that emf due to hall effect is VH is given
by VH = RH(ic / d) volts
Where ic
current through the pellet in amps B- Flux density in tesla
d-
Thickness of the pellet in m.
RH
– Constant which depends upon the physical dimensions or physical properties of
the pellet. If the polarity of B is changed from North Pole to South Pole the
polarity of the emf due to Hall Effect also get changed.
3. Hall Effect Position Sensor
Hall effect position sensor can be advantageously used in a BLPM motor. Consider a 2 pole BLPM motor with two winding w1 and w2 as shown in fig.
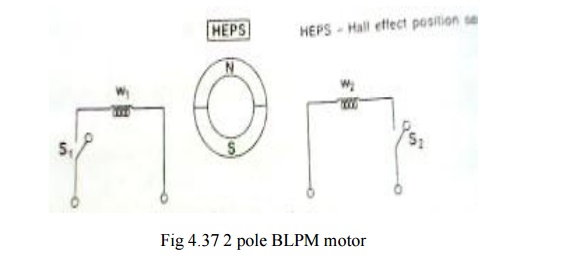
When w1
carries a current on closing S1 it set up a North Pole flux in the air gap.
Similarly when s2 is closed w2 is energized and sets up a North Pole flux.w1
and w2 are located in the stator such that their axes are 180 degree apart. A
Hall Effect position sensor is kept in an axis of the winding.
When Hall
Effect position sensor is influenced by North Pole flux the hall emf is made to
operate the switch S1. Then w1 sets up North Pole flux. The rotor experiences a
torque and South Pole of the rotor tends to align with the axis of w1.because
of interia.it overshoot the rotor hence rotates in clockwise direction. Now
HEPS is under the influence of S pole flux of the rotor. Then the polarity of
hall emf gets changed. This make the switch S1 in off state and S2 is closed.
Now w2 sets up N pole flux in the air gap, the rotor rotates in clockwise
direction. So that the s pole gets aligned with w2 axis.Then this process
continuous. The rotor rotates continuously.
Related Topics