Chapter: Introduction to the Design and Analysis of Algorithms : Divide and Conquer
Quicksort
Quicksort
Quicksort
is the other important sorting algorithm that is based on the
divide-and-conquer approach. Unlike mergesort, which divides its input elements
according to their position in the array, quicksort divides them according to
their value. We already encountered this idea of an array partition in Section
4.5, where we discussed the selection problem. A partition is an arrangement of
the arrayŌĆÖs elements so that all the elements to the left of some element A[s] are
less than or equal to A[s], and all
the elements to the right of A[s] are greater than or equal to
it:
Obviously,
after a partition is achieved, A[s] will be in its final position
in the sorted array, and we can continue sorting the two subarrays to the left
and to the right of A[s] independently (e.g., by the
same method). Note the difference with mergesort: there, the division of the
problem into two subproblems is immediate and the entire work happens in
combining their solutions; here, the entire work happens in the division stage,
with no work required to combine the solutions to the subproblems.
Here is
pseudocode of quicksort: call Quicksort(A[0..n ŌłÆ 1]) where
ALGORITHM Quicksort(A[l..r])
//Sorts a
subarray by quicksort
//Input:
Subarray of array A[0..n ŌłÆ 1], defined by its left and right
indices l and r
//Output:
Subarray A[l..r] sorted
in nondecreasing order
if l < r
s ŌåÉPartition(A[l..r])
//s is a split position
Quicksort(A[l..s ŌłÆ 1])
Quicksort(A[s + 1..r])
As a
partition algorithm, we can certainly use the Lomuto partition discussed in
Section 4.5. Alternatively, we can partition A[0..n ŌłÆ 1] and,
more generally, its subarray A[l..r] (0 Ōēż l
< r Ōēż n ŌłÆ 1) by the
more sophisticated method suggested by C.A.R. Hoare, the prominent British
computer scientist who invented quicksort.
As
before, we start by selecting a pivotŌĆöan element with respect to whose value we
are going to divide the subarray. There are several different strategies for
selecting a pivot; we will return to this issue when we analyze the algorithmŌĆÖs
efficiency. For now, we use the simplest strategy of selecting the subarrayŌĆÖs
first element: p = A[l].
Unlike
the Lomuto algorithm, we will now scan the subarray from both ends, comparing
the subarrayŌĆÖs elements to the pivot. The left-to-right scan, denoted below by
index pointer i, starts
with the second element. Since we want elements smaller than the pivot to be in
the left part of the subarray, this scan skips over elements that are smaller
than the pivot and stops upon encountering the first element greater than or
equal to the pivot. The right-to-left scan, denoted below by index pointer j, starts with the last element of
the subarray. Since we want elements larger than the pivot to be in the right
part of the subarray, this scan skips over elements that are larger than the
pivot and stops on encountering the first element smaller than or equal to the
pivot. (Why is it worth stopping the scans after encountering an element equal
to the pivot? Because doing this tends to yield more even splits for arrays
with a lot of duplicates, which makes the algorithm run faster. For example, if
we did otherwise for an array of n equal
elements, we would have gotten a split into subarrays of sizes n ŌłÆ 1 and 0,
reducing the problem size just by 1 after scanning the entire array.)
After
both scans stop, three situations may arise, depending on whether or not the
scanning indices have crossed. If scanning indices i and j have not crossed, i.e., i < j, we simply exchange A[i] and A[j
] and
resume the scans by incrementing i and
decrementing j, respectively:

ALGORITHM HoarePartition(A[l..r])
//Partitions
a subarray by HoareŌĆÖs algorithm, using the first element
as a pivot
//Input:
Subarray of array A[0..n ŌłÆ 1], defined by its left and right
indices l and r (l < r)
//Output:
Partition of A[l..r], with
the split position returned as
this functionŌĆÖs value
p ŌåÉ A[l]
i ŌåÉ l; j ŌåÉ r + 1
repeat
repeat i ŌåÉ i + 1 until A[i] Ōēź p repeat j ŌåÉ j ŌłÆ 1 until A[j ] Ōēż p swap(A[i],
A[j ])
until i Ōēź j
swap(A[i], A[j ]) //undo last swap when i Ōēź j swap(A[l],
A[j ])
return j
Note that
index i can go out of the subarrayŌĆÖs
bounds in this pseudocode. Rather than checking for this possibility every time
index i is incremented, we can append to
array A[0..n ŌłÆ 1] a ŌĆ£sentinelŌĆØ that would
prevent index i from
advancing beyond position n. Note
that the more sophisticated method of pivot selection mentioned at the end of
the section makes such a sentinel unnecessary.
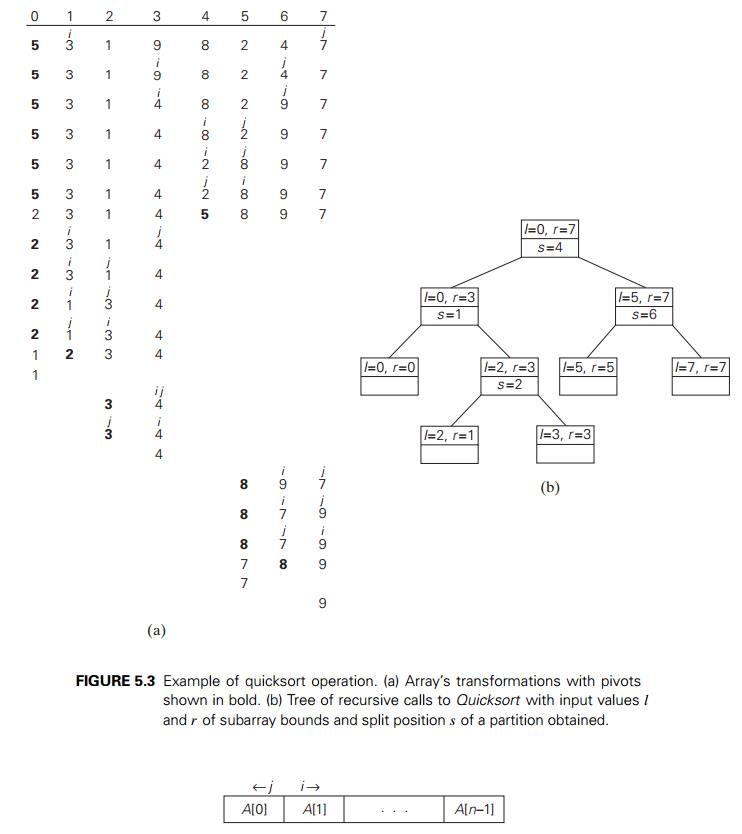
An
example of sorting an array by quicksort is given in Figure 5.3.
We start
our discussion of quicksortŌĆÖs efficiency by noting that the number of key
comparisons made before a partition is achieved is n + 1 if the scanning indices cross
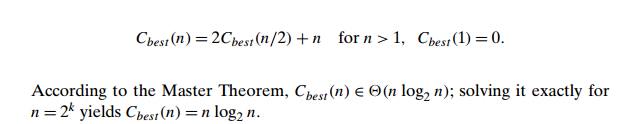
over and n if they coincide (why?). If all
the splits happen in the middle of corresponding subarrays, we will have the
best case. The number of key comparisons in the best case satisfies the
recurrence
In the
worst case, all the splits will be skewed to the extreme: one of the two
subarrays will be empty, and the size of the other will be just 1 less than the
size of the subarray being partitioned. This unfortunate situation will happen,
in particular, for increasing arrays, i.e., for inputs for which the problem is
already solved! Indeed, if A[0..n ŌłÆ 1] is a
strictly increasing array and we use A[0] as the
pivot, the left-to-right scan will stop on A[1] while
the right-to-left scan will go all the way to reach A[0], indicating the split at position
0:
So, after
making n + 1
comparisons to get to this partition and exchanging the pivot A[0] with itself, the algorithm
will be left with the strictly increasing array A[1..n ŌłÆ 1] to
sort. This sorting of strictly increasing arrays of diminishing sizes will
continue until the last one A[n ŌłÆ 2..n ŌłÆ 1] has
been processed. The total number of key comparisons made will be equal to

Thus, the
question about the utility of quicksort comes down to its average-case
behavior. Let Cavg(n) be the
average number of key comparisons made by quicksort on a randomly ordered array
of size n. A partition can happen in any
position s (0 Ōēż s Ōēż n ŌłÆ 1) after n + 1
comparisons are made to achieve the partition. After the partition, the left
and right subarrays will have s and n ŌłÆ 1 ŌłÆ s
elements, respectively. Assuming that the partition split can happen in each
position s with the same probability 1/n, we get the following recurrence
relation:
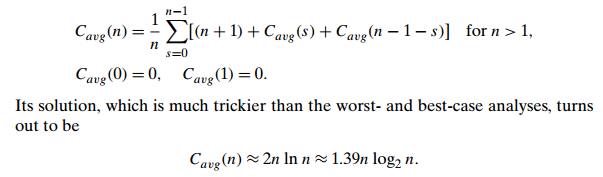
Thus, on
the average, quicksort makes only 39% more comparisons than in the best case.
Moreover, its innermost loop is so efficient that it usually runs faster than
mergesort (and heapsort, another n log n algorithm that we discuss in
Chapter 6) on randomly ordered arrays of nontrivial sizes. This certainly
justifies the name given to the algorithm by its inventor.
Because
of quicksortŌĆÖs importance, there have been persistent efforts over the years to
refine the basic algorithm. Among several improvements discovered by
researchers are:
better
pivot selection methods such as randomized quicksort that uses a
random element or the median-of-three method that uses the
median of the leftmost, rightmost, and the middle element of the array
switching
to insertion sort on very small subarrays (between 5 and 15 elements for most
computer systems) or not sorting small subarrays at all and finishing the
algorithm with insertion sort applied to the entire nearly sorted array
modifications of the partitioning algorithm such as the three-way partition
into segments smaller than, equal to, and larger than the pivot (see Problem 9
in this sectionŌĆÖs exercises)
According
to Robert Sedgewick [Sed11, p. 296], the worldŌĆÖs leading expert on quicksort,
such improvements in combination can cut the running time of the algorithm by
20%ŌĆō30%.
Like any
sorting algorithm, quicksort has weaknesses. It is not stable. It requires a
stack to store parameters of subarrays that are yet to be sorted. While the
size of this stack can be made to be in O(log n) by always sorting first the
smaller of two subarrays obtained by partitioning, it is worse than the O(1) space
efficiency of heapsort. Although more sophisticated ways of choosing a pivot
make the quadratic running time of the worst case very unlikely, they do not
eliminate it completely. And even the performance on randomly ordered arrays is
known to be sensitive not only to implementation details of the algorithm but
also to both computer architecture and data type. Still, the January/February
2000 issue of Computing in Science &
Engineering, a joint publication of the American Institute of Physics and the IEEE Computer
Society, selected quicksort as one of the 10 algorithms ŌĆ£with the greatest
influence on the development and practice of science and engineering in the
20th century.ŌĆØ
Exercises
5.2
1. Apply quicksort to sort the list E, X, A, M, P , L, E in alphabetical order. Draw the tree of the recursive calls made.
2. For the partitioning procedure outlined in this section:
Prove that if the scanning indices stop while
pointing to the same element, i.e., i = j, the
value they are pointing to must be equal to p.
Prove that when the scanning indices stop, j cannot point to an element more
than one position to the left of the one pointed to by i.
Give an example showing that quicksort is not a
stable sorting algorithm.
Give an example of an array of n elements for which the sentinel
mentioned in the text is actually needed. What should be its value? Also
explain why a single sentinel suffices for any input.
For the version of quicksort given in this section:
Are arrays made up of all equal elements the
worst-case input, the best-case input, or neither?
Are strictly decreasing arrays the worst-case
input, the best-case input, or neither?
a. For
quicksort with the median-of-three pivot selection, are strictly increas-ing
arrays the worst-case input, the best-case input, or neither?
Answer the same question for strictly decreasing
arrays.
a. Estimate
how many times faster quicksort will sort an array of one million random numbers than insertion sort.
True or false: For every n > 1, there
are n-element arrays that are sorted
faster by insertion sort than by quicksort?
Design an
algorithm to rearrange elements of a given array of n real
num-bers so that all its negative elements precede all its positive elements.
Your algorithm should be both time efficient and space efficient.
a. The Dutch
national flag problem is to rearrange an array of characters R, W
, and B (red, white, and blue are
the colors of the Dutch national flag) so
that all the RŌĆÖs come first, the W ŌĆÖs come next, and the BŌĆÖs come last. [Dij76] Design a linear
in-place algorithm for this problem.
Explain how a solution to the Dutch national flag
problem can be used in quicksort.
Implement quicksort in the language of your choice.
Run your program on a sample of inputs to verify the theoretical assertions
about the algorithmŌĆÖs efficiency.
11. Nuts and bolts You are given a collection of n bolts of different widths and n corresponding nuts. You are allowed to try a nut and bolt together, from which you can determine whether the nut is larger than the bolt, smaller than the bolt, or matches the bolt exactly. However, there is no way to compare two nuts together or two bolts together. The problem is to match each bolt to its nut. Design an algorithm for this problem with average-case efficiency in č│(n log n). [Raw91]
Related Topics