Chapter: Introduction to the Design and Analysis of Algorithms : Divide and Conquer
The Closest Pair Problem by Divide and Conquer
The Closest-Pair and Convex-Hull Problems by Divide-and-Conquer
In previews Section , we discussed the brute-force approach to solving two classic prob-lems of computational geometry: the closest-pair problem and the convex-hull problem. We saw that the two-dimensional versions of these problems can be solved by brute-force algorithms in (n2) and O(n3) time, respectively. In this section, we discuss more sophisticated and asymptotically more efficient algorithms for these problems, which are based on the divide-and-conquer technique.
The
Closest-Pair Problem
Let P be a set of n > 1 points in the Cartesian plane.
For the sake of simplicity, we assume that the points are distinct. We can also
assume that the points are ordered in nondecreasing order of their x coordinate. (If they were not,
we could sort them first by an efficeint sorting algorithm such as mergesort.)
It will also be convenient to have the points sorted in a separate list in
nondecreasing order of the y
coordinate; we will denote such a list Q.
If 2 Ōēż n Ōēż 3, the
problem can be solved by the obvious brute-force algorithm. If n > 3, we can
divide the points into two subsets Pl and Pr of n/2 and n/2 points,
respectively, by drawing a vertical line through the median m of their x coordinates so that n/2 points lie to the left of or on
the line itself, and n/2 points
lie to the right of or on the line. Then we can solve the closest-pair problem
recursively
for subsets Pl and Pr . Let dl and dr be the
smallest distances between pairs of points in Pl and Pr , respectively, and let d = min{dl, dr }.
Note that
d is not necessarily the smallest
distance between all the point pairs because points of a closer pair can lie on
the opposite sides of the separating line. Therefore, as a step combining the
solutions to the smaller subproblems, we need to examine such points.
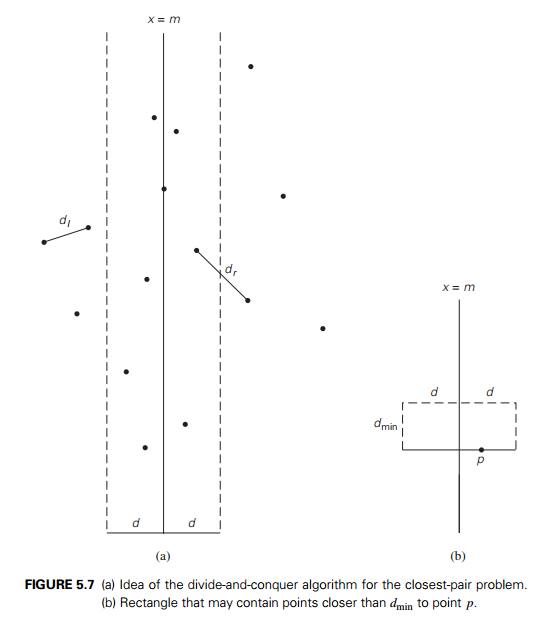
Obviously, we can limit our attention to the points inside the symmetric
vertical strip of width 2d around
the separating line, since the distance between any other pair of points is at
least d (Figure 5.7a).
Let S be the list of points inside the
strip of width 2d around
the separating line, obtained from Q and
hence ordered in nondecreasing order of their y
coor-dinate. We will scan this list, updating the information about dmin, the minimum distance seen so
far, if we encounter a closer pair of points. Initially, dmin = d, and
subsequently
dmin Ōēż d. Let p(x, y) be a point on this list. For a
point p (x , y ) to have a chance to be closer to
p than dmin, the
point must follow p on list S and the difference between their
y coordinates must be less than dmin (why?).
Geometri-
cally,
this means that p must
belong to the rectangle shown in Figure 5.7b. The principal insight exploited
by the algorithm is the observation that the rectangle can contain just a few
such points, because the points in each half (left and right) of the rectangle
must be at least distance d apart.
It is easy to prove that the total number of such points in the rectangle,
including p, does not exceed eight (Prob-lem
2 in this sectionŌĆÖs exercises); a more careful analysis reduces this number to
six (see [Joh04, p. 695]). Thus, the algorithm can consider no more than five
next points following p on the
list S, before moving up to the next
point.
Here is
pseudocode of the algorithm. We follow the advice given in Section 3.3 to avoid
computing square roots inside the innermost loop of the algorithm.
ALGORITHM EfficientClosestPair(P , Q)
//Solves
the closest-pair problem by divide-and-conquer
//Input:
An array P of n Ōēź 2 points in the Cartesian plane
sorted in
nondecreasing order of their x coordinates and an array Q of the
same points sorted in nondecreasing order of the y coordinates //Output: Euclidean
distance between the closest pair of points
if n Ōēż 3
return
the minimal distance found by the brute-force algorithm
else
copy the
first n/2 points of P to array Pl copy the
same n/2 points from Q to array Ql copy the
remaining n/2 points of P to array Pr copy the
same n/2 points from Q to array Qr dl ŌåÉ EfficientClosestPair(Pl, Ql)
dr ŌåÉ EfficientClosestPair(Pr , Qr )
d ŌåÉmin{dl, dr }
m ŌåÉ P [ n/2 ŌłÆ 1].x
copy all
the points of Q for
which |x ŌłÆ m| < d into array S[0..num ŌłÆ 1] dminsq
ŌåÉ d2
for i ŌåÉ 0 to num ŌłÆ 2 do k ŌåÉ i + 1
while k Ōēż num ŌłÆ 1 and (S[k].y ŌłÆ S[i].y)2 <
dminsq
dminsq ŌåÉ min((S[k].x
ŌłÆ S[i].x)2+ (S[k].y ŌłÆ S[i].y)2, dminsq) k ŌåÉ k + 1
return sqrt(dminsq)
The
algorithm spends linear time both for dividing the problem into two problems
half the size and combining the obtained solutions. Therefore, assuming as
usual that n is a power of 2, we have the
following recurrence for the running time of the algorithm:
T (n) = 2T (n/2) + f
(n),
where f (n) Ōłł (n). Applying
the Master Theorem (with a = 2,
b = 2, and d = 1), we get T (n) Ōłł (n log n). The necessity to presort input
points does not change the overall efficiency class if sorting is done by a O(n log n)
algorithm such as mergesort. In fact, this is the best efficiency class one can
achieve, because it has been proved that any algorithm for this problem must be
in (n log n) under some natural assumptions
about operations an algorithm can perform (see [Pre85, p. 188]).
Related Topics