Chapter: Introduction to the Design and Analysis of Algorithms : Divide and Conquer
Convex Hull Problems by Divide and Conquer
The Closest-Pair and Convex-Hull Problems by Divide-and-Conquer
In Section 3.3, we discussed the brute-force approach to solving two classic prob-lems of computational geometry: the closest-pair problem and the convex-hull problem. We saw that the two-dimensional versions of these problems can be solved by brute-force algorithms in (n2) and O(n3) time, respectively. In this section, we discuss more sophisticated and asymptotically more efficient algorithms for these problems, which are based on the divide-and-conquer technique.
Let us
revisit the convex-hull problem, introduced in Section 3.3: find the smallest
convex polygon that contains n given
points in the plane. We consider here a divide-and-conquer algorithm called quickhull
because of its resemblance to quicksort.
Let S be a set of n > 1 points p1(x1, y1), . . . , pn(xn, yn) in the
Cartesian plane. We assume that the points are sorted in nondecreasing order of
their x coordinates, with ties resolved
by increasing order of the y
coordinates of the points involved. It is not difficult to prove the
geometrically obvious fact that the leftmost point p1 and the rightmost point pn are two
distinct extreme points of the setŌĆÖs convex
The
boundary of the convex hull of S is made
up of two polygonal chains: an ŌĆ£upperŌĆØ boundary and a ŌĆ£lowerŌĆØ boundary. The
ŌĆ£upperŌĆØ boundary, called the upper hull, is a sequence of line
segments with vertices at p1, some of
the points in S1 (if S1 is not
empty) and pn. The
ŌĆ£lowerŌĆØ boundary, called the lower hull, is a sequence of line
segments with vertices at p1, some of the points in S2 (if S2 is not
empty) and pn. The fact
that the convex hull of the entire set S is
composed of the upper and lower hulls, which can be constructed independently
and in a similar fashion, is a very useful observation exploited by several
algorithms for this problem.
For
concreteness, let us discuss how quickhull proceeds to construct the upper
hull; the lower hull can be constructed in the same manner. If S1 is
empty, the
upper
hull is simply the line segment with the endpoints at p1 and pn. If S1 is not
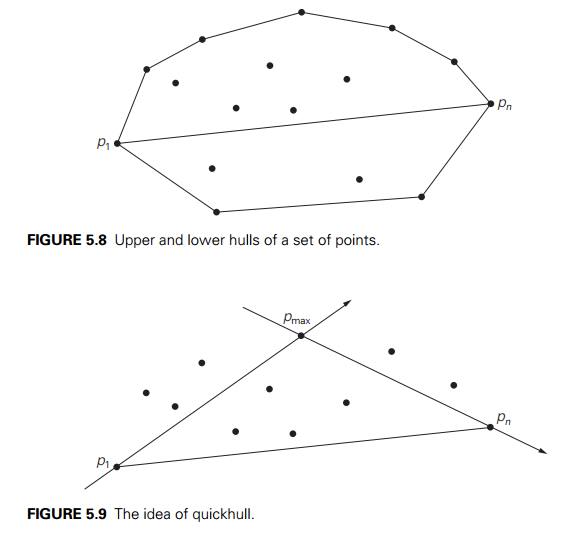
empty, the algorithm identifies point pmax in S1, which is the farthest from the
line
Therefore, the algorithm can continue constructing the upper hulls of p1 Ōł¬ S1,1 Ōł¬ pmax and pmax Ōł¬ S1,2 Ōł¬ pn recursively and then simply concatenate them to get the upper hull of the entire set p1 Ōł¬ S1 Ōł¬ pn.
Now we
have to figure out how the algorithmŌĆÖs geometric operations can be actually
implemented. Fortunately, we can take advantage of the following very useful
fact from analytical geometry: if q1(x1, y1), q2(x2, y2), and q3(x3, y3) are three arbitrary points in
the Cartesian plane, then the area of the triangle q1q2q3 is equal
to one-half of the magnitude of the determinant

while the
sign of this expression is positive if and only if the point q3 = (x3, y3) is to
ŌłÆŌłÆŌłÆŌåÆ
the left
of the line q1 q2 . Using this formula, we can check
in constant time whether a point lies to the left of the line determined by two
other points as well as find the distance from the point to the line.
Quickhull
has the same (n2) worst-case efficiency as
quicksort (Problem 9 in this sectionŌĆÖs exercises). In the average case,
however, we should expect a much better performance. First, the algorithm
should benefit from the quicksort-like savings from the on-average balanced
split of the problem into two smaller subproblems. Second, a significant
fraction of the pointsŌĆönamely, those inside p1pmaxpn (see
Figure 5.9)ŌĆöare eliminated from further processing. Under a natural assumption that points
given are chosen randomly from a uniform dis-tribution over some convex region
(e.g., a circle or a rectangle), the average-case efficiency of quickhull turns
out to be linear [Ove80].
Exercises
5.5
a. For the
one-dimensional version of the closest-pair problem, i.e., for the problem of finding two closest numbers
among a given set of n real
num-bers, design an algorithm that is directly based on the divide-and-conquer
technique and determine its efficiency class.
b. Is it a good algorithm for this
problem?
Prove that the divide-and-conquer algorithm for the
closest-pair problem examines, for every point p in the
vertical strip (see Figures 5.7a and 5.7b), no more than seven other points
that can be closer to p than dmin, the minimum distance between two
points encountered by the algorithm up to that point.
Consider the version of the divide-and-conquer
two-dimensional closest-pair algorithm in which, instead of presorting input
set P , we simply sort each of the two
sets Pl and Pr in
nondecreasing order of their y
coordinates on each recursive call. Assuming that sorting is done by mergesort,
set up a recurrence relation for the running time in the worst case and solve
it for n = 2k.
Implement
the divide-and-conquer closest-pair algorithm, outlined in this section, in the
language of your choice.
Find on the Web a visualization of an algorithm for
the closest-pair problem. What algorithm does this visualization represent?
The Voronoi
polygon for a point p of a set
S of points in the plane is
defined to be the perimeter of the set of all points in the plane closer to p than to any other point in S. The union of all the Voronoi
polygons of the points in S is
called the Voronoi diagram of S.
What is the Voronoi diagram for a set of three
points?
Find a visualization of an algorithm for generating
the Voronoi diagram on the Web and study a few examples of such diagrams. Based
on your observations, can you tell how the solution to the previous question is
generalized to the general case?
Explain how one can find point pmax in the
quickhull algorithm analytically.
What is the best-case efficiency of quickhull?
Give a specific example of inputs that make
quickhull run in quadratic time.
Implement quickhull in the language of your choice.
Creating
decagons There are 1000 points in the plane, no three of them on the same line. Devise an algorithm to construct 100 decagons
with their vertices at these points. The decagons need not be convex, but each
of them has to be simple, i.e., its boundary should not cross itself, and no
two decagons may have a common point.
Shortest path around There is
a fenced area in the two-dimensional Eu-clidean plane in the shape of a convex
polygon with vertices at points p1(x1, y1), p2(x2, y2), . . . , pn(xn, yn)
(not
necessarily in this order). There are
two more
points, a(xa, ya) and b(xb, yb) such
that xa < min{x1, x2, . . . , xn} and xb
> max{x1, x2, . . . , xn}. Design a reasonably efficient
algorithm for comput-ing the length of the shortest path between a and b. [ORo98]
Related Topics